Final project
The culmination of the Fab Academy journey

Update — the project pivoted. This page describes the project as I first proposed it: a four-leg standing desk. Partway through the build it pivoted to a single telescopic minimal modular-module (3m). I have kept the original concept, motivation and requirements below — they are still the reason the project exists — but what actually got built is the module described in the pivot section further down, and in full in the development page.
concept.
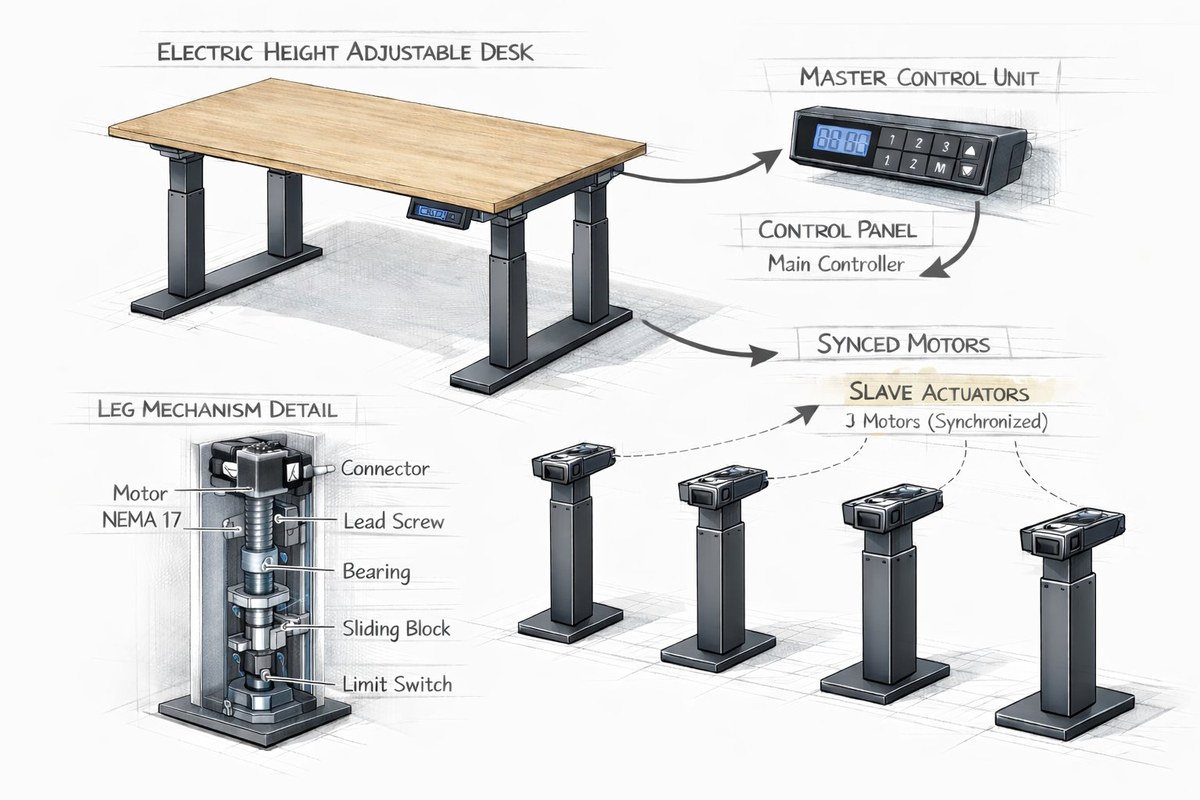
An electrically adjustable standing desk with a 4-leg structure ( approx. 1800 × 850 mm surface), designed for smooth transitions between sitting (650 mm) and standing (1250 mm) heights. Four synchronized linear actuators provide superior stability compared to commercial 2-leg designs, with ±2 mm levelling tolerance under 150 kg load.
motivation.
When I started thinking about my final project, I had to be honest with myself. I know how I work: if I pick something too ambitious and too complex, there is a real risk that I end up procrastinating and never finishing it. I have seen incredible Fab Academy projects — like Daniele Ingrassia drone with four motors and stability control so precise that he could place a cup of coffee on top and fly it without spilling a drop. That level of engineering is inspiring, but I also know my circumstances: a full professional life, responsibilities, and a limited time window to deliver. If almost forty years have taught me something, it is when to be strategic about your own limits.
So I chose to build a height-adjustable standing desk with four synchronized telescopic legs. It is not a simple project — it involves mechanical design, motor synchronization, PID control, embedded programming, networking between boards, and a user interface — but it is a project whose complexity I can manage and whose scope I can realistically complete.
What convinced me is that it covers almost every Fab Academy assignment in a meaningful way: CAD, electronics design and production, embedded programming, input and output devices, networking, interface programming, 3D printing, and system integration. It is not an artificial exercise — every skill I learn maps directly to something I need for the final result.
I also want this project to be thoroughly documented and shared with the community. I would not be here without the countless people who share their knowledge openly and selflessly. If this desk ends up being good enough to have a commercial path, I would explore that — but the open documentation will always be there. That is non-negotiable for me.
And finally, there is a personal health motivation. I spend far too many hours sitting. The growing body of scientific literature on the effects of prolonged sedentary behavior is hard to ignore:
- A meta-analysis across 19 cohort studies (over 1.4 million participants) found that high levels of sedentary behavior were associated with a 30% increased risk of cardiovascular disease, and that every additional hour spent sedentary corresponded to a 5% increase in CVD risk. (Saunders et al., 2023 — PubMed)
- The American Heart Association published a science advisory confirming that prolonged sedentary behavior is consistently linked to increased cardiovascular and all-cause mortality, independent of physical activity levels. (Young et al., 2016 — Circulation)
- A meta-analysis on occupational sedentary behavior specifically found that sedentary work increased the risk of mental health issues by 34%. (Leclercq et al., 2025 — PLOS ONE)
- Research on sit-stand desk interventions showed that workers using sit-stand desks significantly decreased their sitting time and had reduced neck and shoulder pain, along with increased subjective health and vitality. (Ma et al., 2021 — PMC)
- A 24-week workplace study demonstrated that replacing approximately 90 minutes of sitting with standing resulted in improvements in vascular function, insulin resistance, and triglyceride levels. (Gibbs et al., 2022 — PMC)
Building my own standing desk is not just a Fab Academy project. It is something I actually need, something I will use every day, and something that combines technical learning with a real improvement in how I work and live.



requirements.
At this point I see three major subsystems:
1. Mechanical structure.
- Frame: Welded or bolted steel tube construction.
- Legs: Actuator housings integrated into leg assemblies.
- Top: Solid wood or laminated panel with mounting interface.
2. Motion system.
- Actuators: 4× linear actuators (likely 12V or 24V DC).
- Synchronization: Position feedback + control algorithm.
- Power: Adequate PSU for simultaneous 4-actuator operation.
3. Control electronics.
- Main PCB: Microcontroller, motor drivers, position inputs.
- Interface: Buttons, optional display, memory pre-sets.
- Wiring: Power distribution, signal routing, cable management.
Initial sketches.
the pivot.
The project I defended is not the project I proposed. I started with a four-leg, electronically height-adjustable standing desk: four telescopic legs, four motors, a master board coordinating them over a UART bus. What I defended is a single telescopic module that raises and lowers a load under its own controller — 3m. The desk became one possible configuration of that module, not the deliverable.
It shrank in two steps, and I am not going to dress them up. The first was on May 7: I dropped the steel-and-TR10×3 final design for the build phase. Committing to an external metal fabricator inside a 33-day window, with no prior relationship, was a procurement risk I could not absorb, so the prototype moved to materials I could cut, print and source next-day — a T8×8 lead screw from the 3D-printer parts ecosystem, and a telescopic body I could make in the lab instead of ordering welded.
The second step is the real one: four legs became one. The reasons, in order of honesty — the calendar; a long tail of small unforeseen complexities (every printed part needed two or three iterations, every tolerance a test print, and the anti-rotation problem only showed up once the screw was actually turning); and, plainly, my own time management. Faced with delivering four half-working legs or one module that works end to end, I chose the module.
One module is the unit: four under a tabletop are a desk, two with a beam are a shelf, one on its own is a sit-stand pedestal — which is exactly what 3m is. A ~40 cm base resting on a normal ~74 cm table, a 28 cm stroke, reaching about 178 cm of standing working height and carrying up to roughly 3 kg.
The full build journal — every dead end, the second pivot from PVC tubes to printed bodies, and what each Fab Academy week contributed — is on the development page.
license.
3m: minimalist-mono-module © 2026 by Íñigo Gutiérrez Febles is licensed under CC BY 4.0![]()
![]()