Practical Development
Control of an SG90 Micro Servo Using a Potentiometer with Arduino
An embedded system was developed using an Arduino Uno to control the position of an SG90 micro servo through a potentiometer.
The system allows the servo angle to vary between 0° and 180°, depending on the position of the potentiometer, providing a simple and intuitive way to control motion.
In this setup, the potentiometer acts as an input device by generating a variable voltage signal. The Arduino reads and processes this analog signal, mapping it into a corresponding angle value. Finally, the servo motor operates as the output device, adjusting its position according to the processed signal.
Materials Used
- Arduino Uno: Main microcontroller used for processing and control.
- SG90 Micro Servo (9g): Actuator responsible for angular movement.
- 10kΩ Potentiometer: Input device used to vary the control signal.
- Protoboard: Used for assembling the circuit without soldering.
- Jumper wires: For electrical connections between components.
- USB cable: Provides power and enables programming of the board.
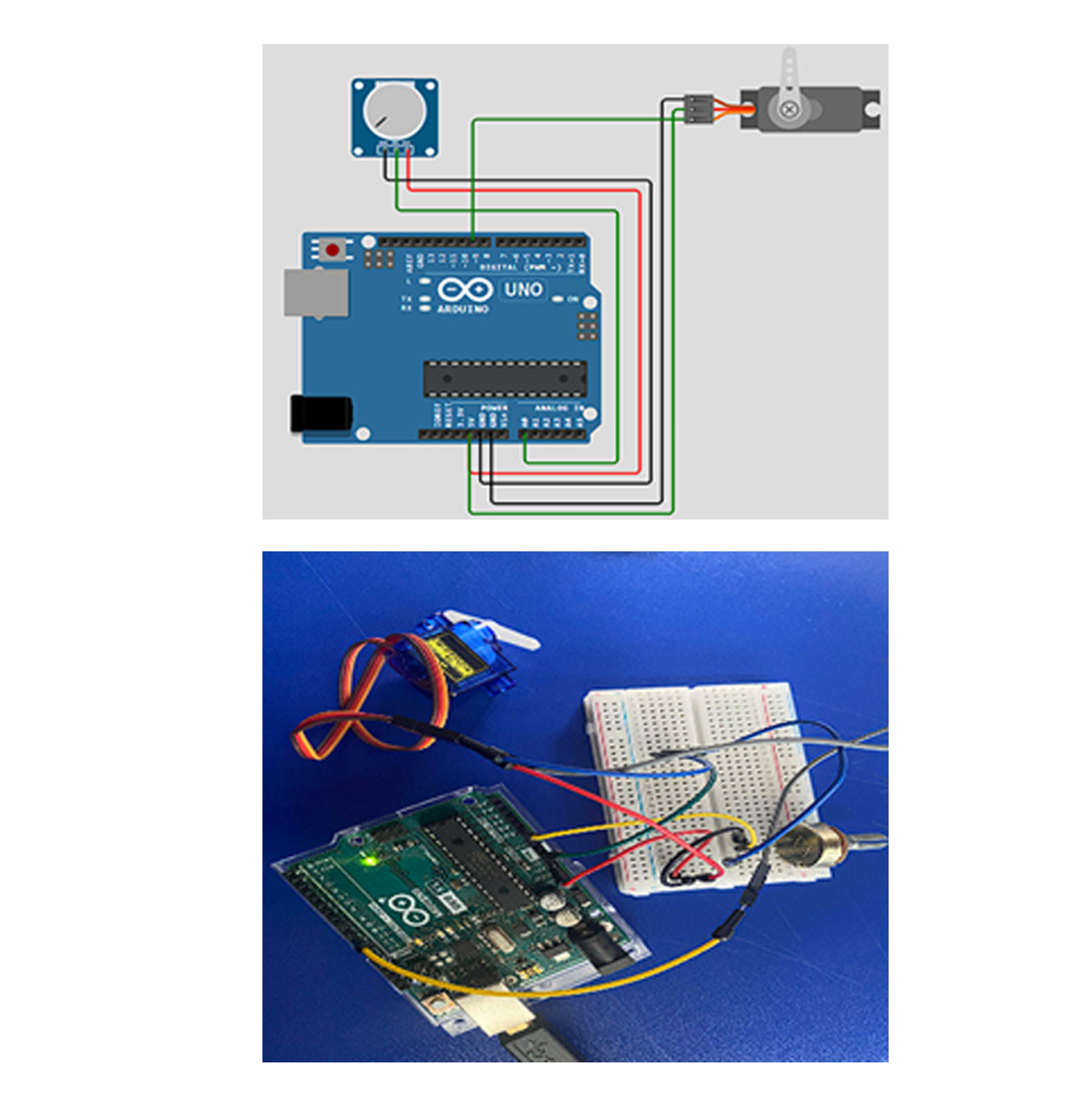
Connection Diagram
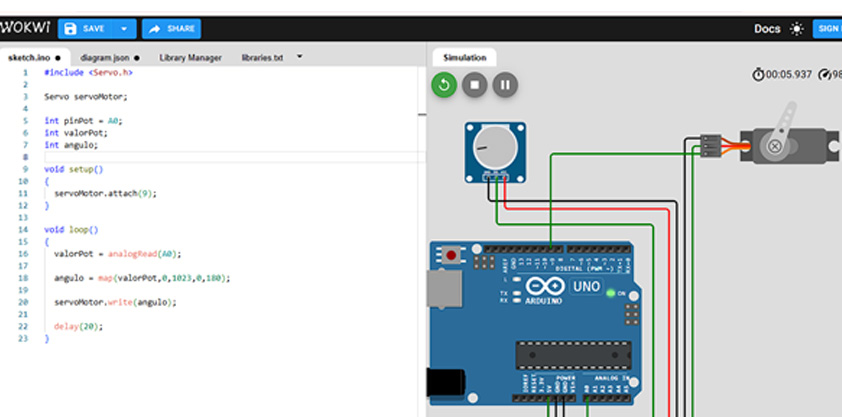
The circuit connections and simulation were developed using Wokwi, an open-source electronic simulation platform.
This tool allows the design, testing, and validation of embedded systems in a virtual environment before physical implementation, reducing errors and improving the overall development process.
Through the simulation, it was possible to verify the correct behavior of the system, ensuring that the potentiometer input accurately controls the servo motor position.