The proposal explores how architecture can become an interactive interface
capable of generating emotions, encouraging play, and creating a sense of
comfort and protection within educational environments.
The project consists of designing and fabricating a movable, interactive wall
that responds to touch and physical interaction. Users can press,
manipulate, and explore its surface, transforming the wall into a dynamic and
engaging element within the space.
Rather than being a static architectural feature, the wall becomes an
active participant in the spatial experience. Architecture is no
longer just a background—it becomes a medium for interaction, exploration,
and emotional connection.
Final Project Presentation
Final Project Video
Inspiration from related projects
The initial inspiration comes from interactive and kinetic wall systems shared on visual platforms such as Pinterest, where responsive surfaces react to movement, pressure, or proximity. These references demonstrate how modular systems, flexible materials, and simple mechanical principles can create dynamic and sensory spatial effects.
Conceptually, the project relates to the playful approach of Aldo van Eyck, who integrated play into children’s spatial environments, and to the atmospheric and emotional architecture of Peter Zumthor, who emphasizes sensory experience and emotional perception in space.
It also connects to experimental interactive environments developed at the MIT Media Lab, where technology and space merge to create responsive systems.
The conceptual starting point draws inspiration from classic games such as
Tic-tac-toe (3 in a row), memory games, and other activities based on
moving and arranging pieces. These games encourage concentration, pattern
recognition, strategic thinking, and playful interaction.
By combining elements of memory, movement, and physical engagement, the project
explores how these familiar forms of play can be translated into an interactive
architectural experience. The goal is not to replicate a specific game, but to
use their underlying principles to create opportunities for exploration,
learning, and social interaction within educational environments.
Design proces
The core concept originates from traditional games based on movement, memory,
and interaction, exploring how playful activities can be transformed into a
spatial and architectural experience.
First stage: Direct interaction between two visible players in front of a shared surface,
where the focus is on play, communication, and participation.
Second stage: Transition into a vertical system, where gravity and spatial orientation
influence how elements move, creating a more dynamic and physical interaction.
Third stage: The wall becomes a separating element between children. Players are no longer
visible to one another, creating anonymous interactions that encourage curiosity,
exploration, and indirect communication.
Fourth stage: Architecture evolves from a passive backdrop into an active component
of the experience. The wall is no longer just a boundary; it becomes an actor within
the game, influencing how users interact, move, and engage with the space.
Fifth stage: Architecture becomes an interactive interface capable of communicating
through physical contact and emotional engagement. Touch, movement, and sensory feedback
create a dialogue between users and the built environment, transforming architecture into
a medium for connection, play, and emotional experience.
This shift is fundamental. Anonymity reduces social exposure and pressure, allowing children to interact more freely. Instead of competing with a specific person, the user engages with the architecture itself.
The wall responds physically — it compresses, deforms, or allows partial perforation through touch. Technically, it may integrate mechanical systems, pneumatic logic, or sensor-based electronics developed through digital fabrication processes in Fab Academy.
Direct interaction
through play
Details
Direct interaction
through play
Details
Indirect interaction
through Architecture
Details
Architecture as a main actor
Interactive architecture
Project Goals
The project aims to explore how architecture can become an interactive medium
that promotes emotional well-being, learning, and social connection through play.
Curiosity and exploration
Physical movement and active participation
Memory and cognitive stimulation
Play-based learning
Social interaction
Emotional comfort and well-being
Reduced social anxiety
Through touch, movement, and interaction, the project investigates how architecture
can support children's development while creating engaging and emotionally supportive
educational environments.
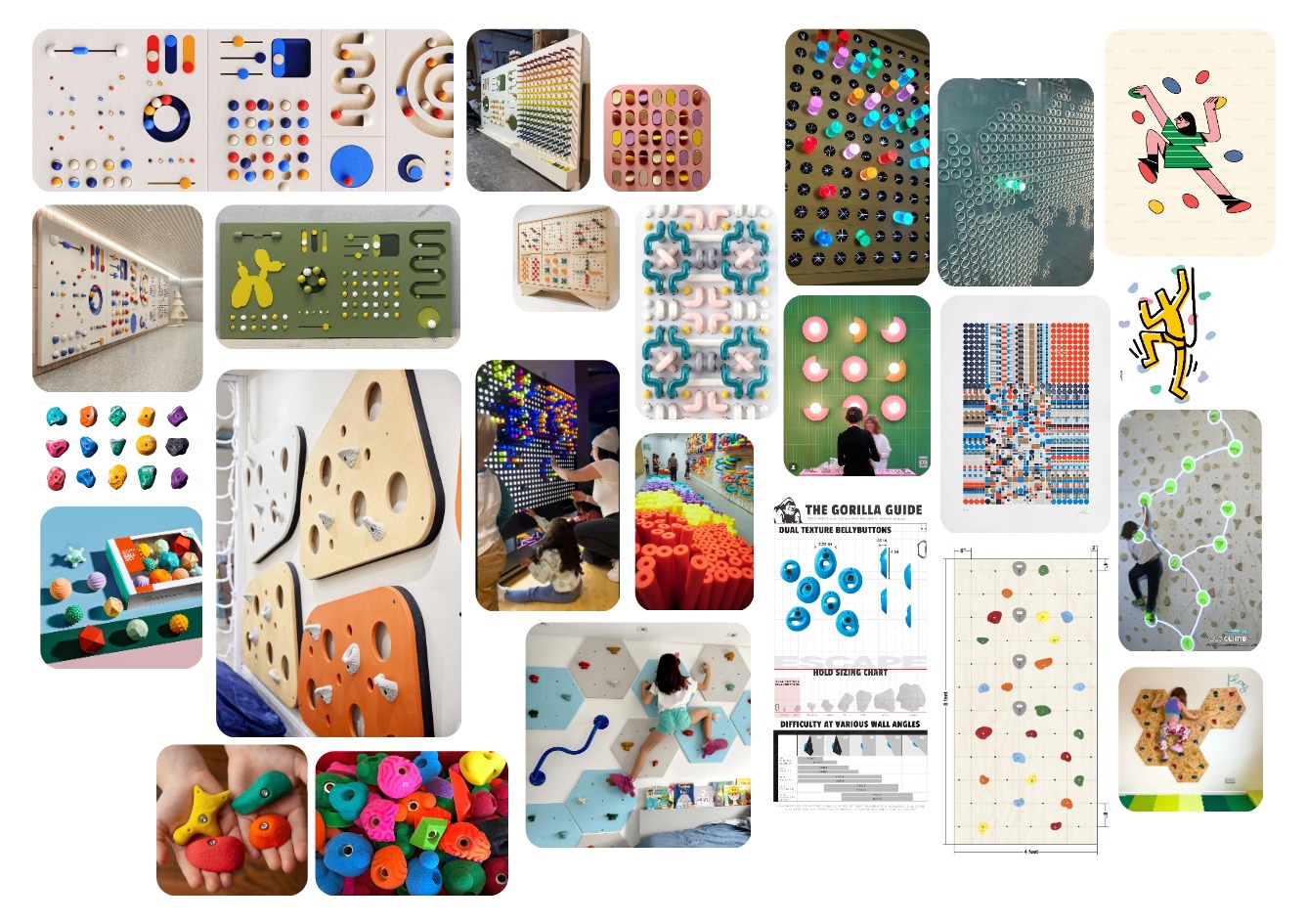
Moodboard and References
The project draws inspiration from interactive architecture, sensory environments,
playground design, climbing structures, educational installations, and projects that
encourage movement, exploration, and social engagement.
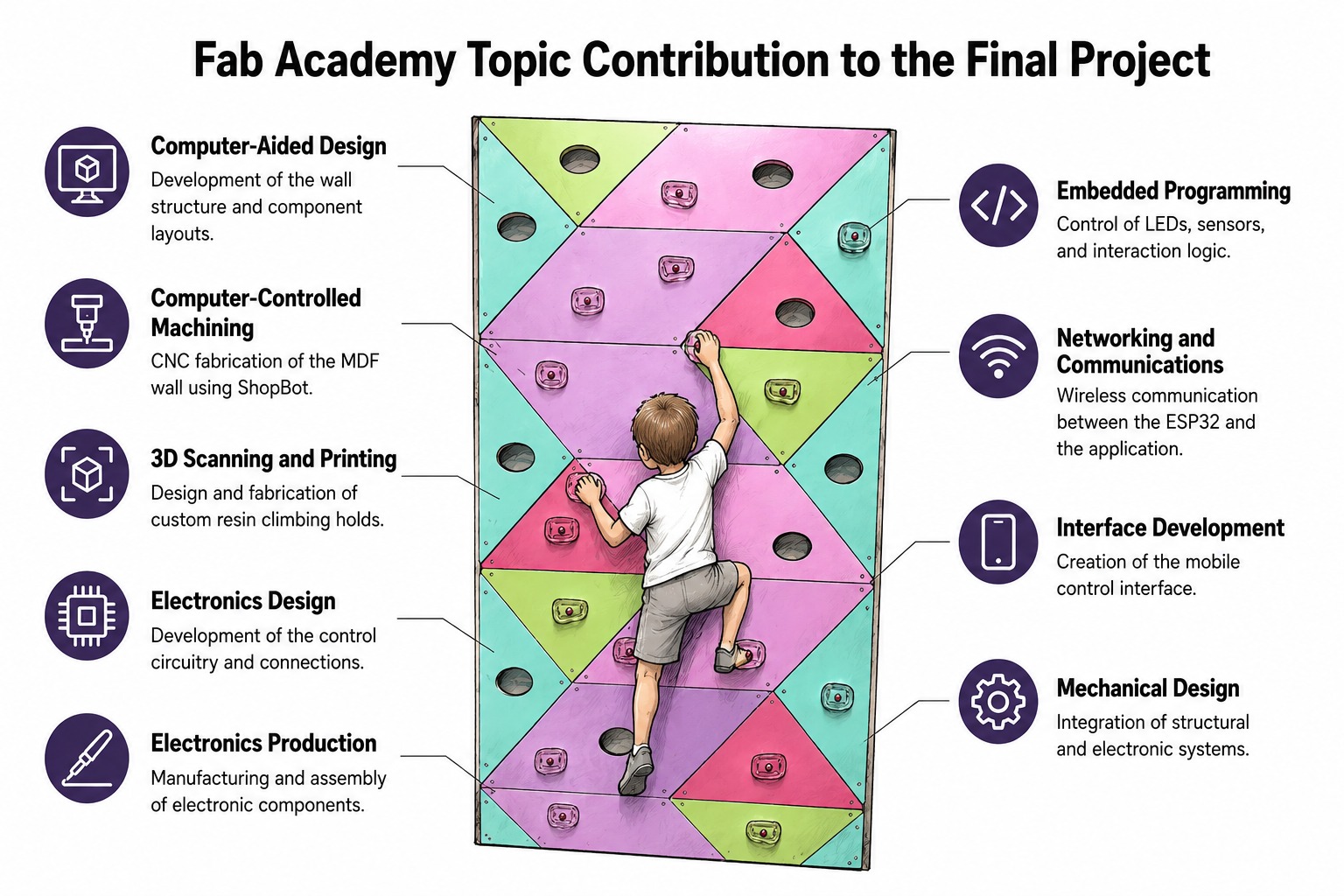
Connecting the Project with Fab Academy
One of the main objectives of the final project was to integrate the knowledge,
skills, and technologies developed throughout Fab Academy into a
single functional system.
Architecture for Emotions combines digital fabrication, electronics, programming,
interface design, networking, and rapid prototyping. Each subsystem of the project
was developed using techniques and workflows explored during different weekly assignments,
demonstrating how the Fab Academy curriculum can be applied to solve a real design challenge.
The following diagram illustrates how the final project connects with the different
Fab Academy topics and learning outcomes.
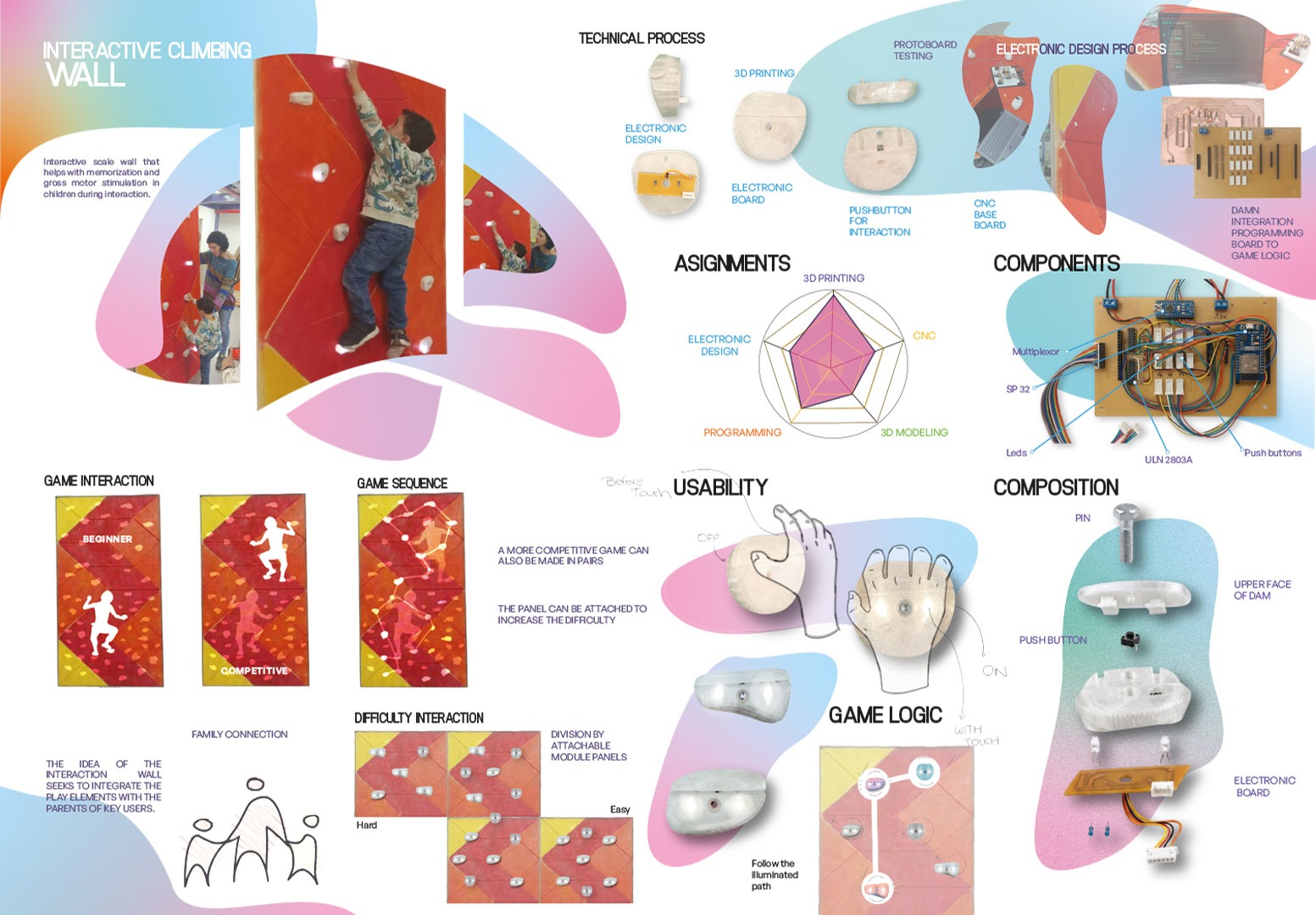
Main Project Components
To simplify the development process, the project was divided into four major
components that were designed, fabricated, and later integrated into the final system.
01
Wall Structure
CNC fabrication, assembly system, and architectural framework.
02
Interactive Holds
3D design, molds, resin casting, LEDs, and touch interaction.
03
Electronics
Custom PCBs, sensors, microcontrollers, and embedded programming.
04
Communication & App
Wireless communication, mobile application, and system control.
01 Wall Structure
Fab Academy Learning:
The wall structure combines knowledge acquired during
Week 2 – Computer-Aided Design, where the wall geometry,
pattern, and assembly strategy were developed in Rhino, and
Week 7 – Computer-Controlled Machining, where the design
was prepared and manufactured using the ShopBot CNC router.
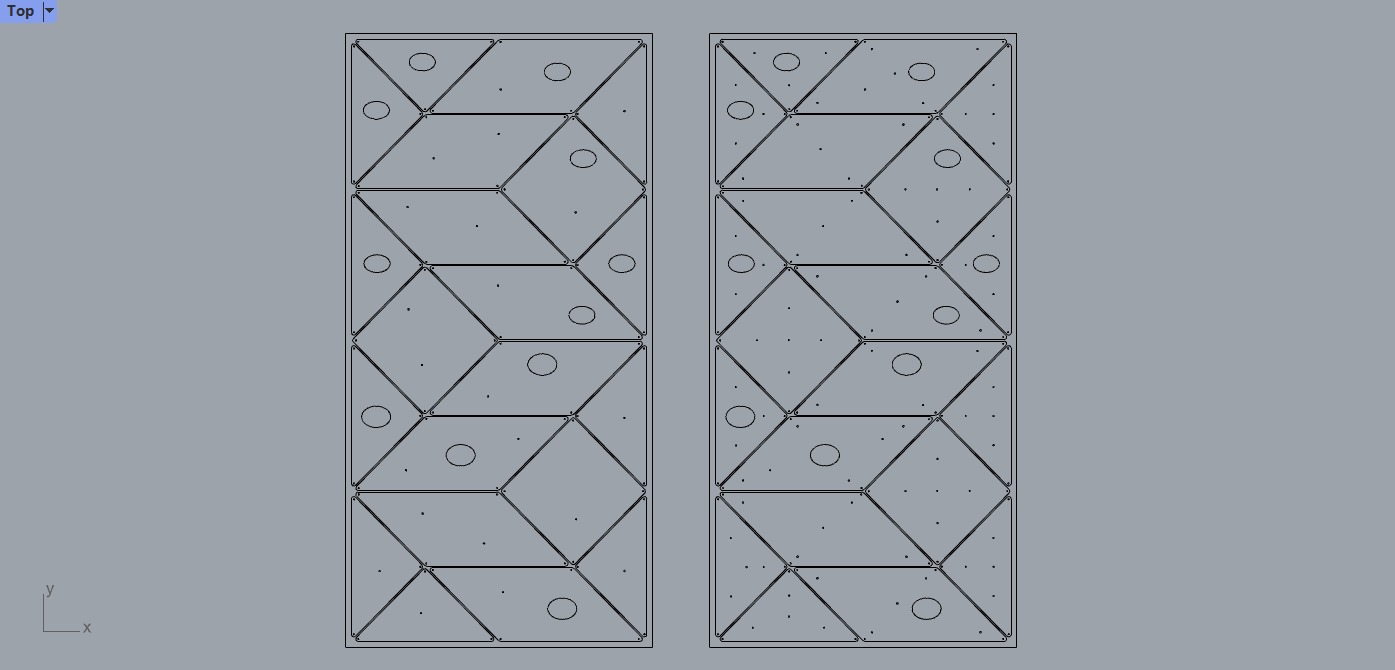
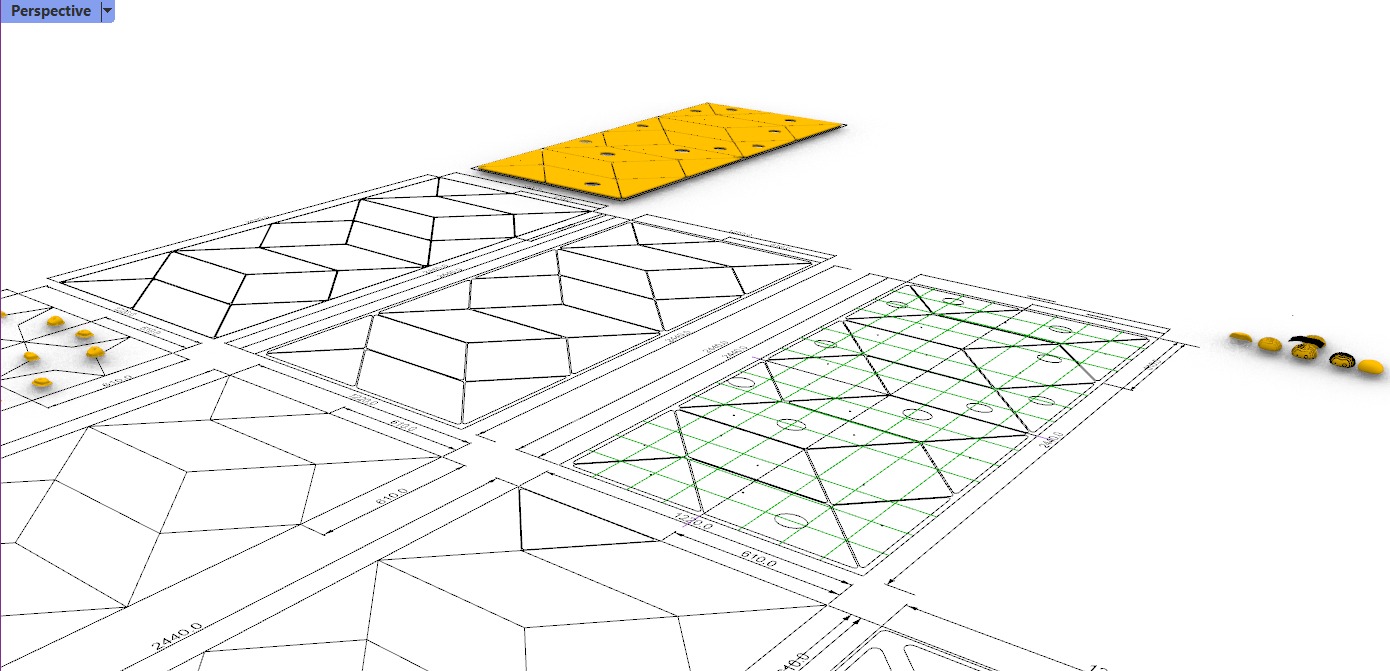
The development of the wall structure began with the digital design phase.
Initially, the geometry was intended to be drafted in AutoCAD;
however, as the project evolved, Rhinoceros 3D (Rhino) became
the main design platform due to its flexibility for both two-dimensional drafting
and three-dimensional modeling.
Using Rhino allowed the wall geometry, panel divisions,
climbing hold locations, and assembly details to be developed within a single
environment. The software made it possible to rapidly test proportions,
modify panel layouts, and visualize the overall composition of the climbing wall
before fabrication.
The design was generated using Rhino's modeling tools,
including polylines, curves, offset operations, trimming, surface generation,
and parametric adjustments. These tools enabled the creation of a geometric
pattern that simultaneously serves as the visual identity of the wall and
as a framework for the placement of climbing holds.
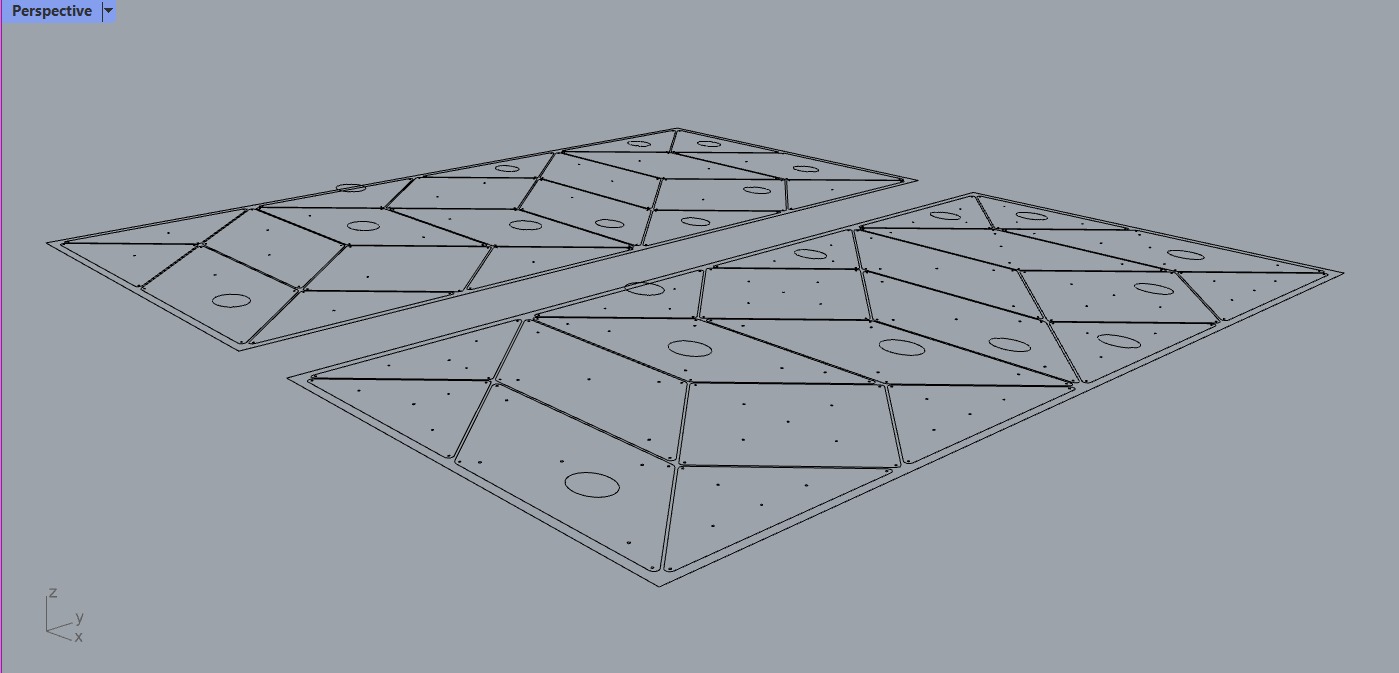
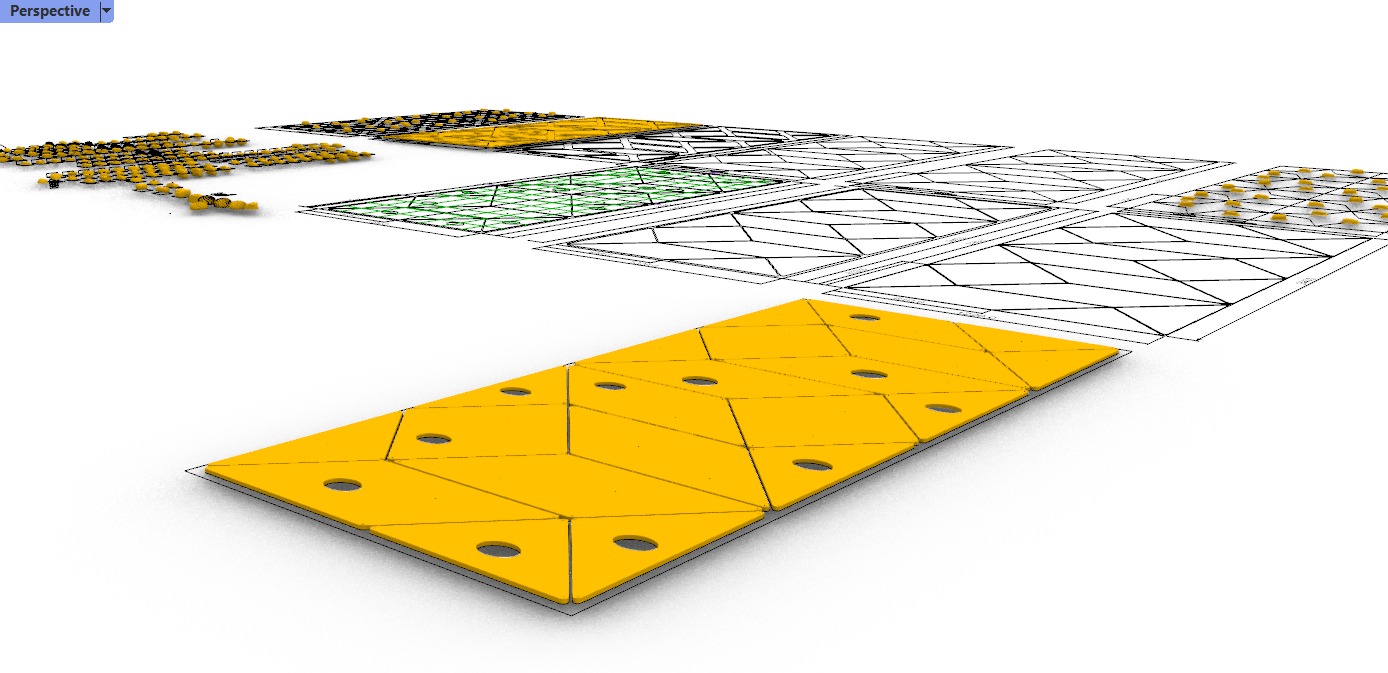
3D Modeling and System Simulation
Once the panel geometry was defined, the complete wall was assembled digitally
inside Rhino. This stage made it possible to evaluate dimensions,
component distribution, climbing hold positions, and the overall visual appearance
of the project.
Working within a single 3D modeling environment simplified
decision-making and reduced potential fabrication errors. The digital model
also helped visualize how the different modules would connect and how the final
installation would appear when assembled.
The simulation phase was especially useful for validating the placement of the
climbing holds, checking panel proportions, and understanding how users would
interact with the wall. It also allowed several design iterations to be evaluated
before moving to fabrication.
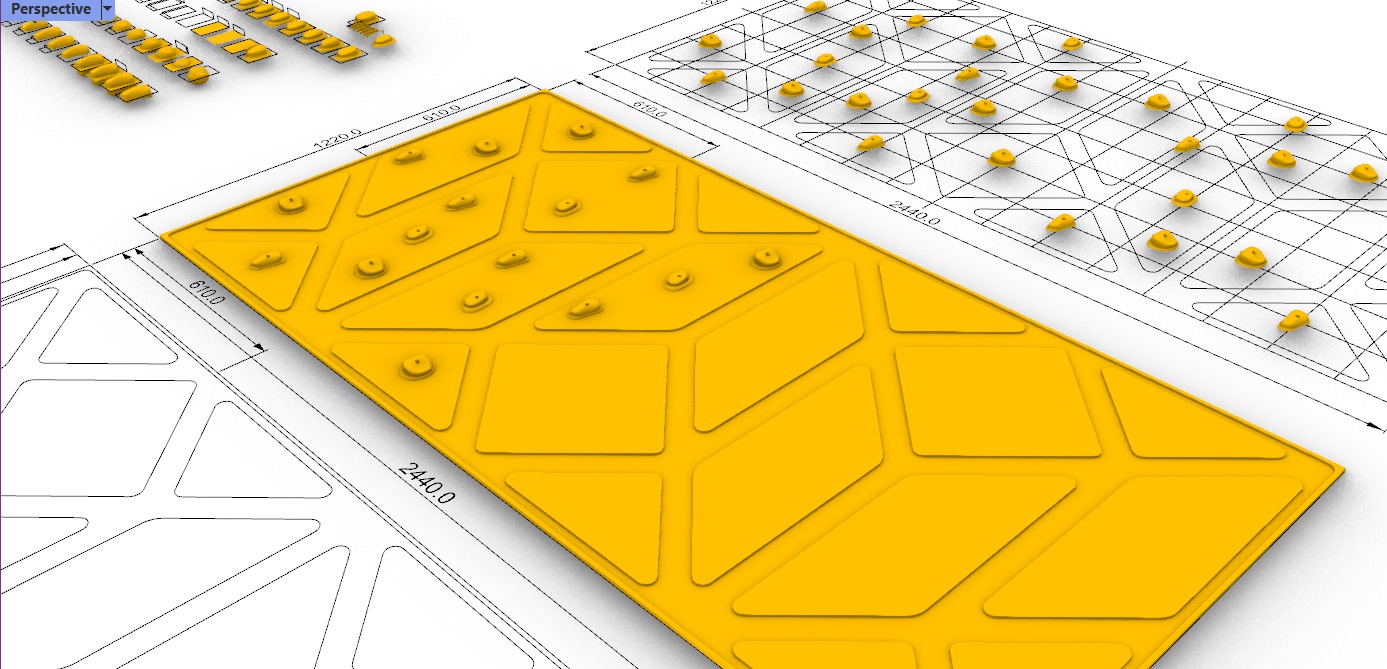
Preparation for CNC Fabrication
The fabrication of the wall structure was developed as part of the
Computer-Controlled Machining week using a
ShopBot CNC router. During the early design stages, the wall
was conceived as a series of modular panels. However, after evaluating the
assembly process and structural requirements, it was decided to manufacture
the wall as a single CNC-machined panel, simplifying fabrication
and reducing assembly time.
Once the geometry was validated in Rhinoceros 3D (Rhino),
the design was prepared for machining and exported as production-ready files.
Special attention was given to material dimensions, machining constraints,
fastening locations, and the positioning of the climbing holds.
The wall was fabricated from 18 mm plywood, providing the
structural strength required to support the climbing holds and user interaction.
A 6 mm end mill was selected for all machining operations,
allowing both cutting and engraving processes to be performed efficiently.
The decorative pattern engraved on the surface was machined with a
4 mm engraving depth, creating the visual identity of the project
while maintaining the structural integrity of the panel.
In addition to the engraved pattern, the CNC process generated the mounting
holes required for the climbing holds. Each hold is attached using a
7 mm bolt; therefore, the corresponding holes were machined
with a 7 mm diameter to ensure accurate alignment and a secure fit.
Before machining, the complete toolpath strategy was verified, including
cutting operations, engraving operations, and material optimization.
This preparation ensured accurate manufacturing while minimizing material waste
and reducing the need for adjustments during assembly.
The complete digital fabrication workflow—from design in
Rhino, through 3D simulation, and finally
CNC machining on the ShopBot—allowed the wall structure to move
seamlessly from concept to physical production.
Interactive Holds
Fab Academy Learning:
The design of the climbing holds was developed using the skills acquired during
Week 2 – Computer-Aided Design, while the fabrication strategy
was explored during Week 16 – Wildcard Week.
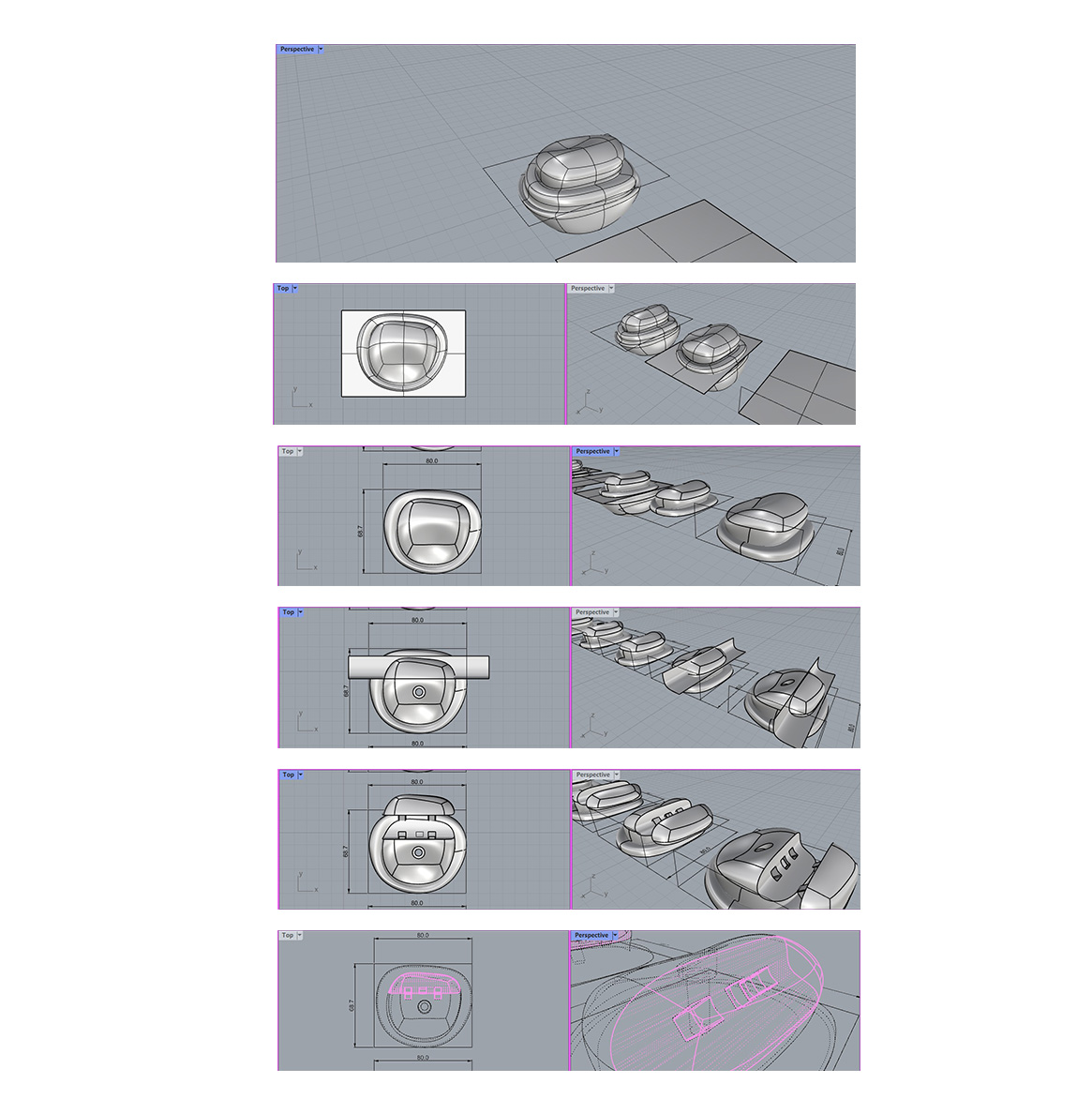
The climbing holds were digitally modeled in
Rhinoceros 3D (Rhino). Special attention was given to
ergonomics, ensuring that the shapes and dimensions were appropriate for
children between 4 and 8 years old.
Each hold was designed with approximate dimensions of
70 mm wide, 100 mm high, and a maximum
thickness of 35 mm. These dimensions provide a comfortable
grip while maintaining a safe and playful interaction.
The hold was divided into two separate parts to facilitate
the integration of the electronic components. The internal cavity houses both
the push button, which detects user interaction, and the
LED lighting system, which provides visual feedback during gameplay.
A central 7.5 mm hole was incorporated into the design to
accommodate the mounting bolt used to secure each hold to the wall structure.
The internal geometry also includes channels and spaces for routing cables
between the LEDs and the push button.
Prototype Fabrication
The initial fabrication strategy was based on
resin 3D printing, explored during
Week 16 – Wildcard Week. Resin printing offered excellent
surface quality and transparency, making it ideal for diffusing the LED light
inside each climbing hold.
However, after evaluating production costs, fabrication time, and the number
of holds required for the final installation, a different manufacturing approach
was selected.
The final holds were produced using
transparent filament 3D printing. This solution reduced costs,
accelerated production, and allowed multiple iterations to be fabricated within
the available project timeline.
To improve durability and withstand continuous use, the printed parts were
manufactured with approximately 50% infill. This increased
the mechanical strength of the holds while maintaining sufficient transparency
for the integrated lighting system.
The final result combines digital design,
electronic integration, and
additive manufacturing into a single component capable of
providing both physical interaction and visual feedback within the climbing wall.
Electronics
Fab Academy Learning
🔹 Week 6 – Electronics Design:
Design of the control system based on an ESP32 microcontroller,
multiplexers, ULN2803A drivers, LEDs, push buttons, and power distribution.
🔹 Week 8 – Electronics Production:
Manufacturing and assembly of the electronic boards, soldering of components,
system testing, and integration of the wiring required for the 16 interactive climbing holds.
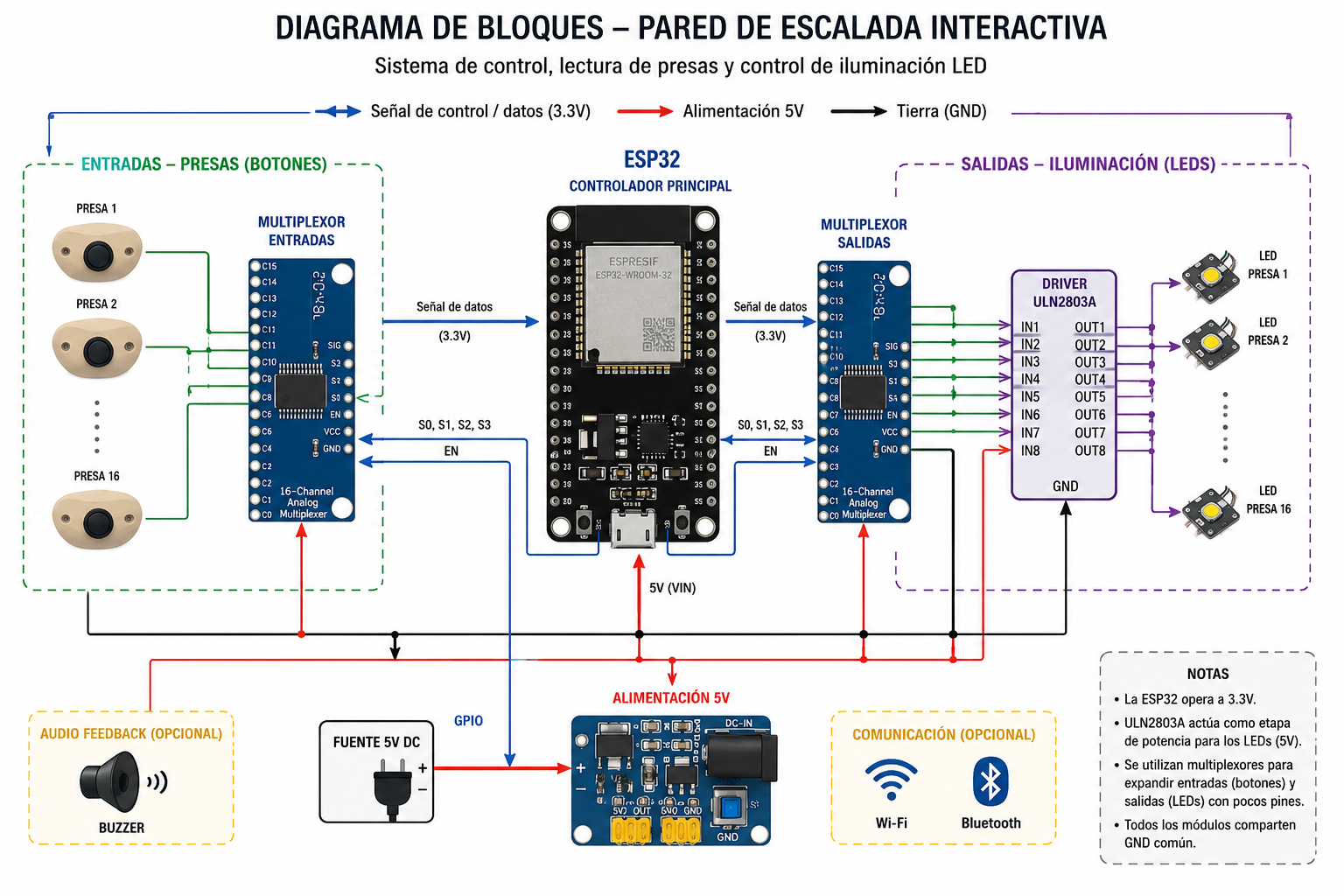
The electronic system is built around an ESP32 microcontroller,
which acts as the brain of the project. The ESP32 was selected because it provides
wireless communication capabilities, fast processing, and enough computational power
to manage the interactive functions of the wall.
The project includes 16 interactive climbing holds, each equipped
with touch detection and integrated lighting. Since the number of available input
and output pins on the ESP32 is limited, additional circuitry was required to handle
all the signals efficiently.
To solve this challenge, the system incorporates two multiplexers.
These components allow multiple signals to be managed using a reduced number of
microcontroller pins, making it possible to monitor all climbing holds while keeping
the electronic architecture simple and scalable.
In addition, the design includes two ULN2803A driver ICs.
These integrated circuits amplify and distribute the signals coming from the
multiplexers, ensuring reliable operation across all interactive elements of the wall.
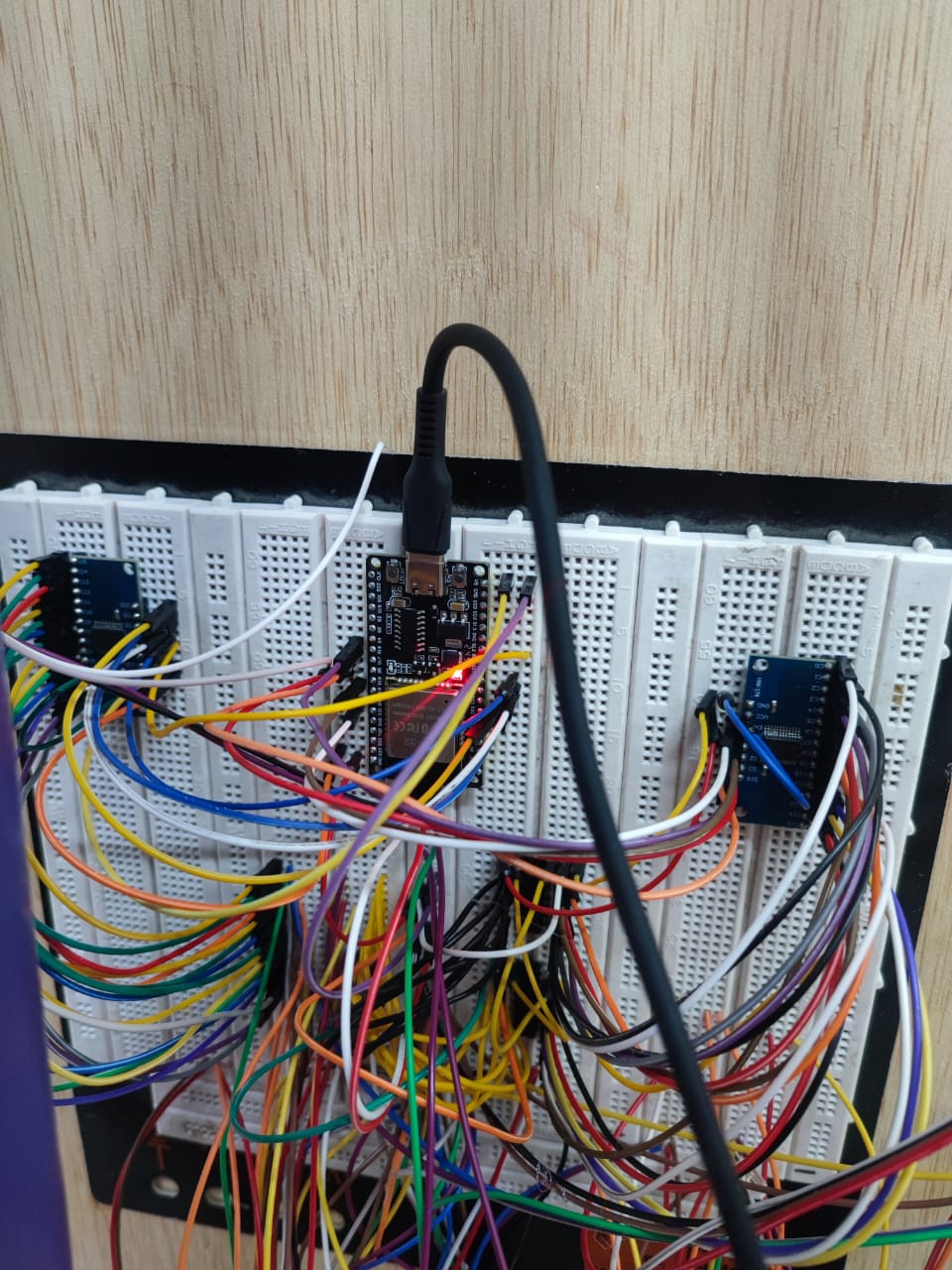
The photographs shown above correspond to the prototype stage on a breadboard.
This setup was used to validate the complete electronic architecture before manufacturing
the final boards. During this phase, the ESP32, multiplexers, LEDs, push buttons, and
power distribution system were tested to ensure that all components communicated correctly.
Once the electronic system was fully validated, the circuits were transferred to custom
PCB designs. The main control board was then fabricated using a
CNC PCB milling machine, allowing precise production of the electrical traces.
After machining, all electronic components were soldered and tested individually before
integration into the wall.
In addition to the main control board, 16 individual boards were produced
for the climbing holds. Each board contains the electronic components required for a single hold,
including the LED lighting system and the push button sensor
that detects user interaction.
This modular approach simplified assembly, maintenance, and future replacement of individual
components while ensuring consistent performance across all interactive climbing holds.
The lighting system is powered by an external 5V power supply.
A dedicated power source was necessary because the LEDs require more current than
the ESP32 can safely provide.
Each climbing hold contains two high-power 5V LEDs, which provide
the visual feedback required during the different game modes. These LEDs illuminate
the holds, indicate active positions, and guide users through the interaction process.
All electronics and wiring are located on the back side of the wall,
keeping the installation hidden from view and protecting the components during use.
This approach also improves the visual appearance of the project and simplifies maintenance.
Each climbing hold is connected using four wires:
GND – common ground connection.
Button signal – detects when a user presses the hold.
LED signal – controls the illumination system.
5V power – provides electrical power to the hold.
The final electronic architecture combines the ESP32,
multiplexers, ULN2803A drivers,
high-power LEDs, and an external power supply
into a single integrated system capable of controlling all interactive elements
of the wall while maintaining reliable performance and future scalability.
Communication & App
Fab Academy Learning:
The communication system was developed using the knowledge acquired during
Week 14 – Networking and Communications and
Week 15 – Interface and Application Programming.
The final component of the project is a custom
control application developed to manage the interactive climbing wall.
The application allows teachers, therapists, or facilitators to create and control
different activities directly from a computer.
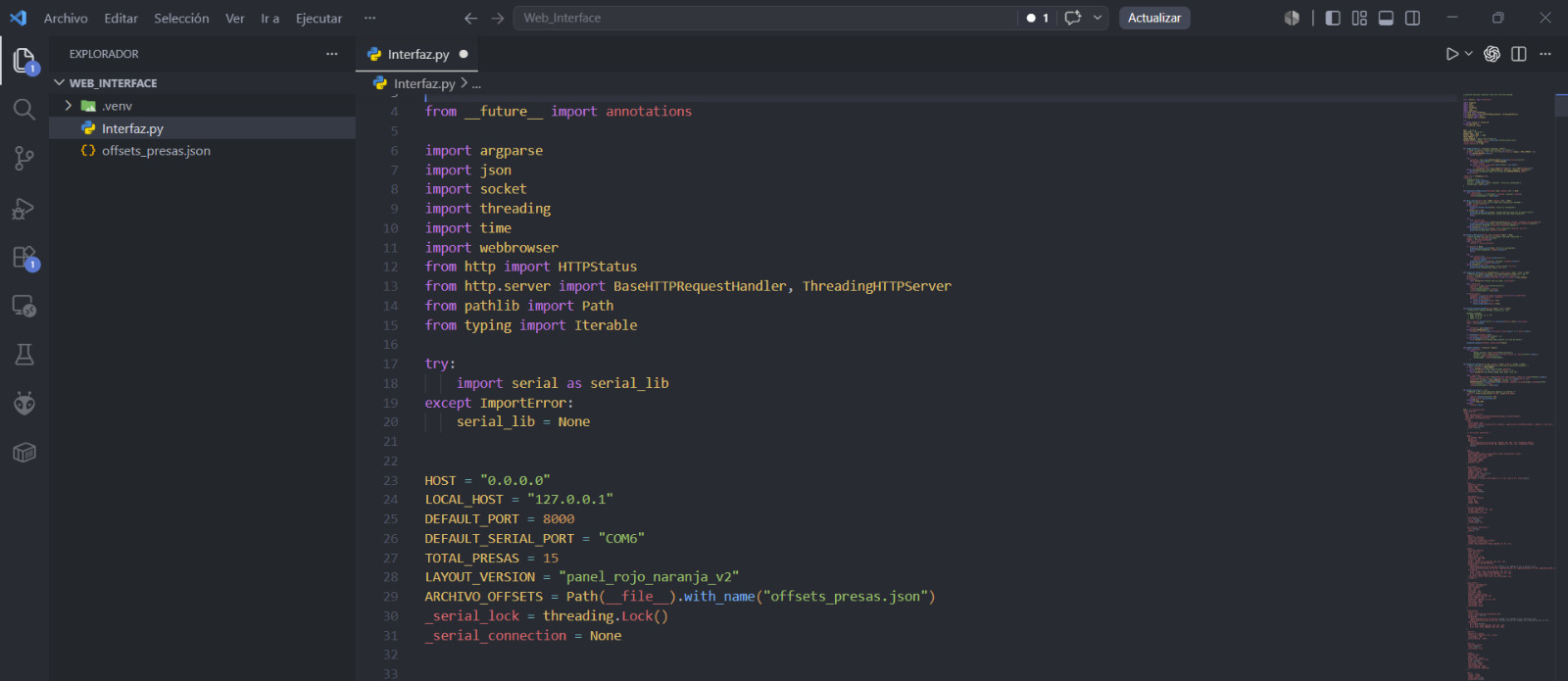
The interface was programmed using Python, providing a flexible
and customizable environment for communication between the user and the wall.
This approach allowed rapid development while maintaining the possibility of future
updates and new game modes.
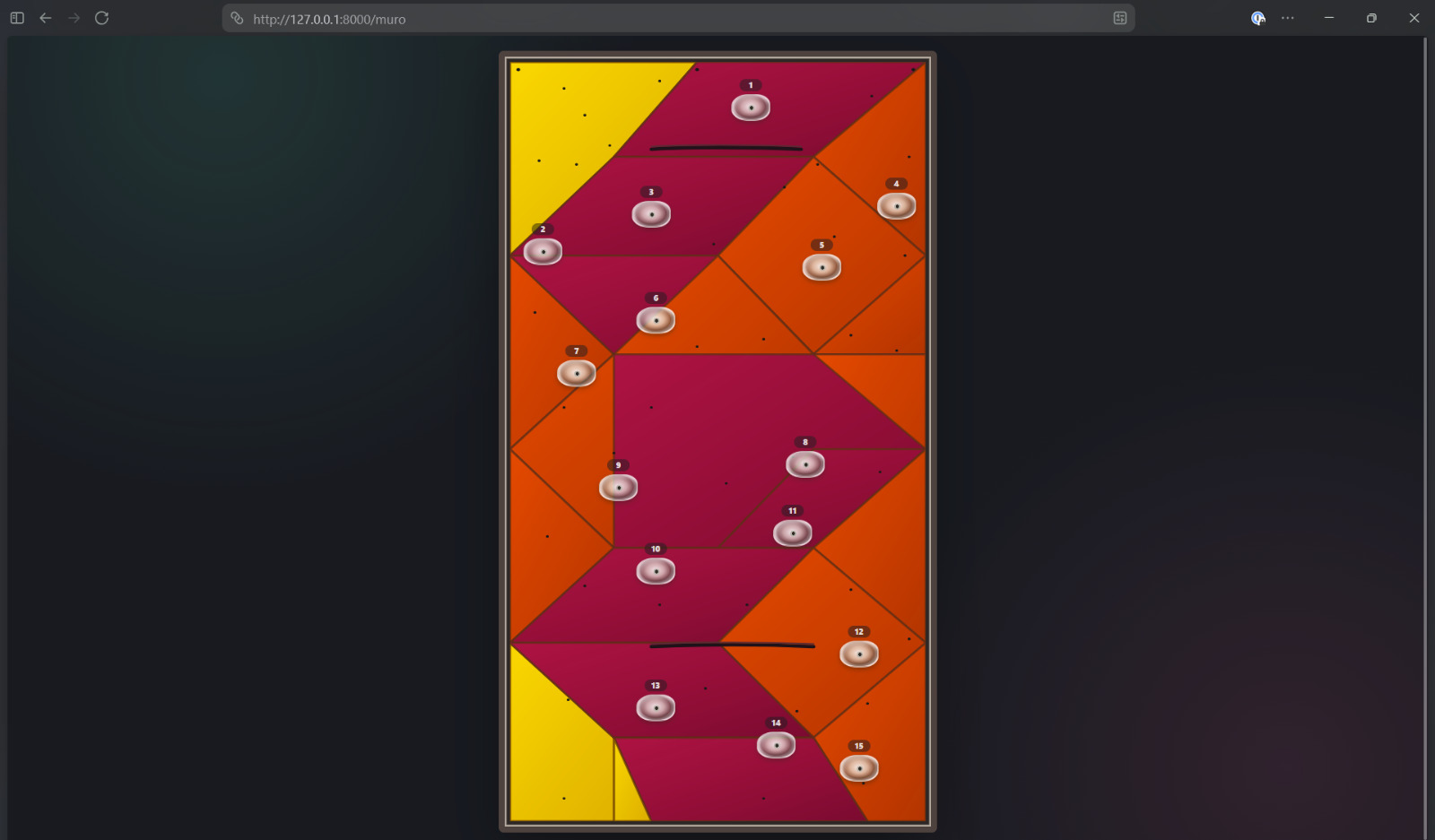
The application displays a digital representation of the climbing wall,
where each hold can be individually identified and controlled.
This visualization makes it possible to select specific holds and create
custom sequences adapted to different learning activities.
Once a sequence is selected, the information is sent to the
ESP32 microcontroller, which activates the corresponding LEDs
on the wall. The child must then observe the illuminated pattern, memorize the
sequence, and reproduce it by pressing the correct climbing holds.
The interface also includes calibration tools that allow the position of each
hold to be adjusted digitally. This feature was particularly useful during
system testing, ensuring that the virtual representation matched the physical
installation accurately.
Communication between the application and the electronic system takes place in
real time, allowing immediate feedback during gameplay and simplifying the
configuration process.
System Integration
The application acts as the bridge between the user and the physical installation.
It connects the digital interface, the communication network, the ESP32 controller,
the electronic boards, and the illuminated climbing holds into a single integrated system.
By combining Python programming,
network communication,
embedded electronics, and
interactive architecture, the project transforms a conventional
climbing wall into an intelligent environment capable of supporting memory,
movement, learning, and emotional engagement.
Communication & App
Fab Academy Learning: The communication system was developed using the knowledge acquired during
Week 14 – Networking and Communications and
Week 15 – Interface and Application Programming.
To control the interactive climbing wall, a custom web application was developed using Python.
The application acts as the main interface between the user and the physical installation,
allowing routes, activities, and game sequences to be configured in real time.
The system was developed using a local Python server, which provides a web-based interface
accessible from a computer, tablet, or mobile device through a web browser. This approach
eliminates the need for dedicated software installation and simplifies future updates.
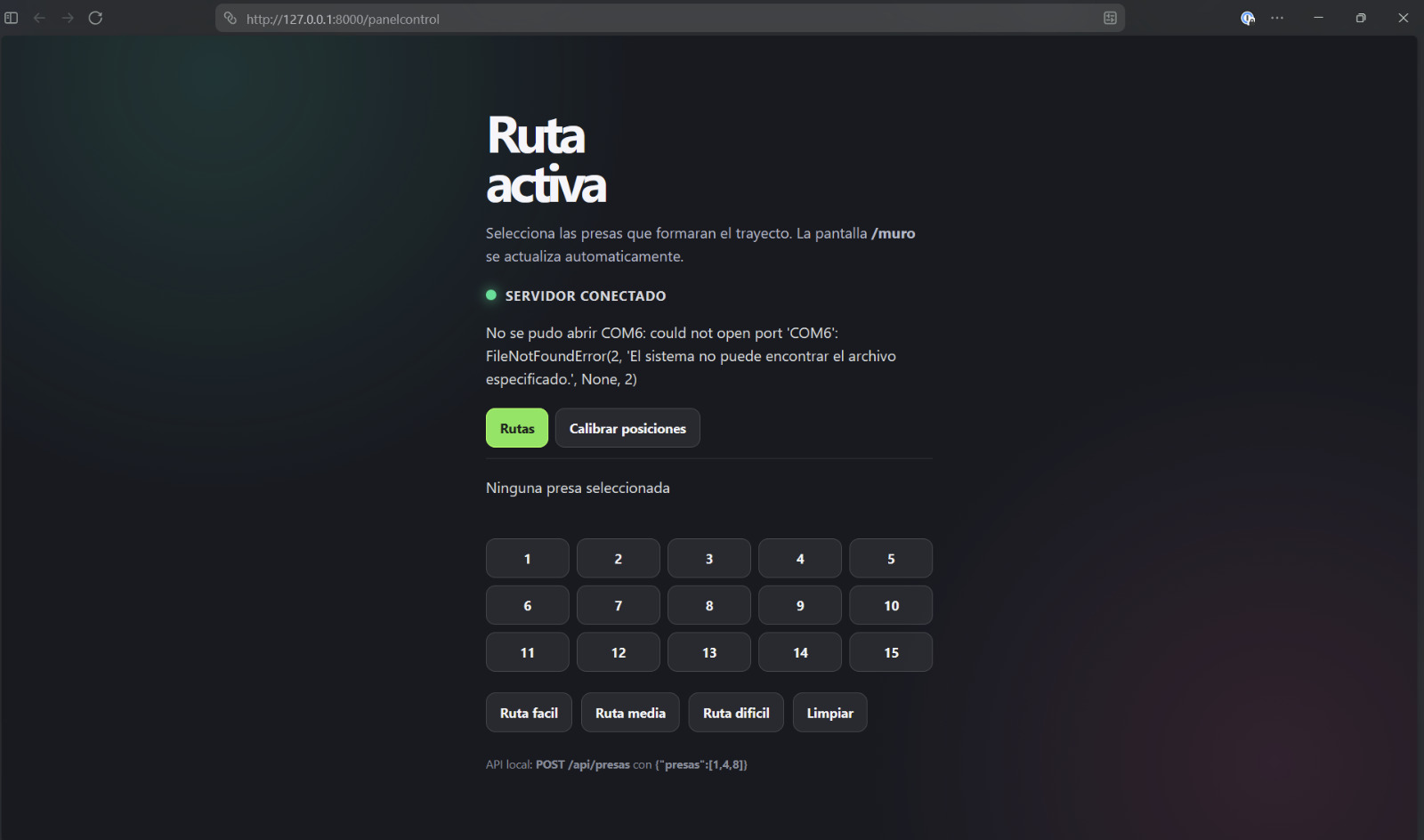
The first interface, called Control Panel, allows the user to manage the wall
and create climbing routes. Through this panel, individual climbing holds can be selected manually,
generating custom routes adapted to different learning activities and difficulty levels.
The interface also includes predefined route options such as Easy, Medium, and Difficult,
enabling rapid activity setup.
Additionally, a calibration mode was implemented to adjust the digital position of each climbing hold.
This tool was particularly useful during the integration process, ensuring that the virtual
representation accurately matched the physical installation.
The second interface displays a digital representation of the climbing wall. Each climbing hold
is positioned according to its real location on the wall, creating a visual twin of the physical system.
Whenever a route is selected from the control panel, the wall visualization updates automatically,
allowing the operator to verify the selected sequence before sending it to the hardware.
Communication between both interfaces is handled through a local API developed in Python.
When a route is created, the selected hold numbers are transmitted to the ESP32 microcontroller.
The ESP32 then activates the corresponding LEDs installed inside the climbing holds.
During gameplay, children must identify the illuminated holds, memorize the sequence,
and physically interact with the wall by pressing the correct climbing holds.
The integrated push-button sensors detect the interaction and send feedback to the electronic control system.
The application serves as the central communication layer of the project, connecting the graphical interface,
network communication, embedded electronics, and interactive architectural installation into a single integrated system.
By combining Python programming, real-time communication, and digital fabrication technologies,
the project transforms a conventional climbing wall into an intelligent educational environment that promotes movement,
memory, learning, and emotional engagement.
Project Conclusions
The Interactive Climbing Wall successfully transformed a traditional climbing activity into an intelligent educational environment that combines
physical movement, memory training, and digital interaction.
The project demonstrated how architecture can become an active participant in the learning process, encouraging children to engage not only with a physical structure but also with a digital interface that allows them to create their own challenges and personalized routes.
Key Achievement
The most valuable outcome was the integration between the interactive wall and the Python control application. Children were not limited to following predefined activities; they could create their own routes, define challenges, and adapt the experience to different difficulty levels.
User testing produced unexpected but positive results. The wall was originally designed for individual interaction; however, children aged
4 and 7 years old naturally started playing simultaneously, creating collaborative and competitive dynamics that had not been anticipated during the design phase.
The project confirmed that architecture, electronics, programming, and digital fabrication can be combined into a single system capable of promoting
learning, movement, social interaction, and emotional engagement.
Challenges & Difficulties
Python Development
The development of the control application in Python represented one of the greatest challenges, as programming is a field far removed from my architectural background. Learning server communication, interfaces, and application logic required significant effort throughout the project.
Wall Scale
The large dimensions of the climbing wall presented fabrication and assembly challenges. The final prototype was developed as a single CNC-machined piece rather than a fully modular structure.
Interactive Holds
The original plan was to manufacture the holds using transparent resin printing. However, the production cost was too high for the required quantity, leading to the use of transparent filament printing as a more practical solution.
Future Opportunities
Development of a fully modular wall system for easier transportation and assembly.
Creation of additional educational and collaborative game modes.
Implementation of user profiles, scores, and performance tracking.
Adaptive difficulty levels according to age and learning objectives.
Expansion of testing with larger groups of children.
Improved materials and manufacturing methods for the interactive holds.
Final Reflection
The project evolved beyond an interactive climbing wall. It became a platform that combines
architecture, play, learning, electronics, programming, and digital fabrication
into a single educational experience capable of adapting to different ages and future developments.