12 Mechanical design
Reflection
In this mechanical design project, we first conducted several rounds of brainstorming, with the goal of creating a "machine for lazy people." Initial ideas included a water shortage reminder device for plants (using a spring to pull a sign), a vibrating mechanism to make the plant pot shake, and a catapult device that could launch a "please water me" message. Later, we considered making a delivery pickup robot. However, after rapid prototyping and discussion, we realized it required visual recognition and a complex control system, its functions were too complicated and deviated from the core mechanical automation focus of this assignment.
In the end, we chose the drawing machine as our direction, with each person responsible for a different part. My focus was on optimizing the wire management structure, mainly because the on-site wiring was too messy.
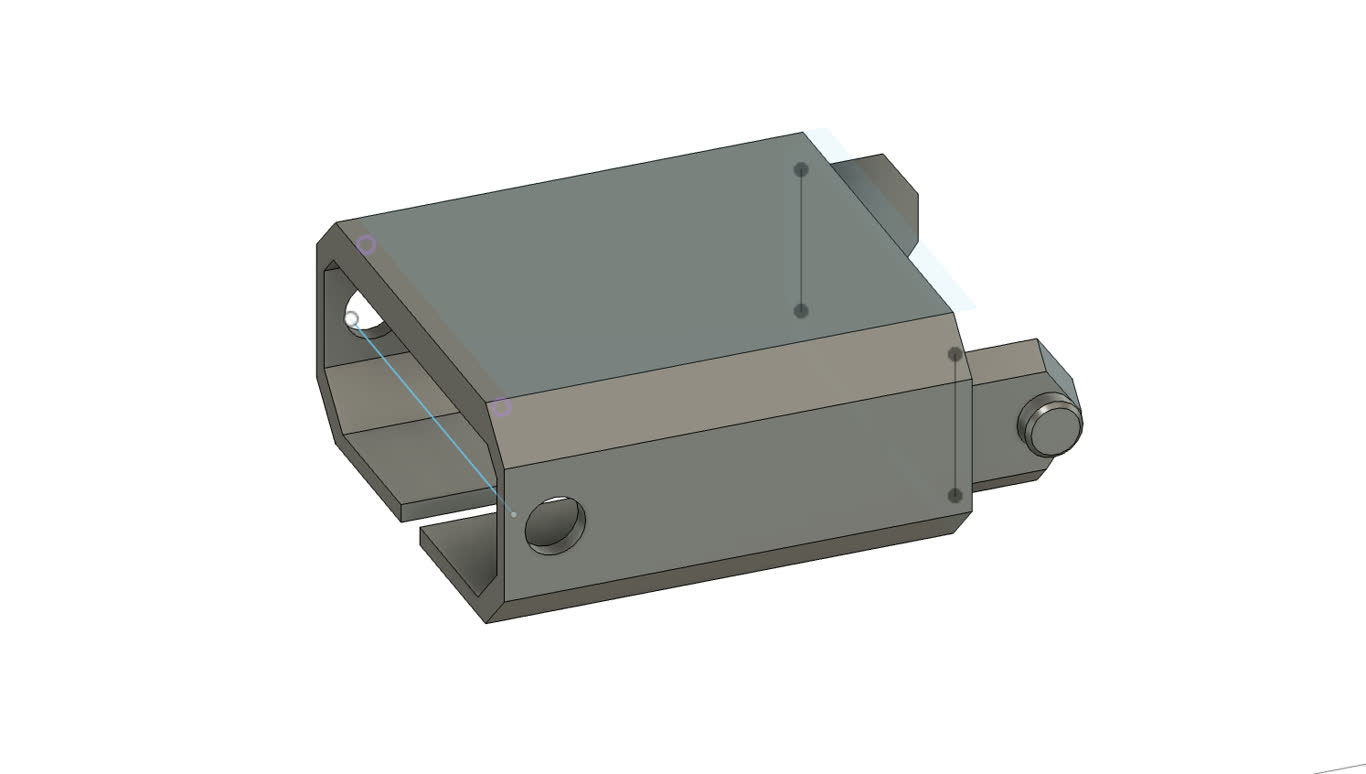
To solve this problem, I designed a wire holder connected to the motor. Starting with Version 0, I quickly found that it could only rotate left and right, which couldn't adapt to the direction of movement. So I iterated to Version 1, which was basically functional, but during machine assembly I discovered that the rotation angle was insufficient. Then I made Version 2, which had a larger angle, followed by Version 3, which further increased the angle.
Through physical testing of these three versions, I clearly saw a trade-off:
-
Version 1 was the strongest but had a limited angle.
-
Version 2 offered a good balance between strength and angle.
-
Version 3 had the largest angle but was the most fragile.
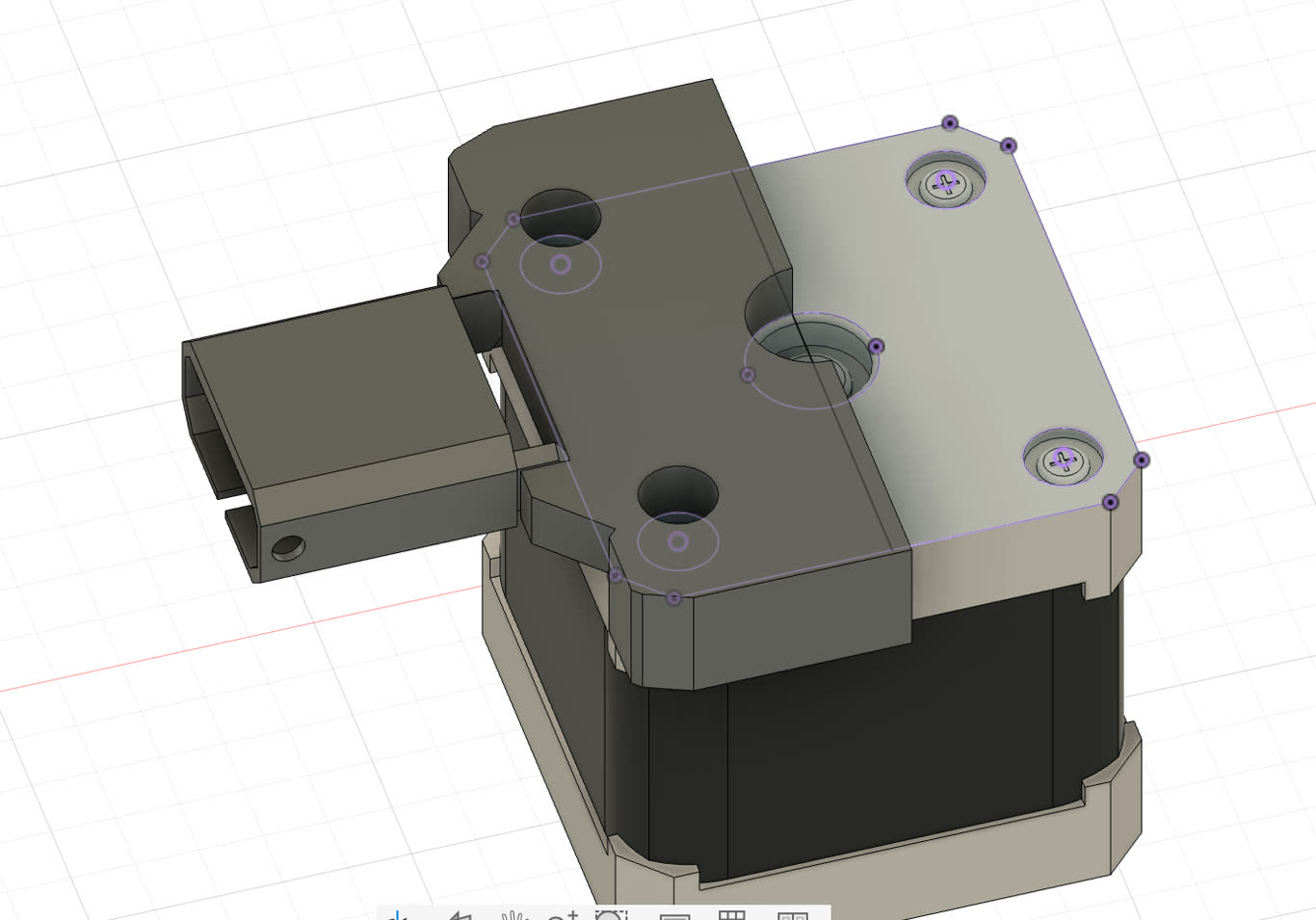
In practice, these three versions can be mixed depending on the needs of different positions. I also designed a motor cap to work with the wire holder, making the connection more stable.
This experience taught me that there is rarely a perfect one-shot solution in mechanical design. Repeated prototyping, assembly testing, identifying problems, and making improvements is an essential process. There are often trade-offs between angle, strength, and reliability, and the real answer comes from hands-on validation. If I improve it further in the future, I will try to combine the advantages of all three versions into a modular wire holder that can be quickly swapped based on different scenarios.
Group Assignment
Group documentation click here
Team member
- Yaroslav Artsishevskiy - Idea, documenters, Electrical design
- James Stewart - Assembling and testing, poster designer
- Winnie Sun - Project organizer, video editting
- Yanfeng Li - Arduino board containor 3D modeling
- Zequan Lin (me) - Accessory Design (Protect wires) ↓↓↓
Individual Assignment
Idea iteration
Brainstorm: a machine for lazy people.
- Watering plant
Plant Self-Petitioning System: When the soil dries out, the circuit is disconnected, the electromagnet stops working, and a spring is released. The spring pulls a rope, and the other end of the rope is tied to a small wooden sign. The sign pops out from behind the pot and reads "Thirsty! Please water me now!"
Shaking plants: Place the flower pot on a base with a spring mechanism. On the side, install a small motor and an eccentric wheel (like the one in a mobile phone vibrator). When the humidity sensor is triggered, the motor starts and the entire flower pot begins to tremble slightly. When you pass by and see it "shaking", you will know it is "cold" or "afraid" - in fact, it is just thirsty.
Emergency Signal Transmitter: Use a catapult device (such as a rubber band or a compression spring) to fix a small piece of paper near the flower pot. When the soil dries out, it will trigger and the catapult device will shoot the paper to the path you often walk on. The paper contains the message "Water!!!" or has a sad face drawn on it. The plant has sent you a physical text message.
- Take delivery
a moving machine that transfer somthing: Tars (Interstellar Robot)
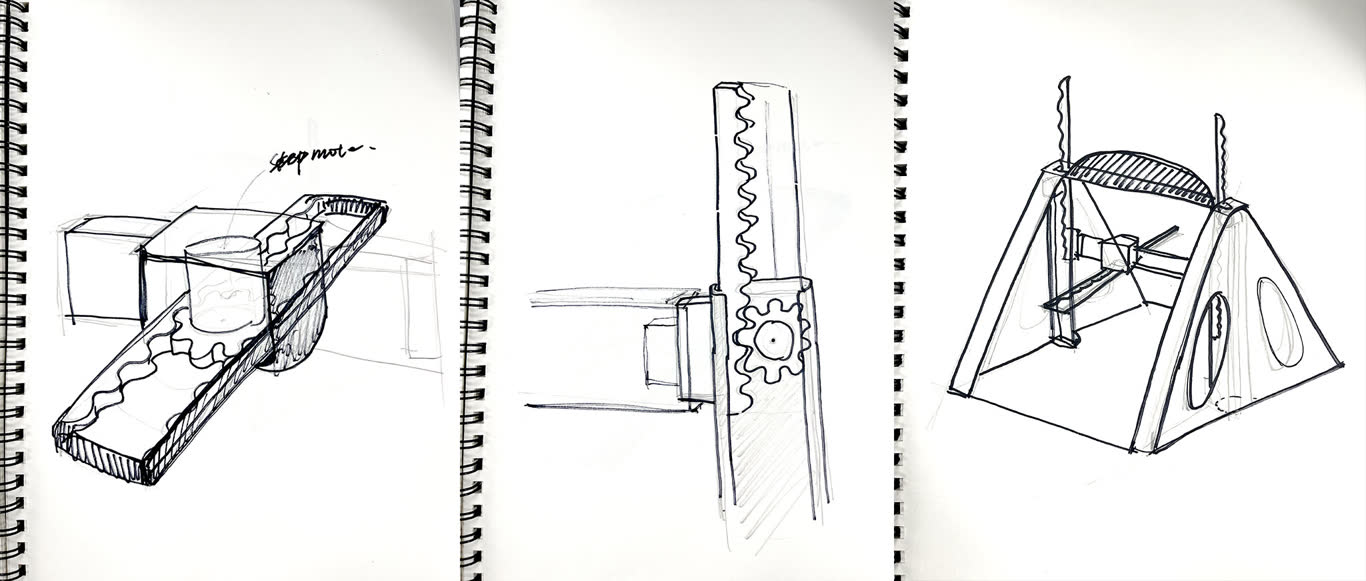
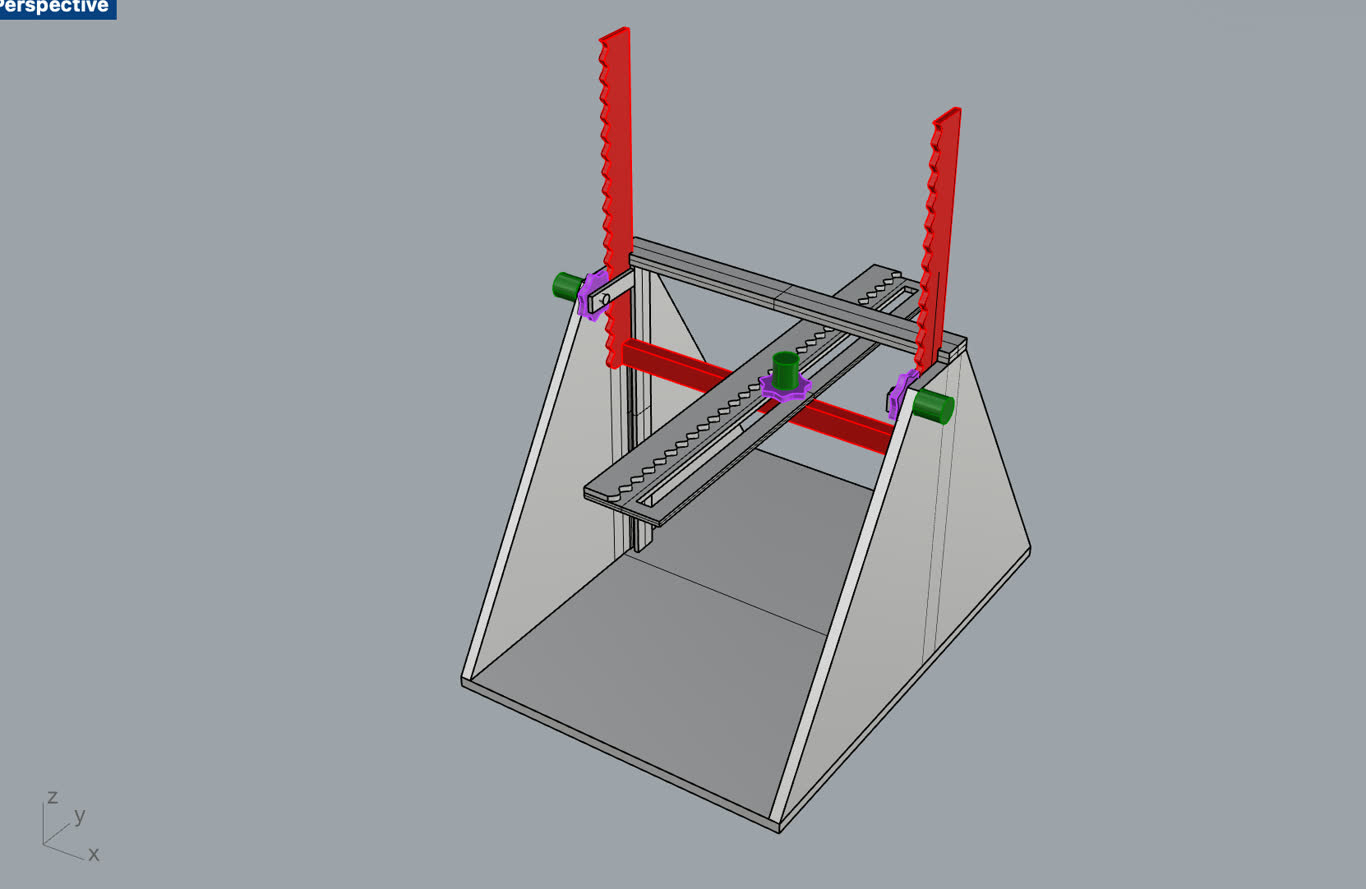
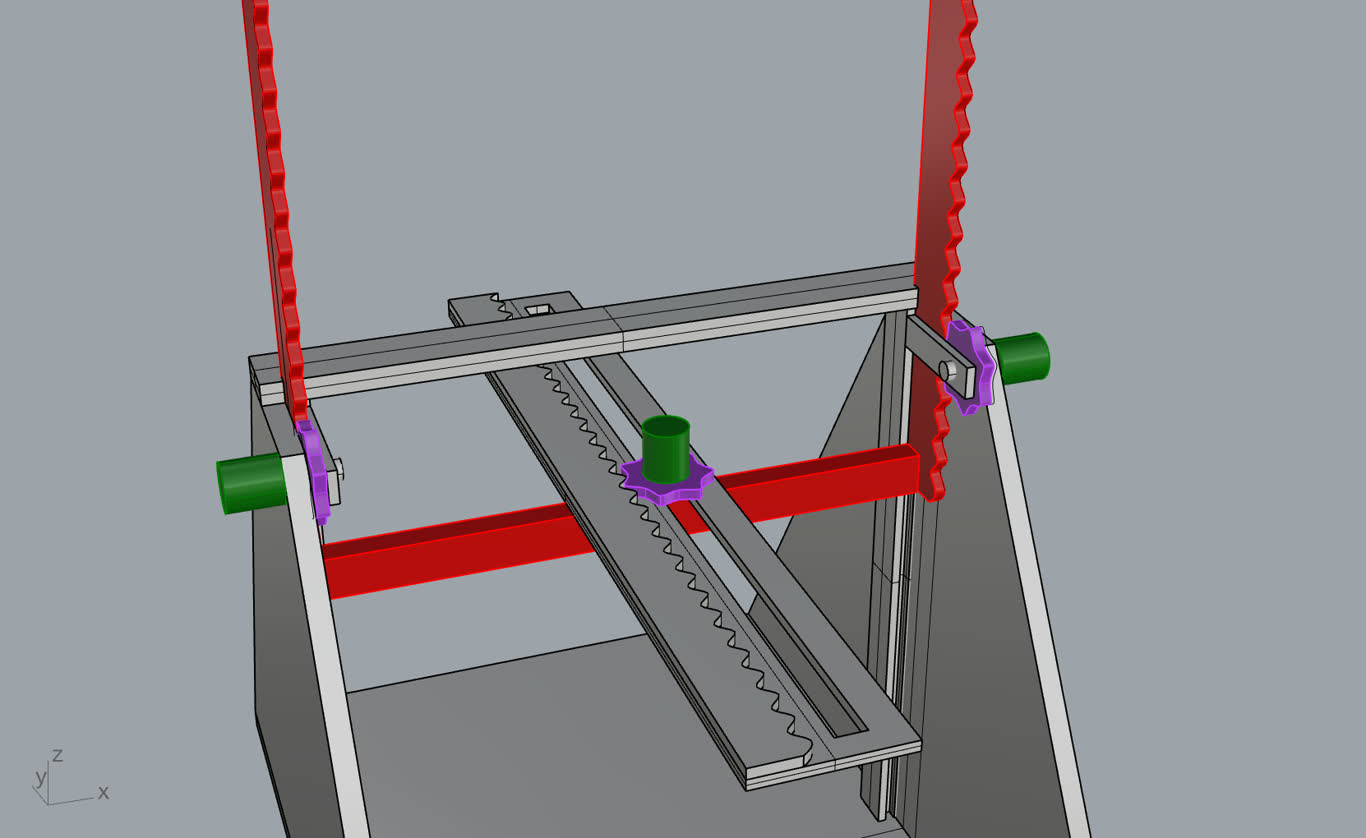
The reason for not continuing the design: It has complex and diverse functions. The upper part is a crane with two-axis movement, and the lower part is a tank track. The functional requirement is to automatically identify and pick up express packages, which involves visual recognition and other technologies. It does not quite meet the requirements of mechanical automation. The functions are complex and unnecessary.
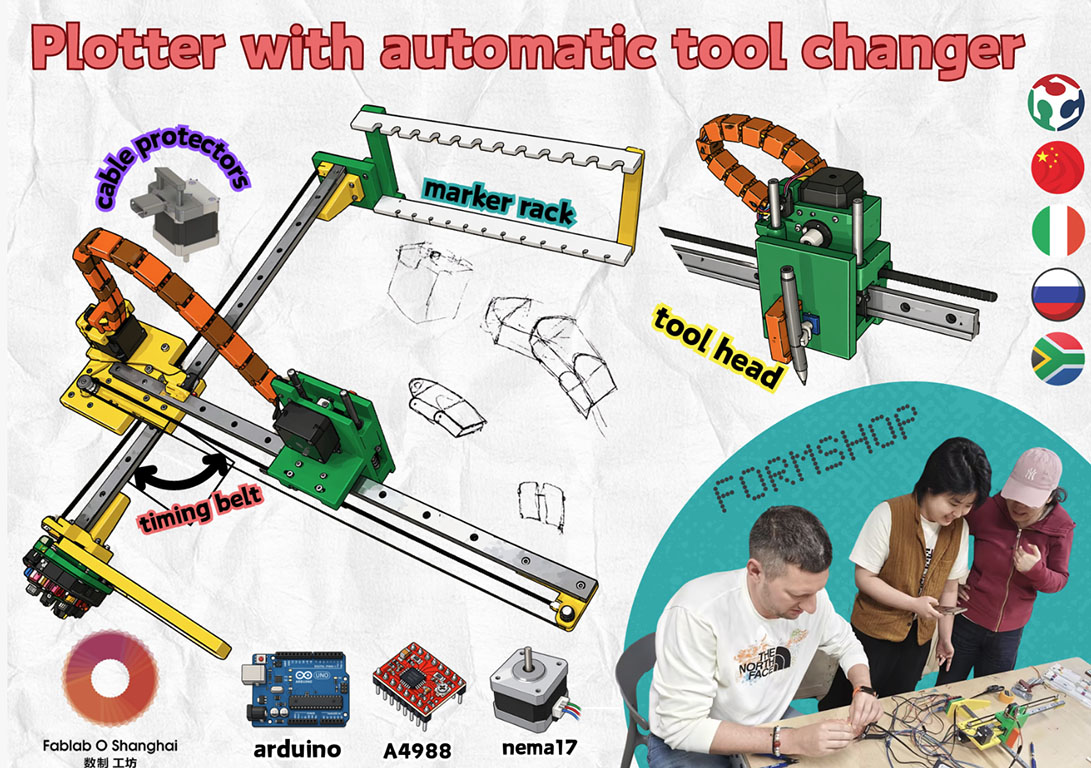
- Drawing machine
Final choice >>>>>>>>
Drawing machine
Issue: wires are too messy.
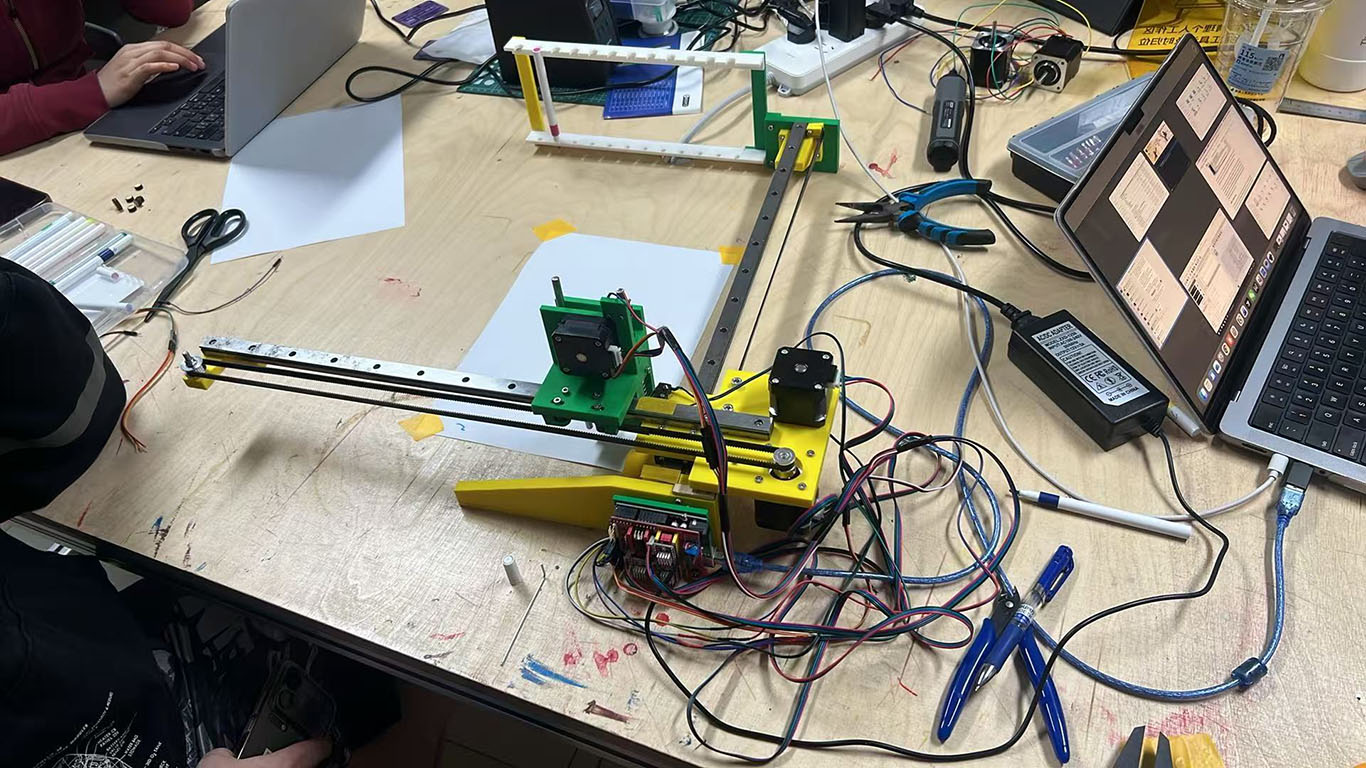
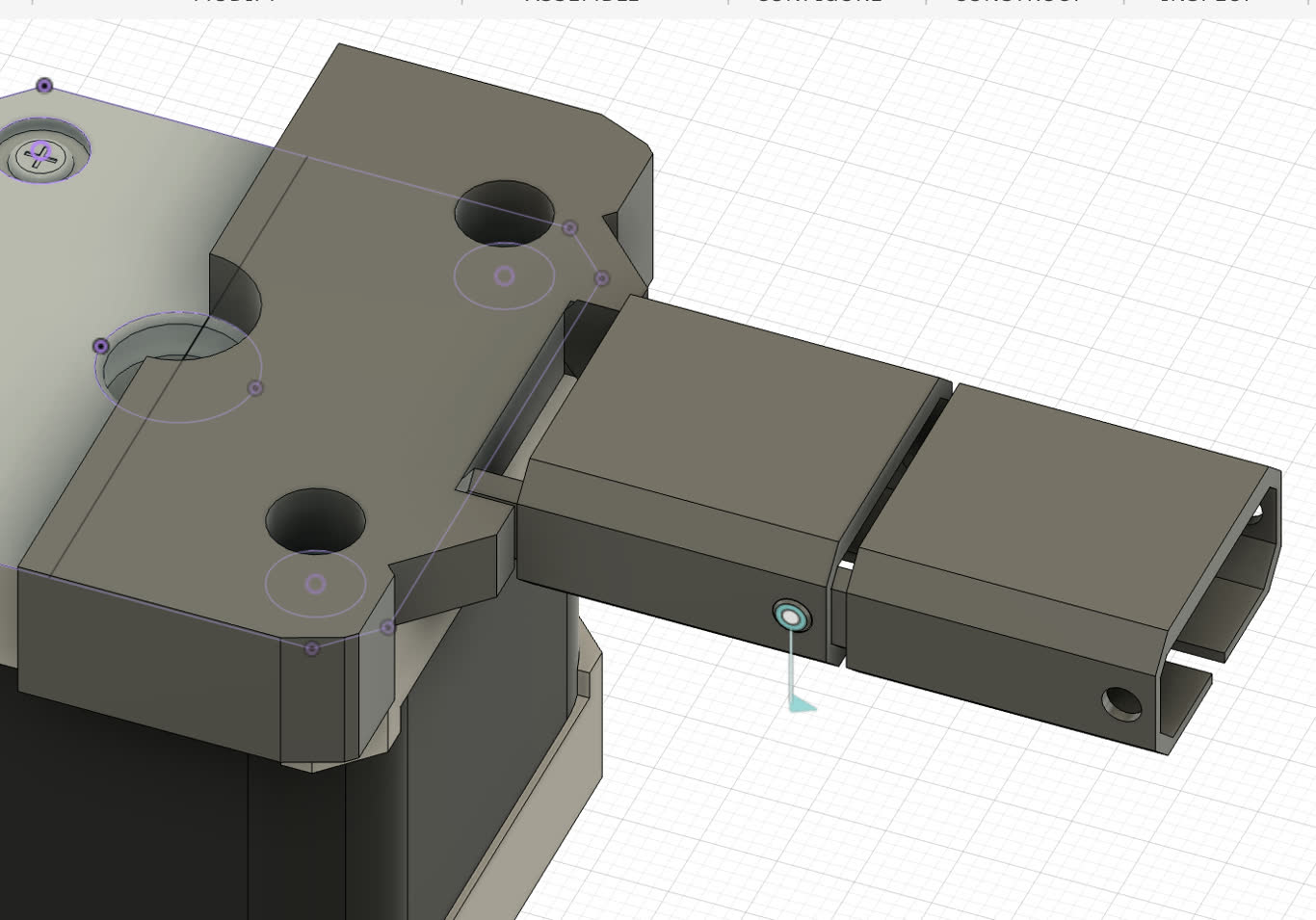
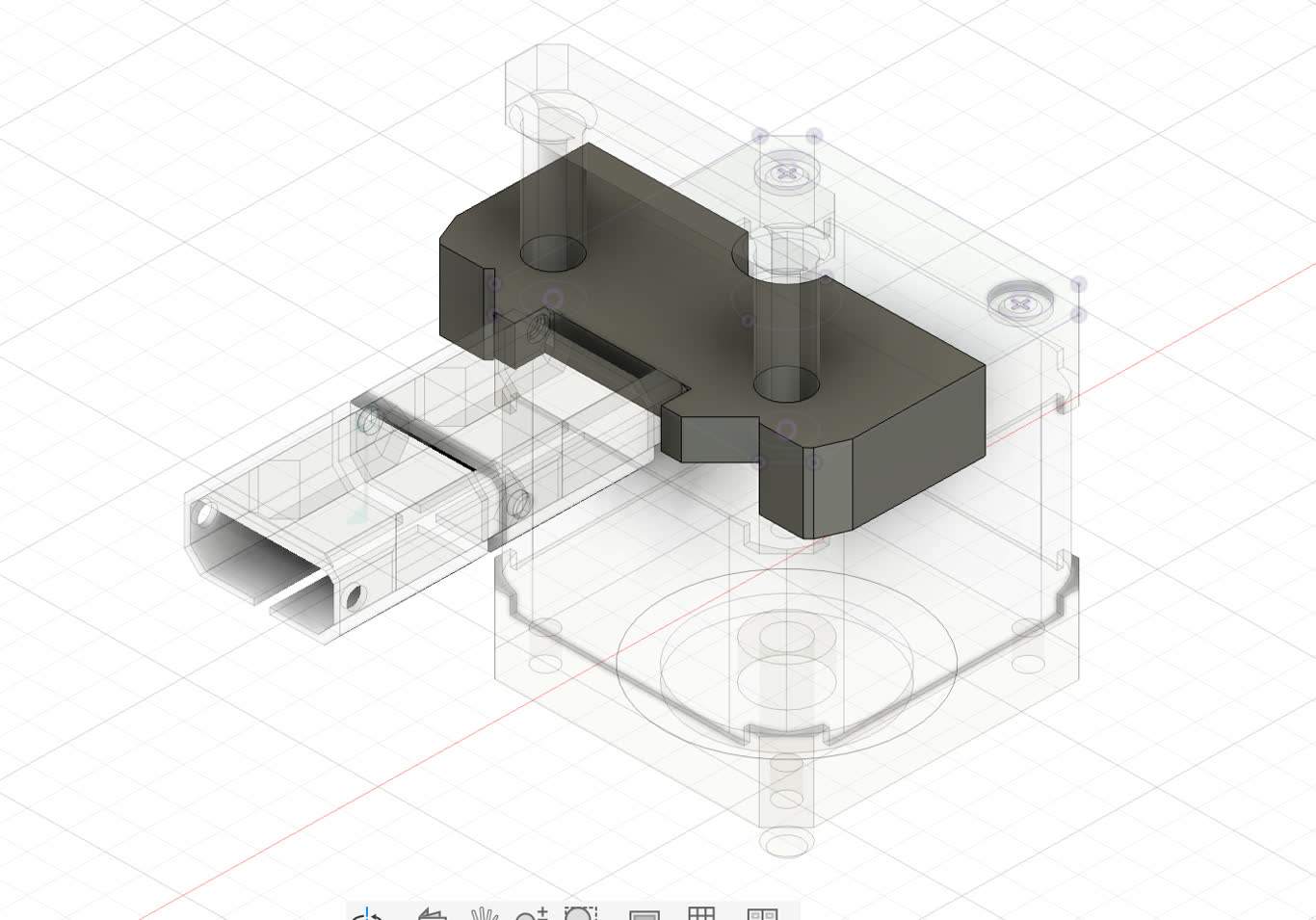
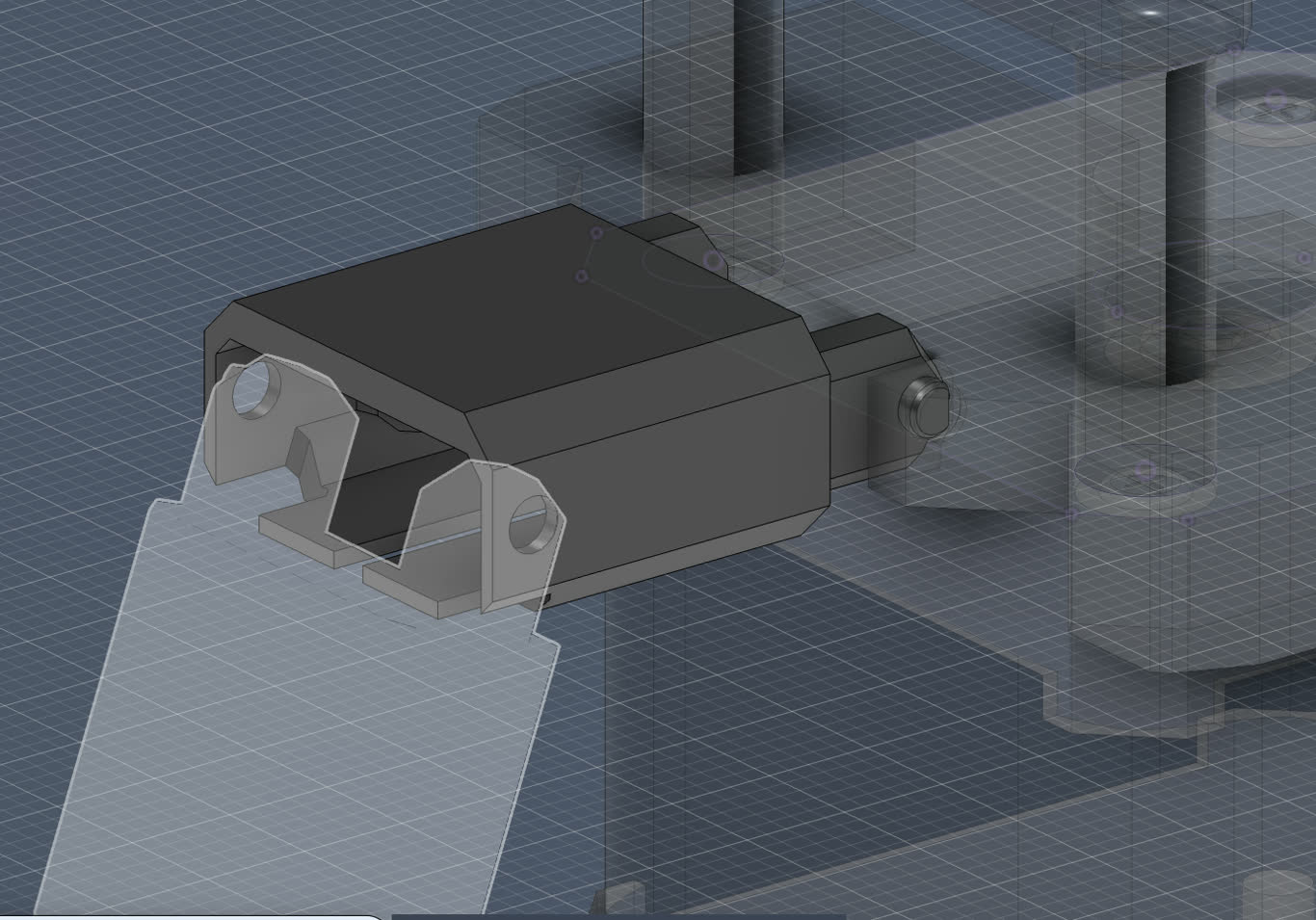
Solution: Design a wireholder connect with motor.
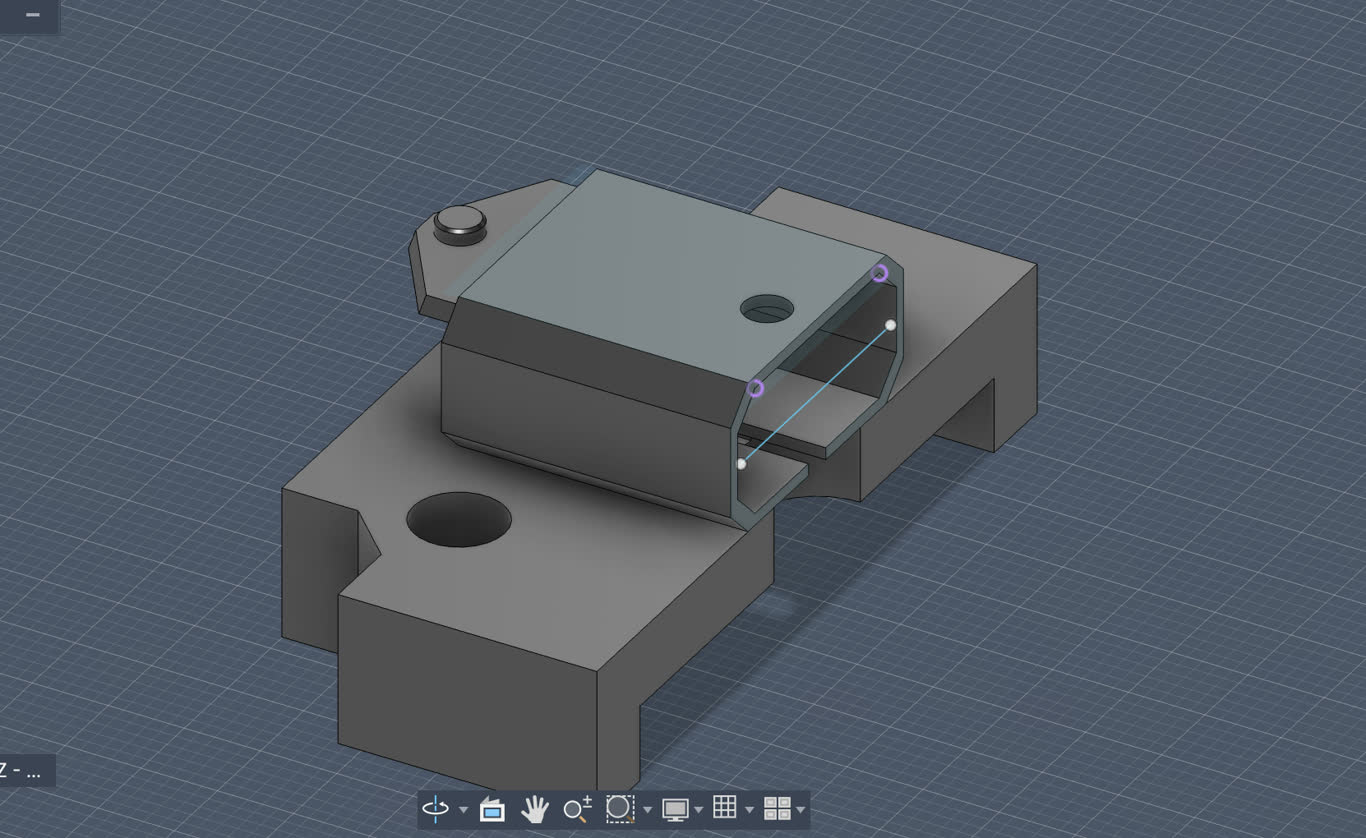 This is version 0 wireholder joint, which has a basic function.But I realice it rotate left and right that can't fit the direction of movement. Then I try another version.
This is version 0 wireholder joint, which has a basic function.But I realice it rotate left and right that can't fit the direction of movement. Then I try another version.
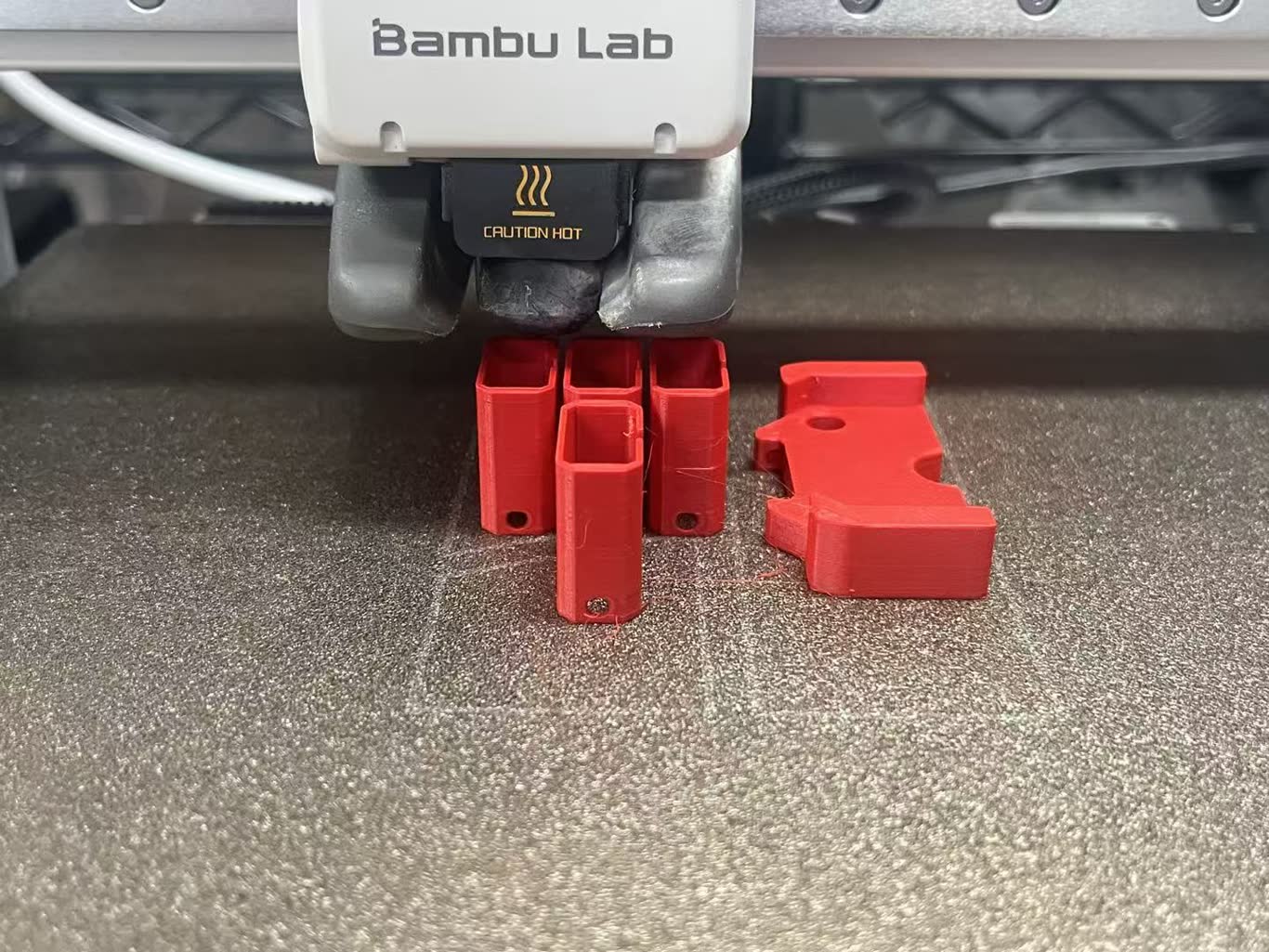
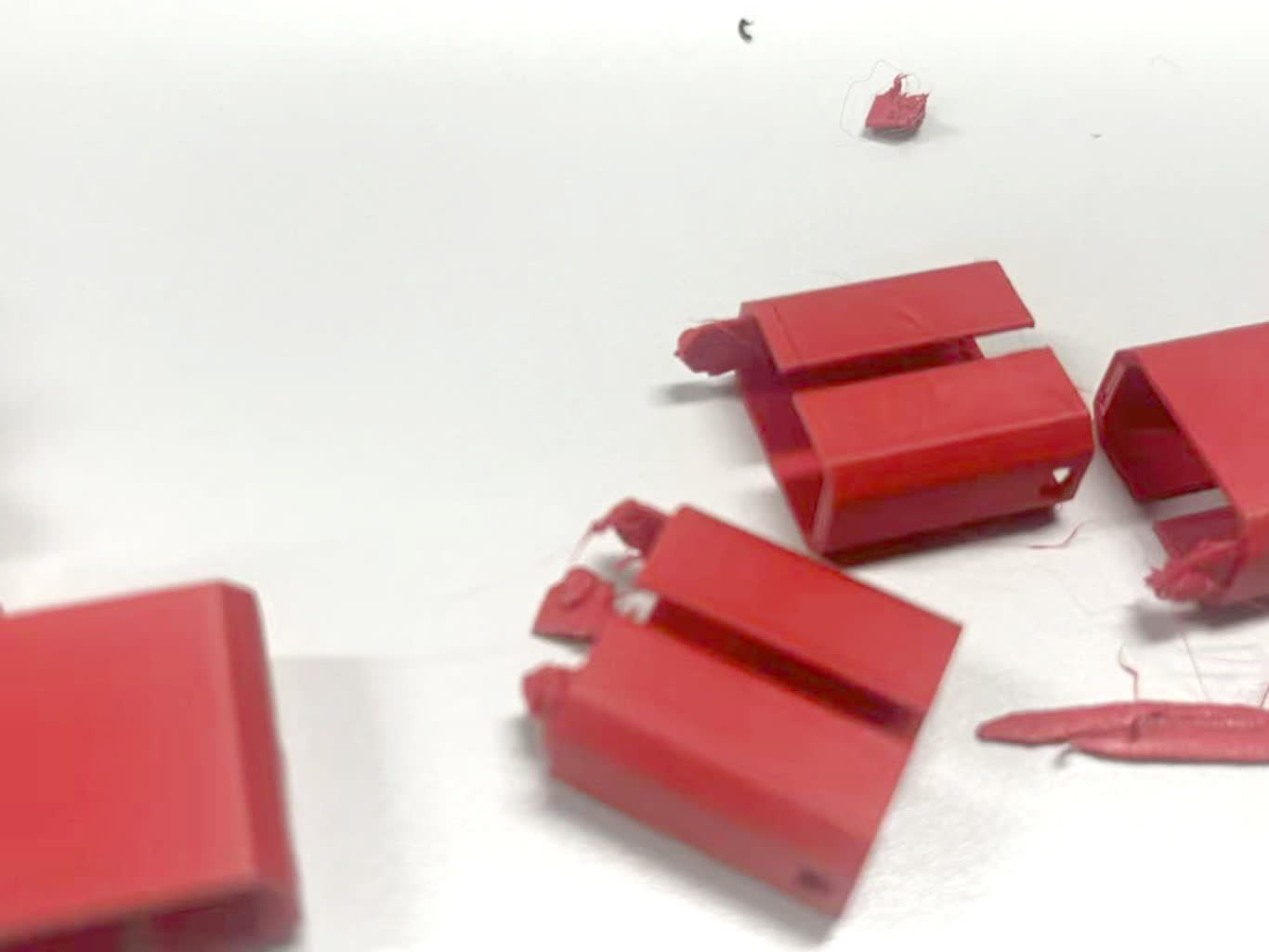
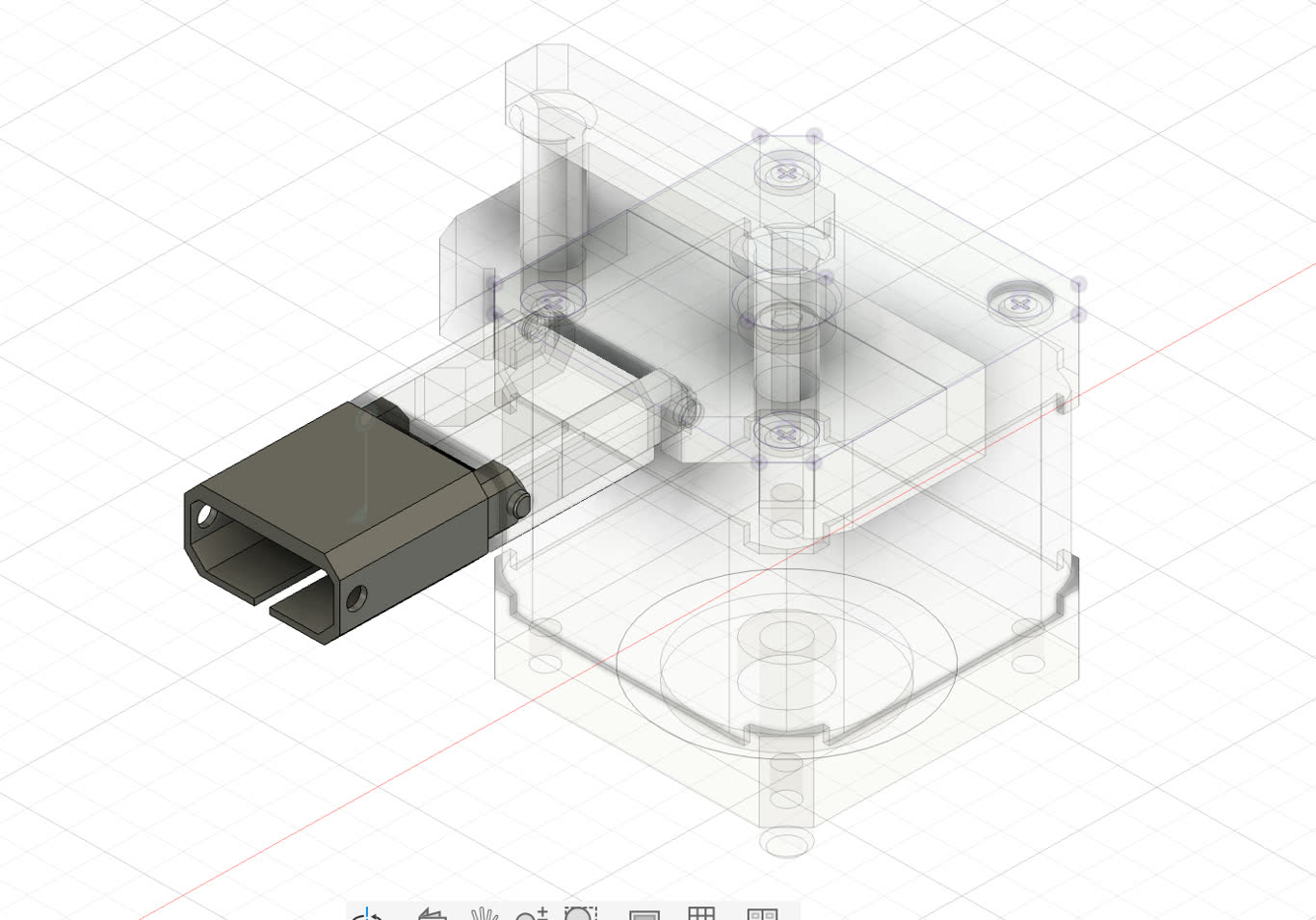
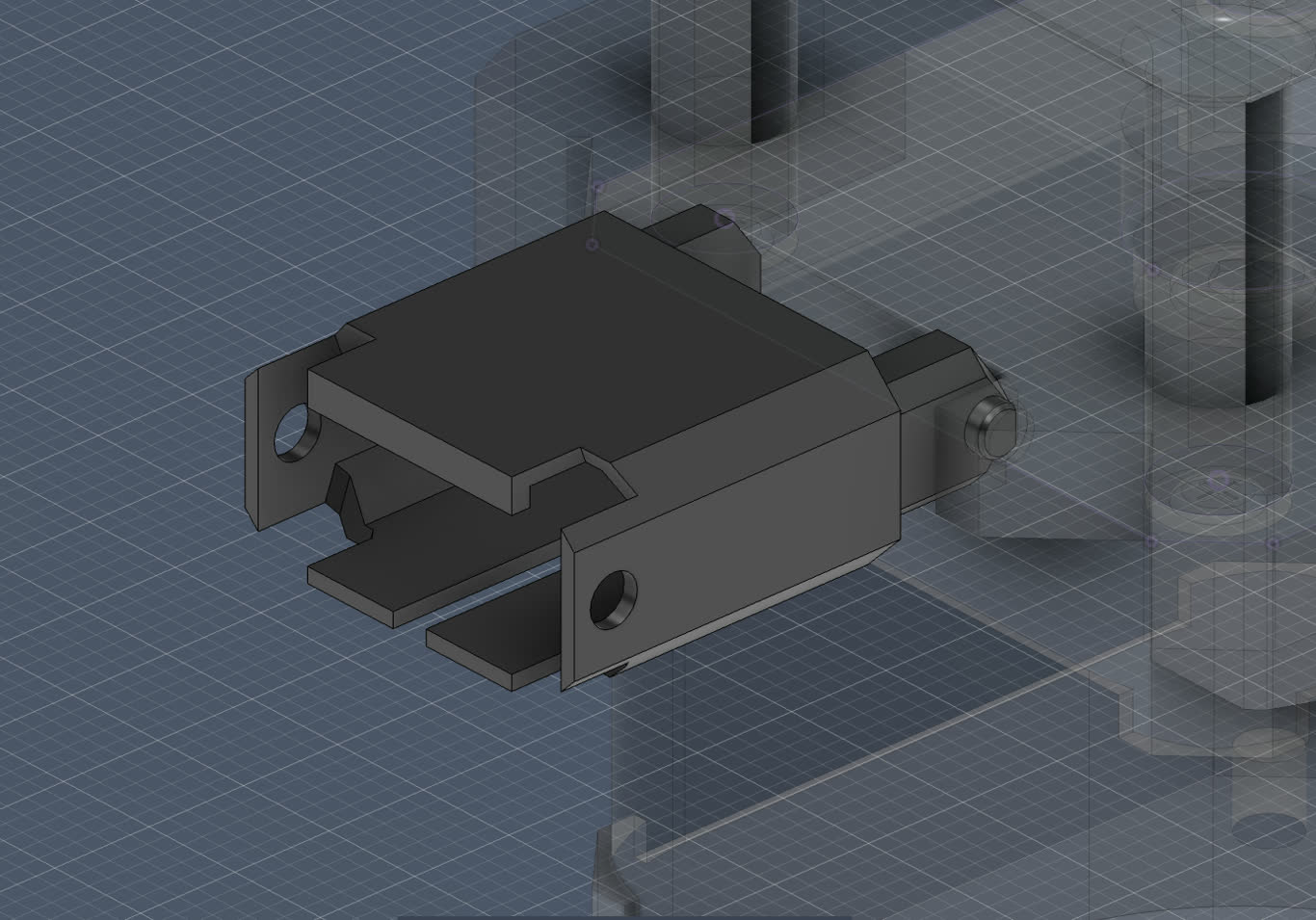
The initial 3D print outcome is too weak. The connection is too thin that easy broke. Then I strengthen the struction
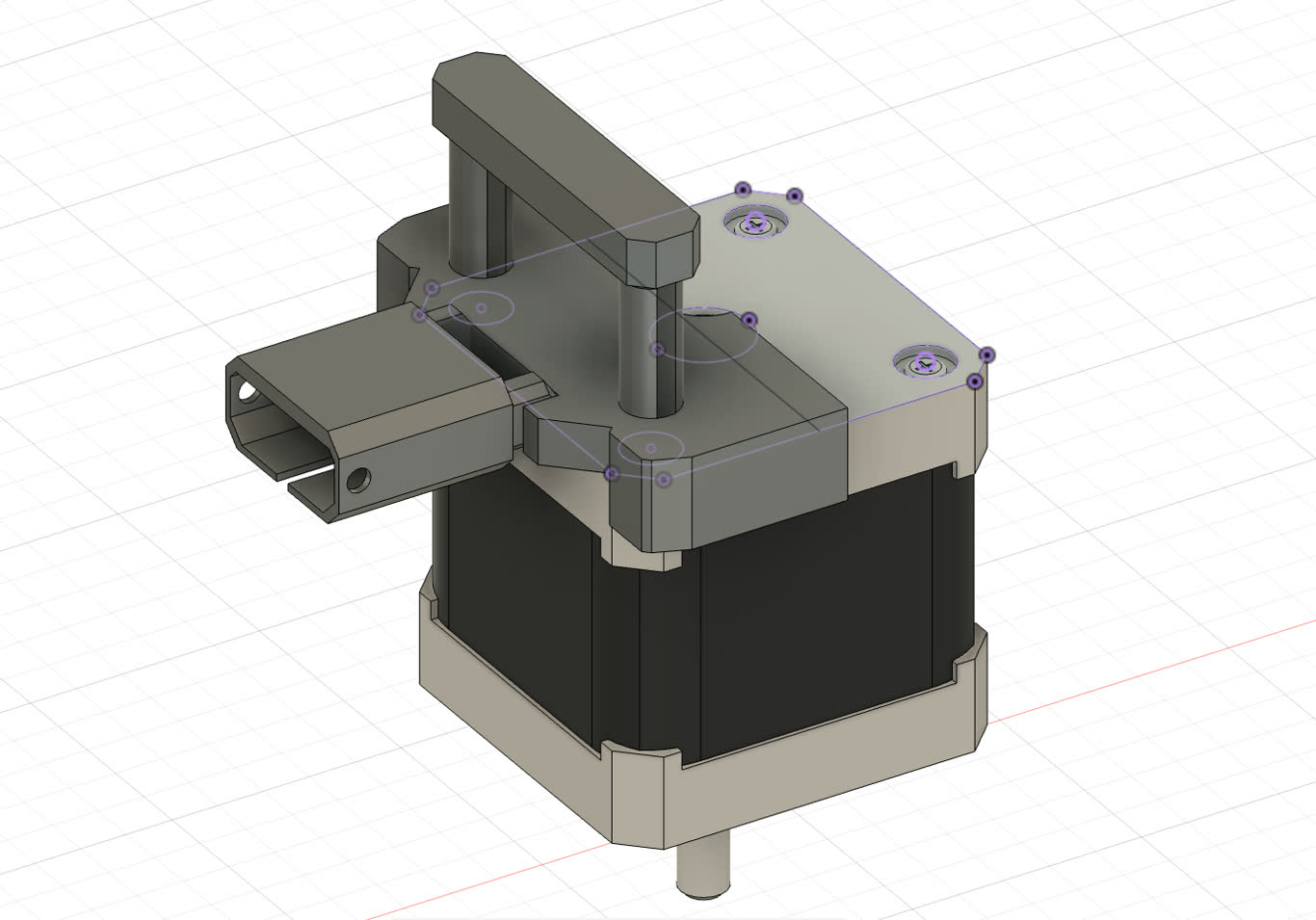
Assamble
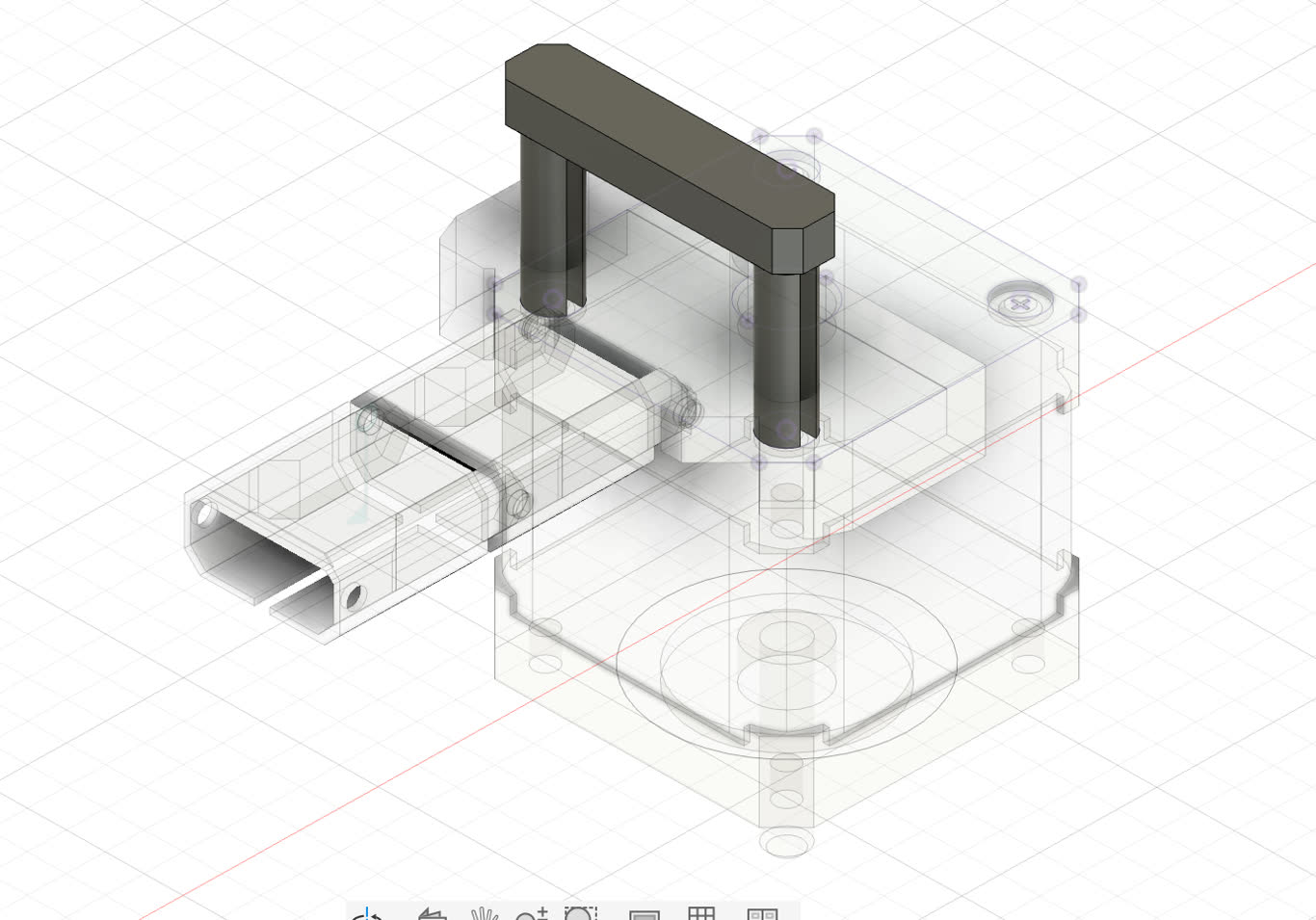

This is version 1 that works. But when we assamble with the machine. One issue is the rotate angle is not enough.
Then I made a version 2 >>>> which has larger angle
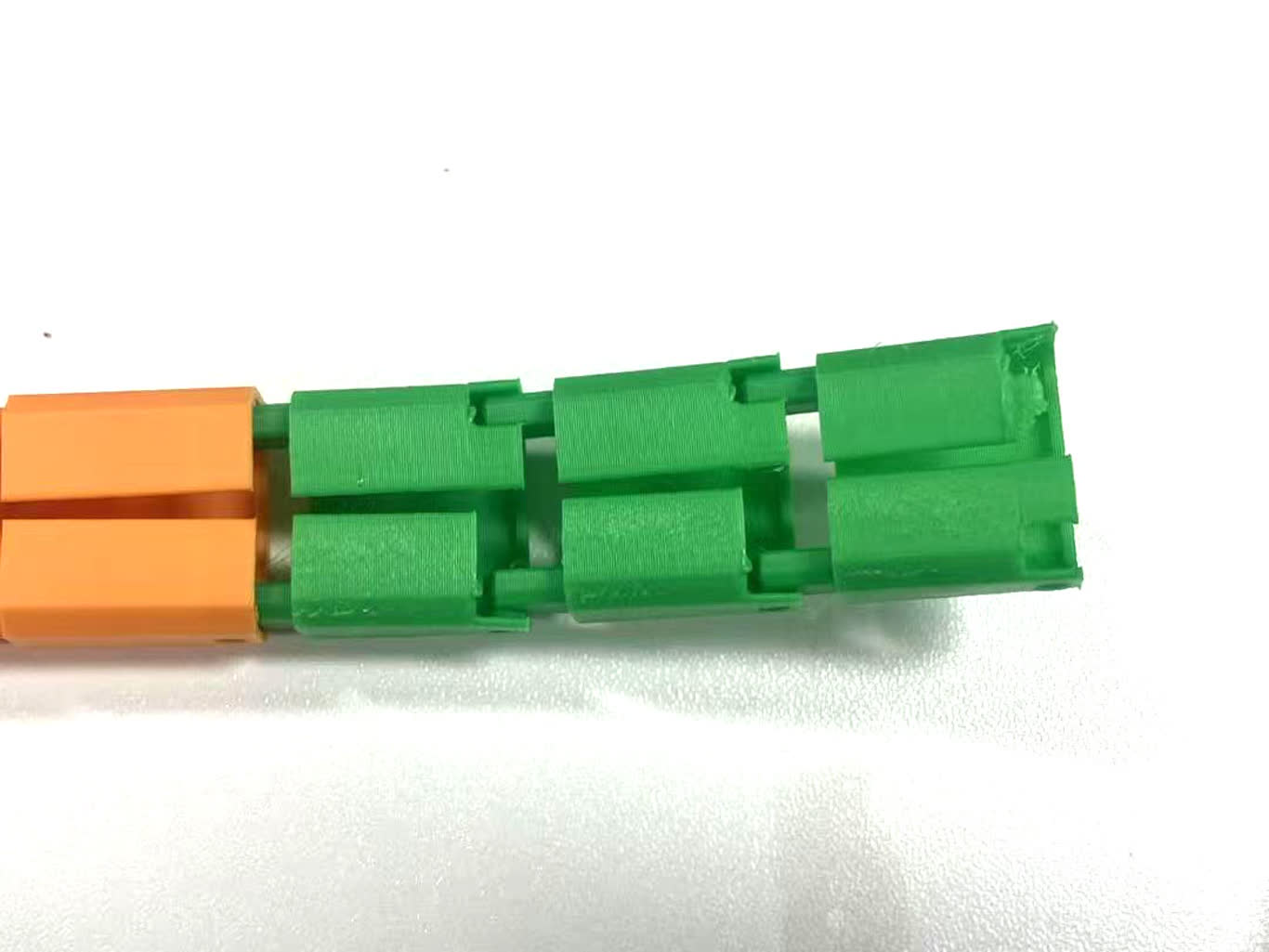
And version 3 >>>> more anlge
3 version all work, the version 1 is the most strong, version 2 is in the middle, version 3 is more fraguile. We can mix them depends on needs.
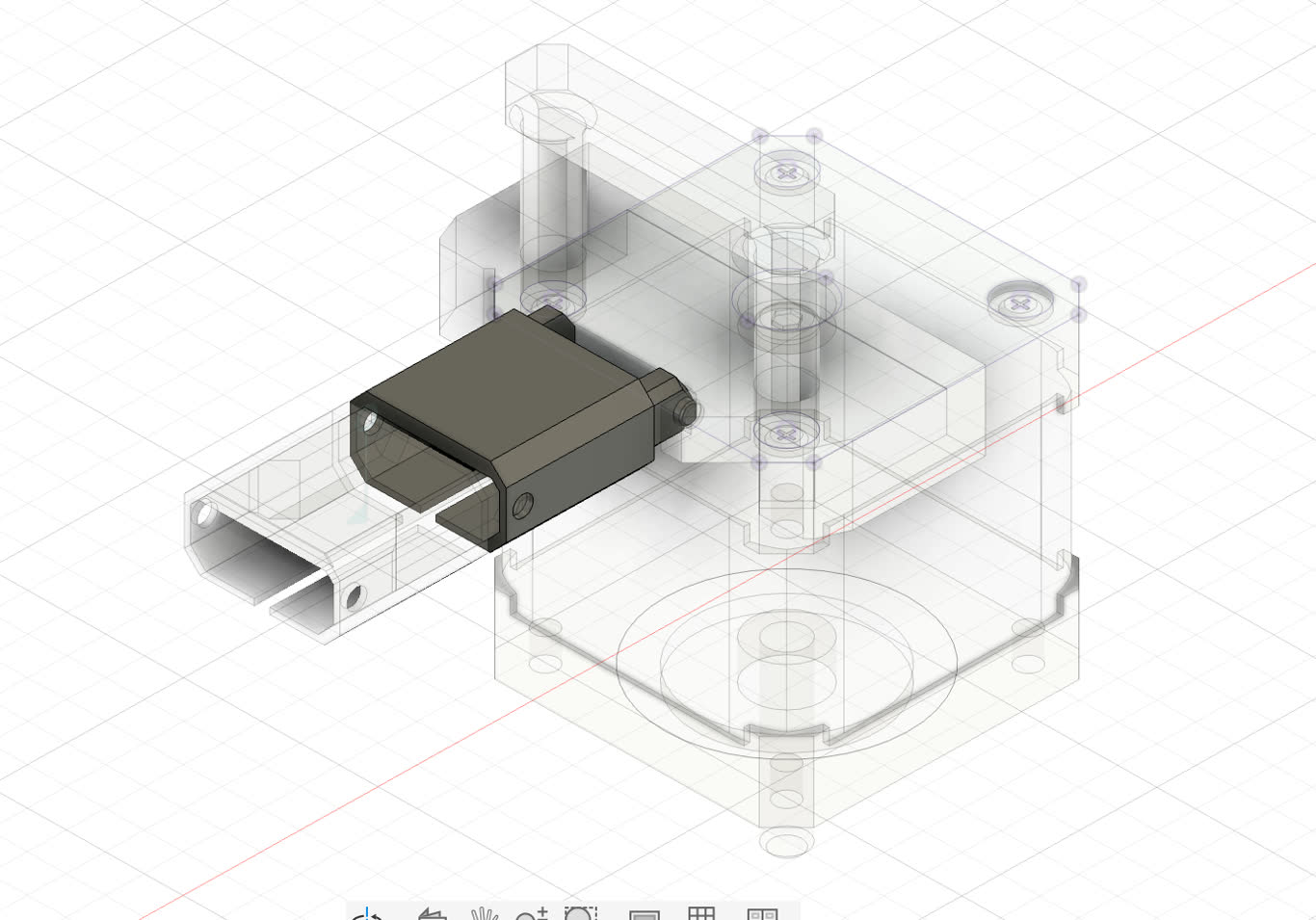
Motorcap
Files
Main body