About me
I share my passion for electronics and programming.
From Ideas to Reality
Recently in Japan, random stabbing incidents have been increasing. Innocent people are suddenly attacked, and it's becoming a serious concern. When I imagine myself in their place, I feel uneasy—because these attacks are hard to predict or prevent. Humans can only see about 200 degrees in front of them, leaving a blind spot behind.
While looking for a solution, I found inspiration in the manga Golgo 13. This manga holds a Guinness World Record with 201 volumes—the most for a single series.
The main character, Golgo 13, is a top-level sniper. He’s extremely skilled, but also very cautious—he never lets anyone stand behind him. That detail gave me an idea.
If I could detect when someone is behind me—like Golgo 13—I might be able to prevent such attacks.
Never stand behind me.
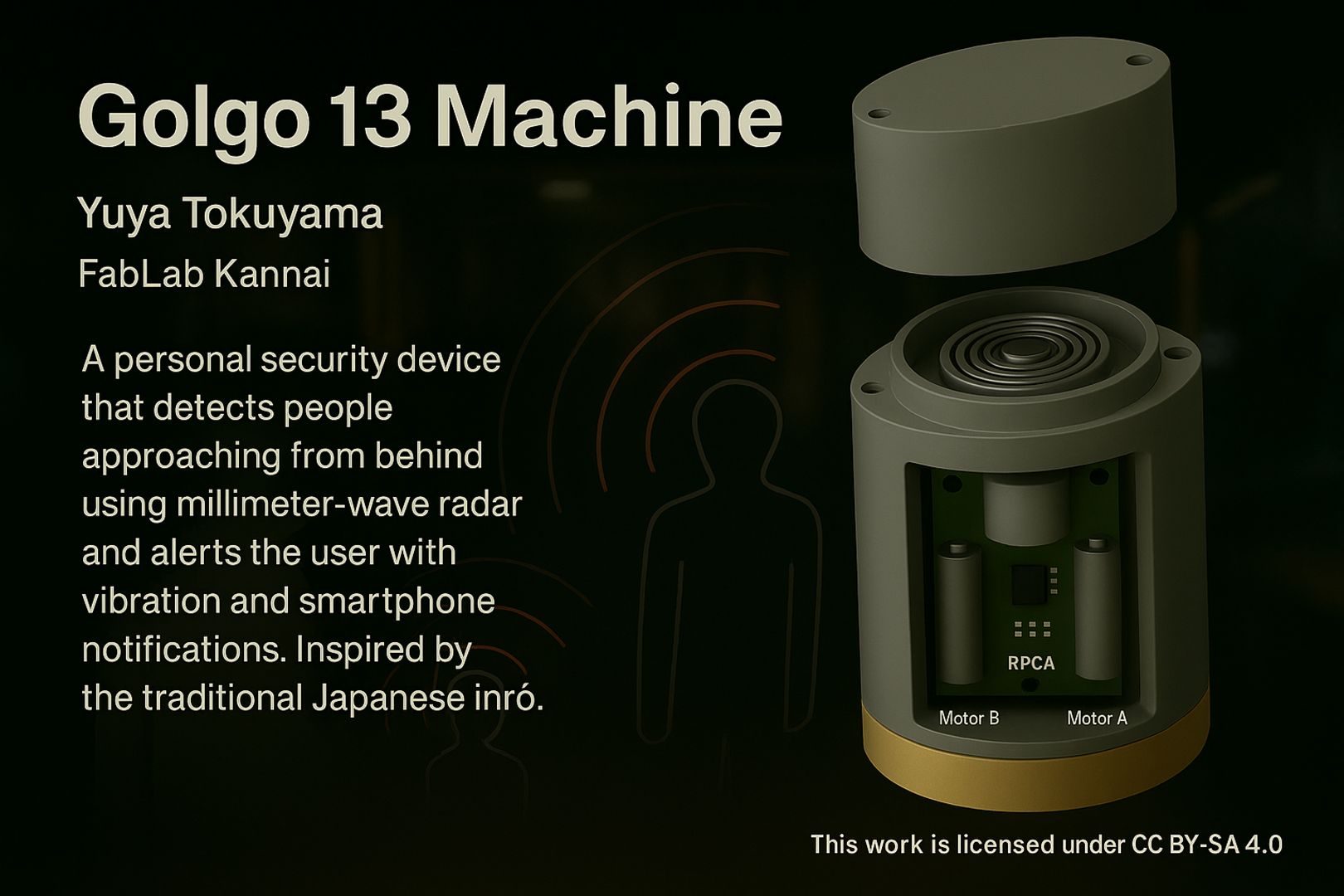
The name of my final project is the Golgo 13 Machine. It is a machine that monitors the area behind it with a millimeter wave radar sensor and alerts you when someone approaches.
Final Project Sketch1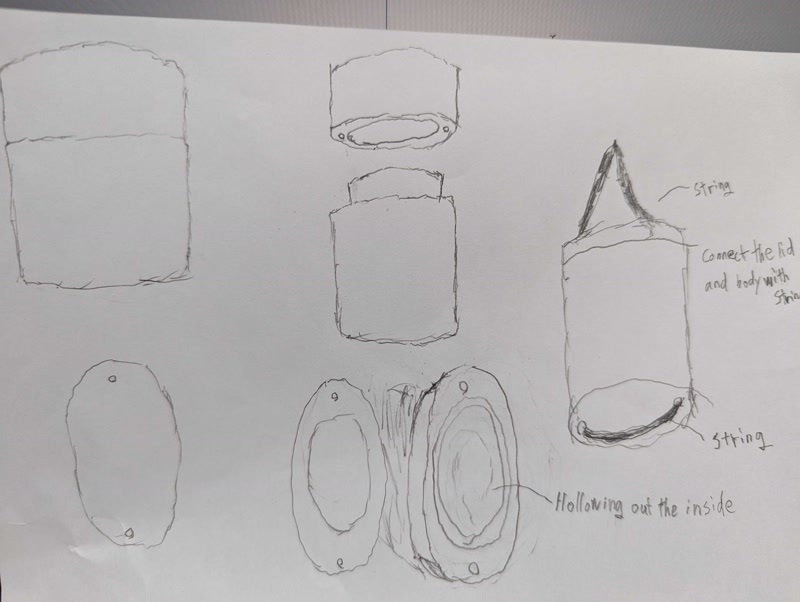
Final Project Sketch2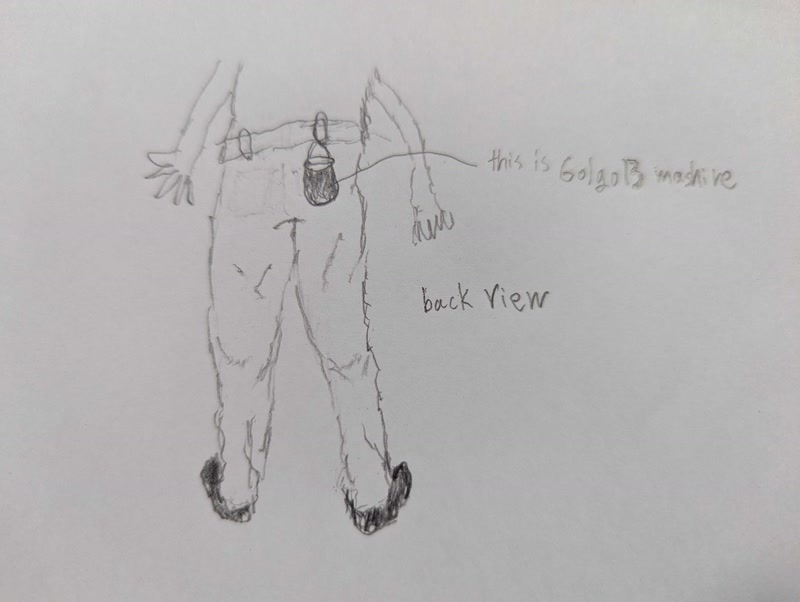
3D model created with Fusion.
Animation of 3D models created in Fusion.
To detect a person approaching from behind using a millimeter-wave radar sensor, and to alert the user via vibration and smartphone notification.
The following image shows an overview of the system.

The following images visually represent the flow of system processing.

| Period | Task Category | Details |
|---|---|---|
| May 10 (Fri) – May 16 (Thu) | ② Hardware Preparation | - Select and test XIAO RP2040, mmWave radar, motor, and BLE module - Create circuit diagrams and test on a breadboard - Complete parts procurement |
| May 17 (Fri) – May 23 (Thu) | ③ Software Development | - Acquire and analyze sensor data - Develop vibration motor control logic - Implement BLE communication for smartphone notifications |
| May 24 (Fri) – May 29 (Wed) | ④ Case Design & Fabrication | - Design enclosure using 3D CAD (e.g., Fusion 360) - Fabricate using 3D printer or CNC router - Plan and test internal component layout |
| May 30 (Thu) – June 2 (Sun) | ⑤ System Integration & Testing | - Integrate hardware and software - Perform functional testing and debugging - Evaluate in real-world scenarios |
| June 3 (Mon) – June 5 (Wed) | ⑥ Documentation & Submission Prep | - Capture and edit project photos/videos - Prepare final presentation slides and 1-minute demo video - Update website and organize submission materials |
| June 6 (Thu) | Submission Day | - Final review and upload |
System integration was carried out in Week 15.
For details, please refer to the Week 15 page.
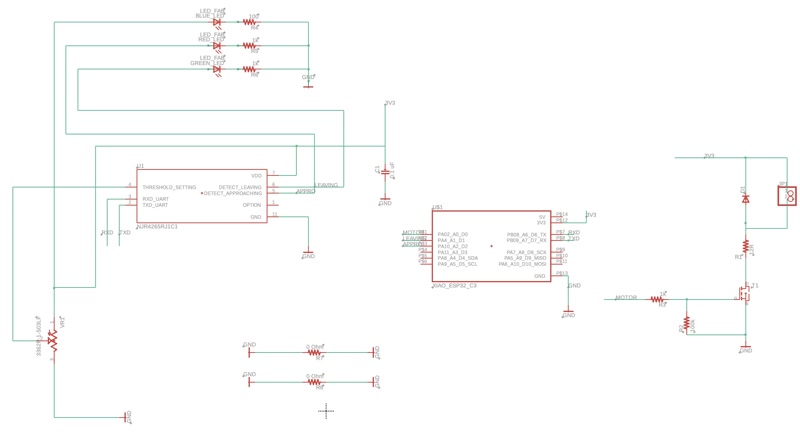
To enable system integration, I designed a custom PCB using Fusion 360 tailored to the final project.
The board includes headers for connecting sensors, power input, and communication pins.
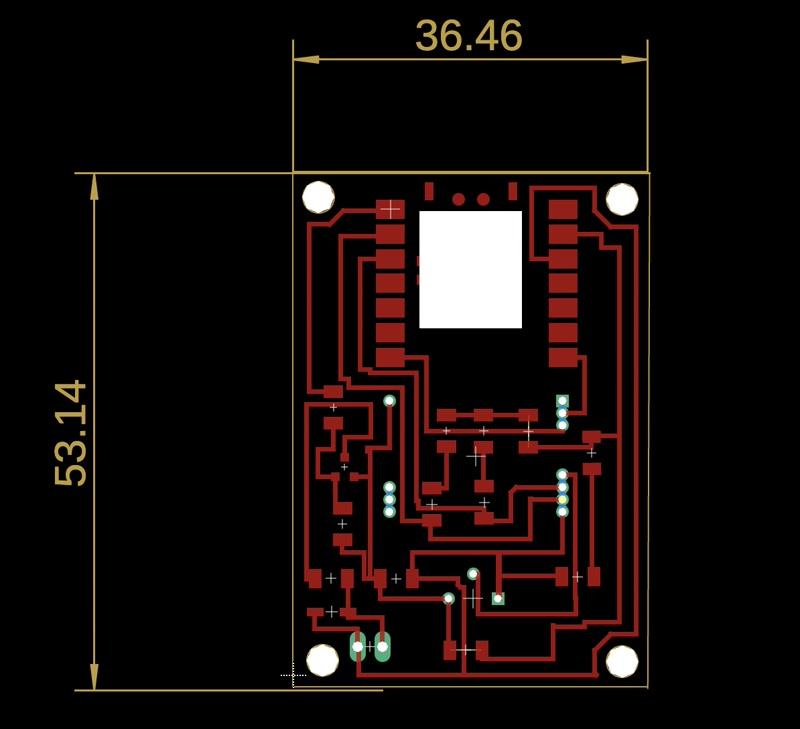
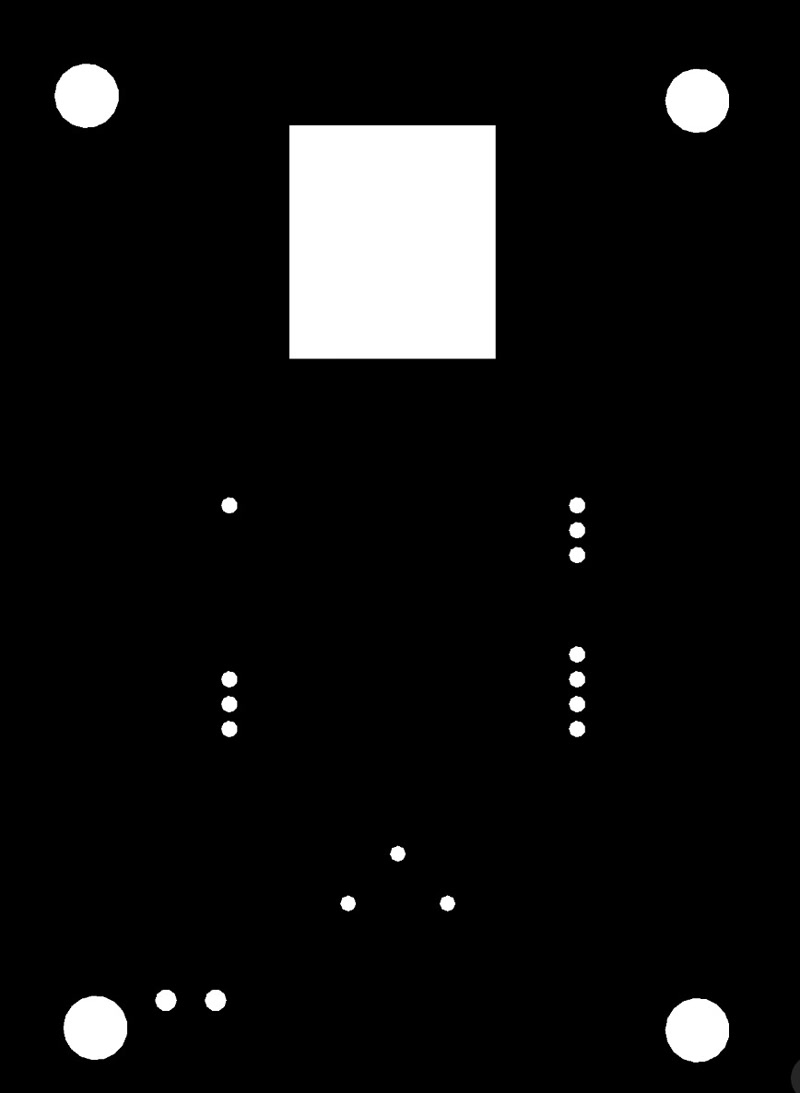
traces.png: for milling copper tracesmillholes.png: for drilling component holesoutline.png: for cutting the board outline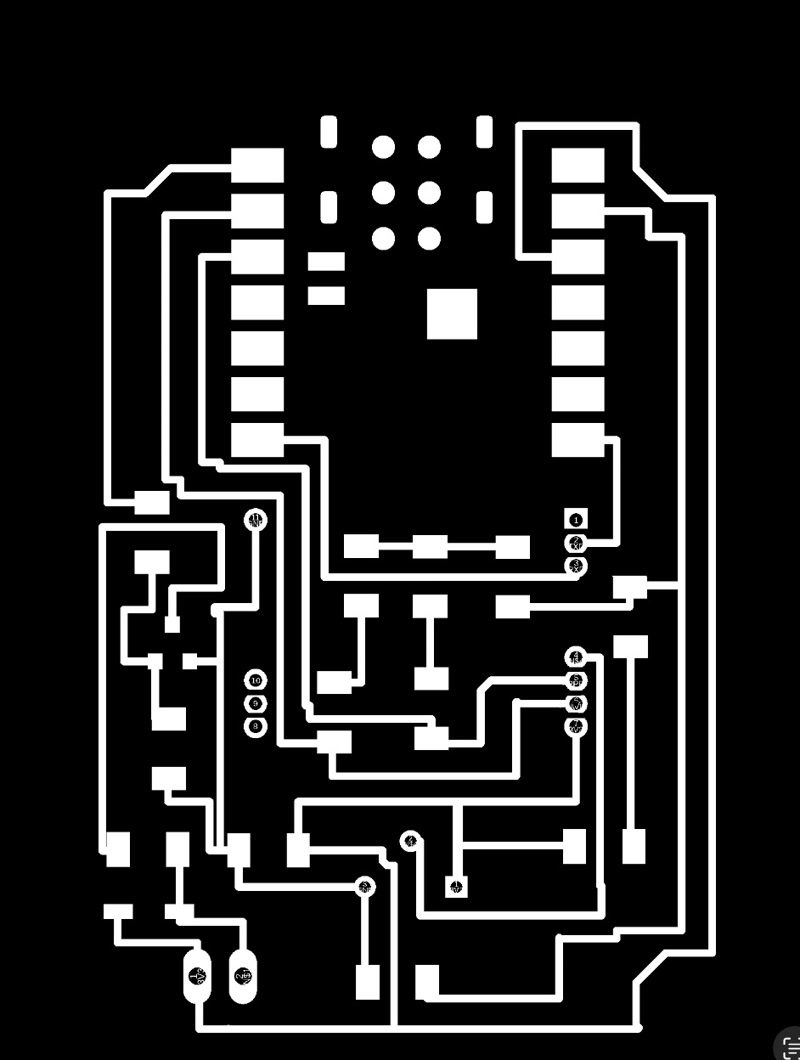
TIP
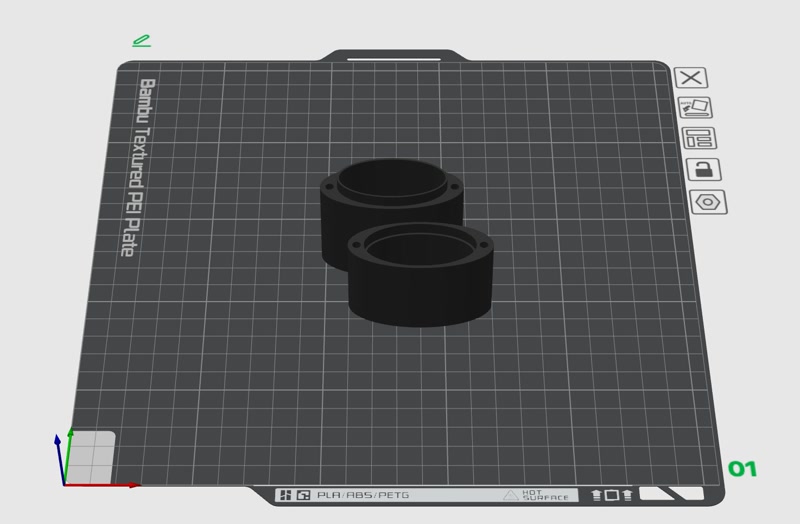
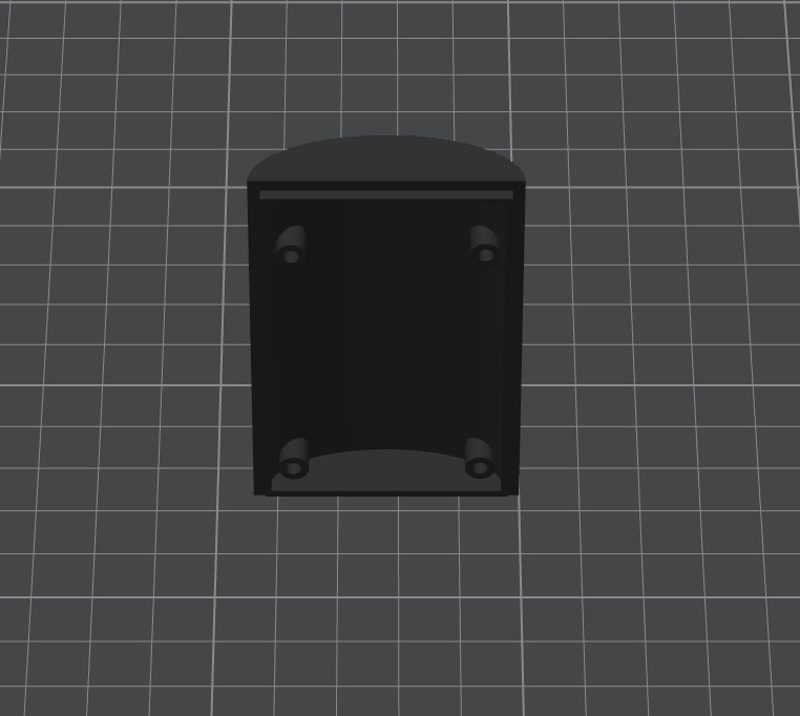
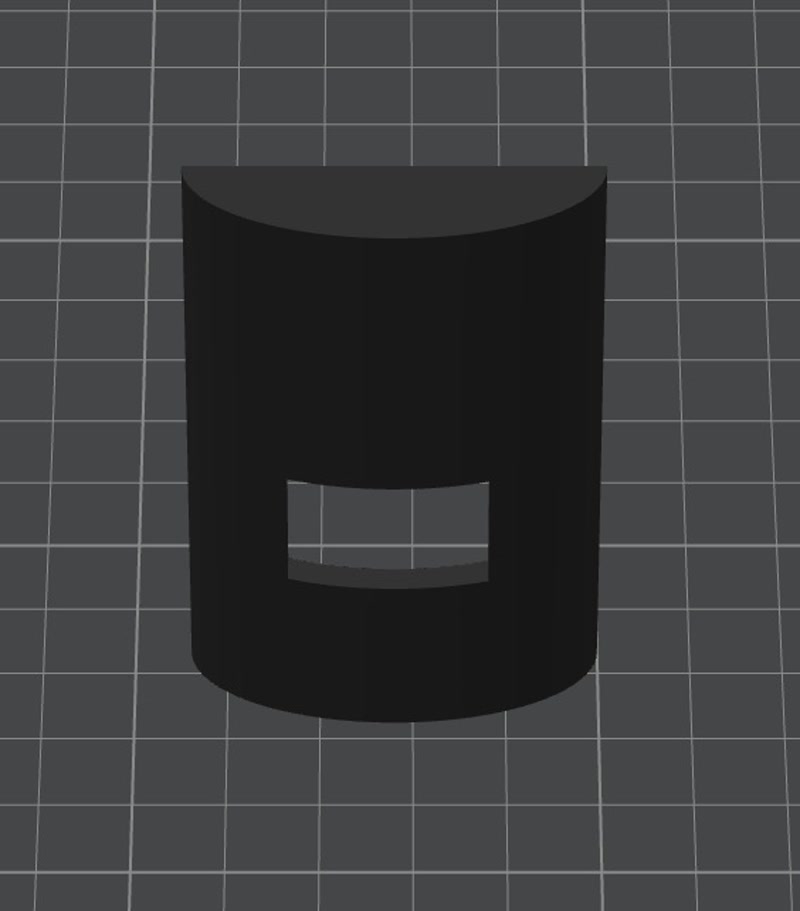
I modified the 3D model created in week02 to accommodate the PCB.
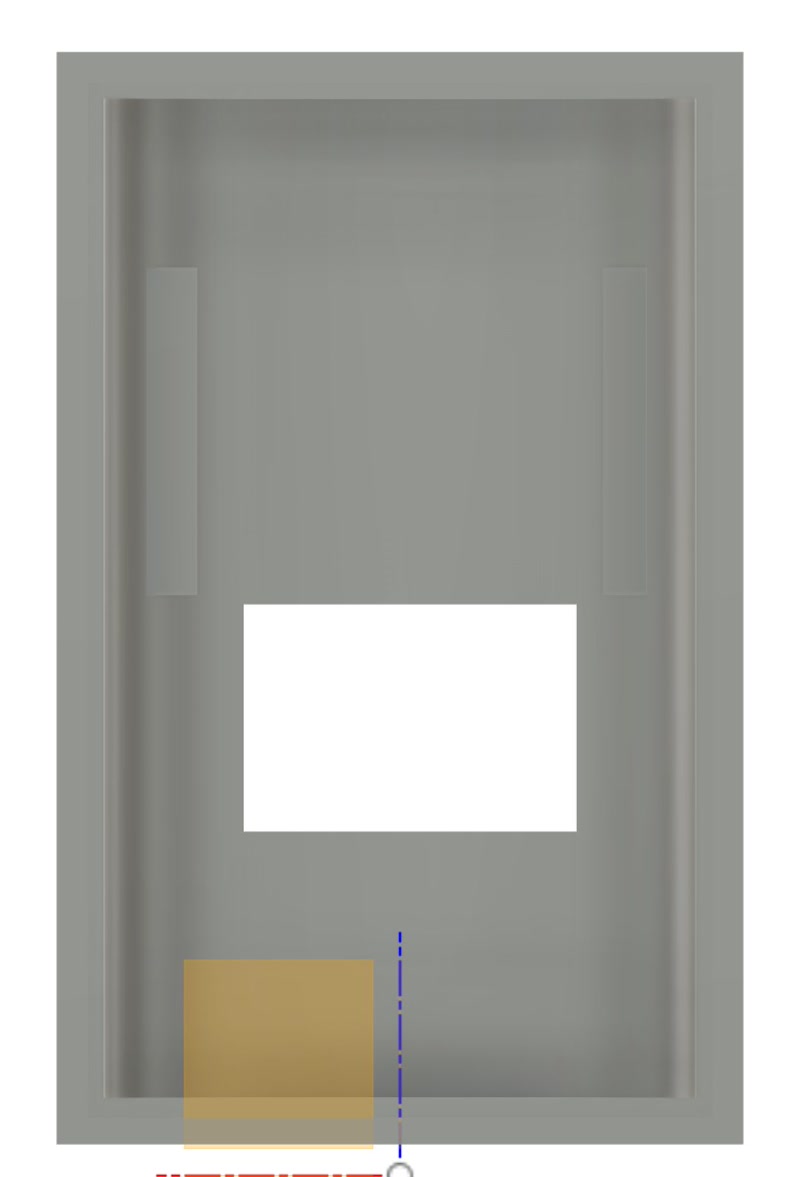
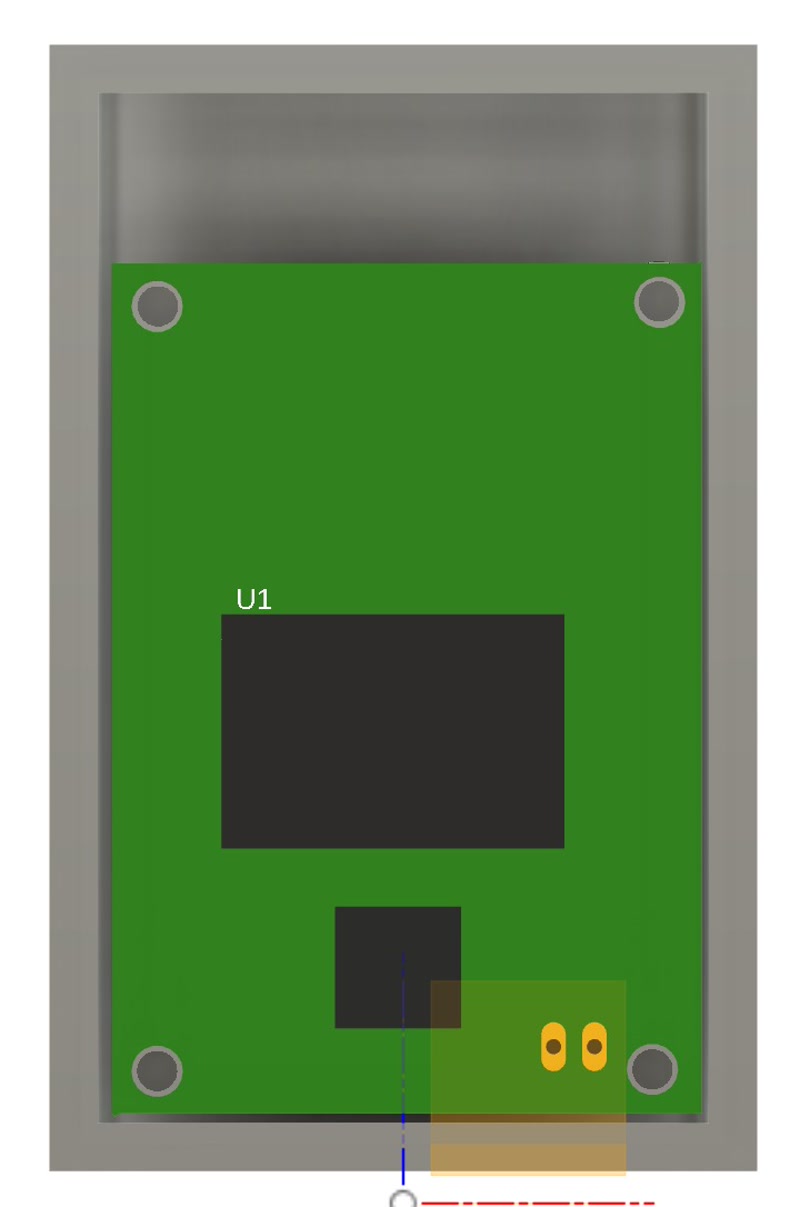

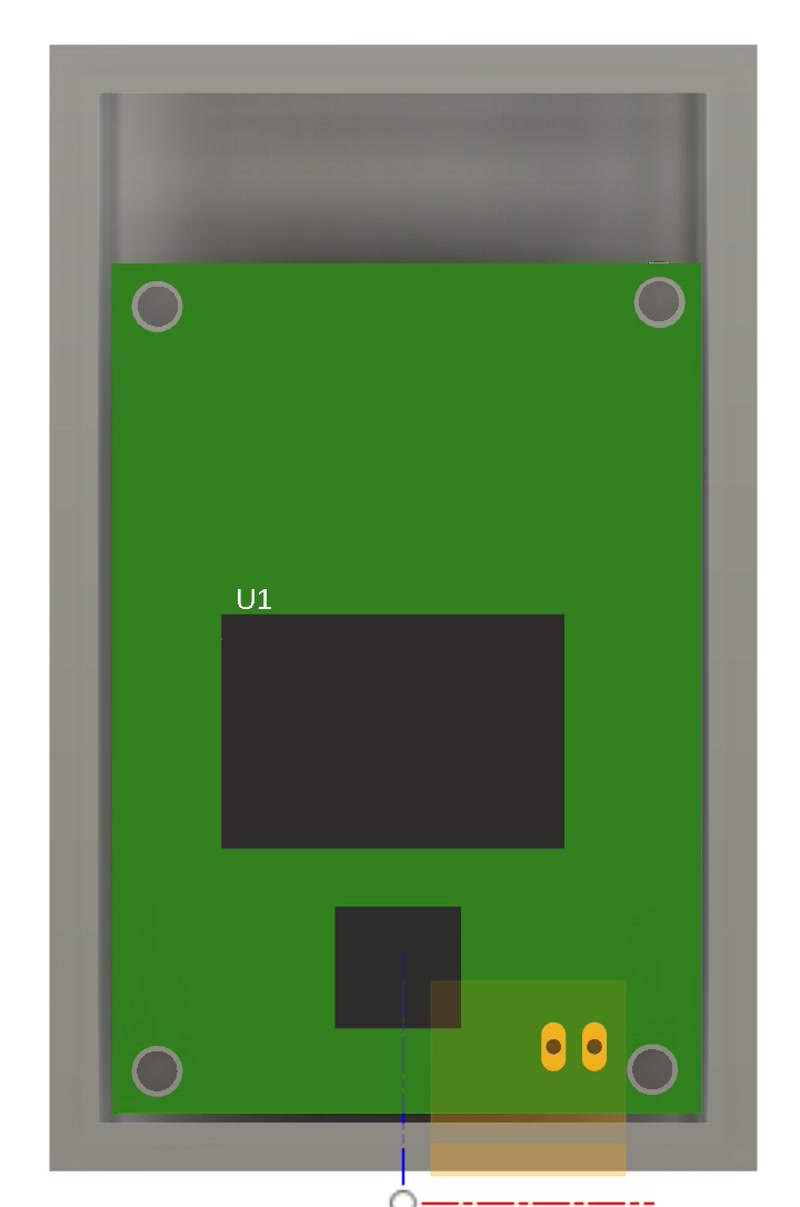
3D Assembly Animation in Fusion 360
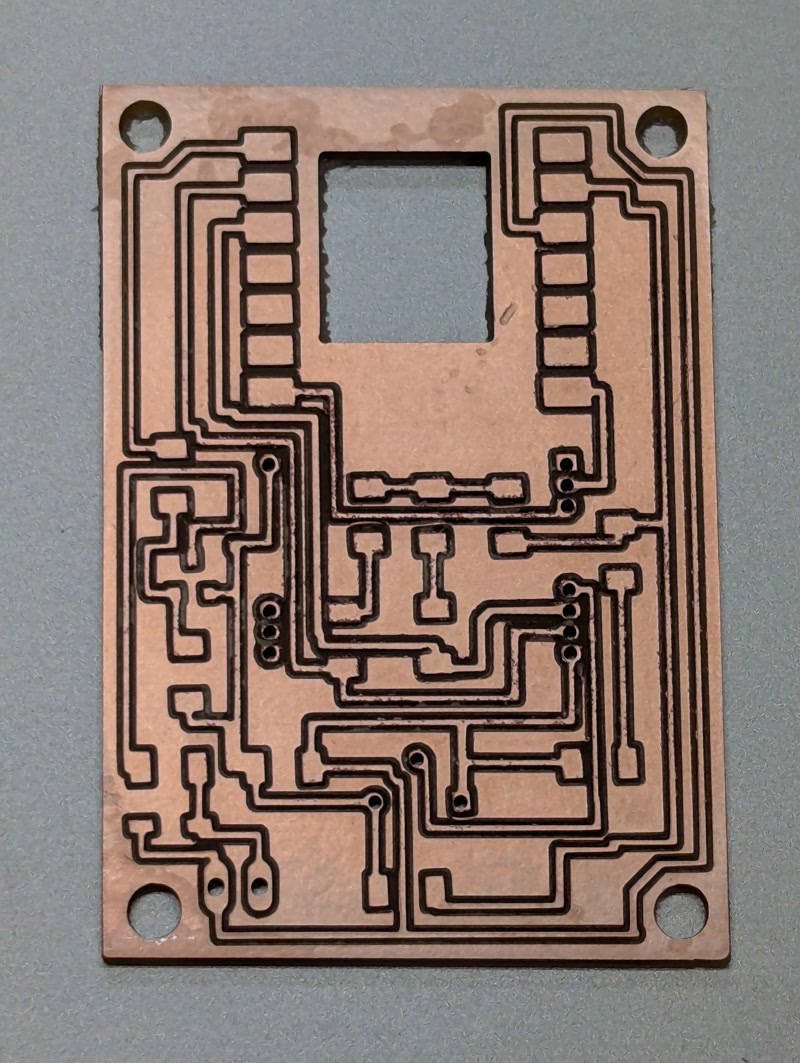
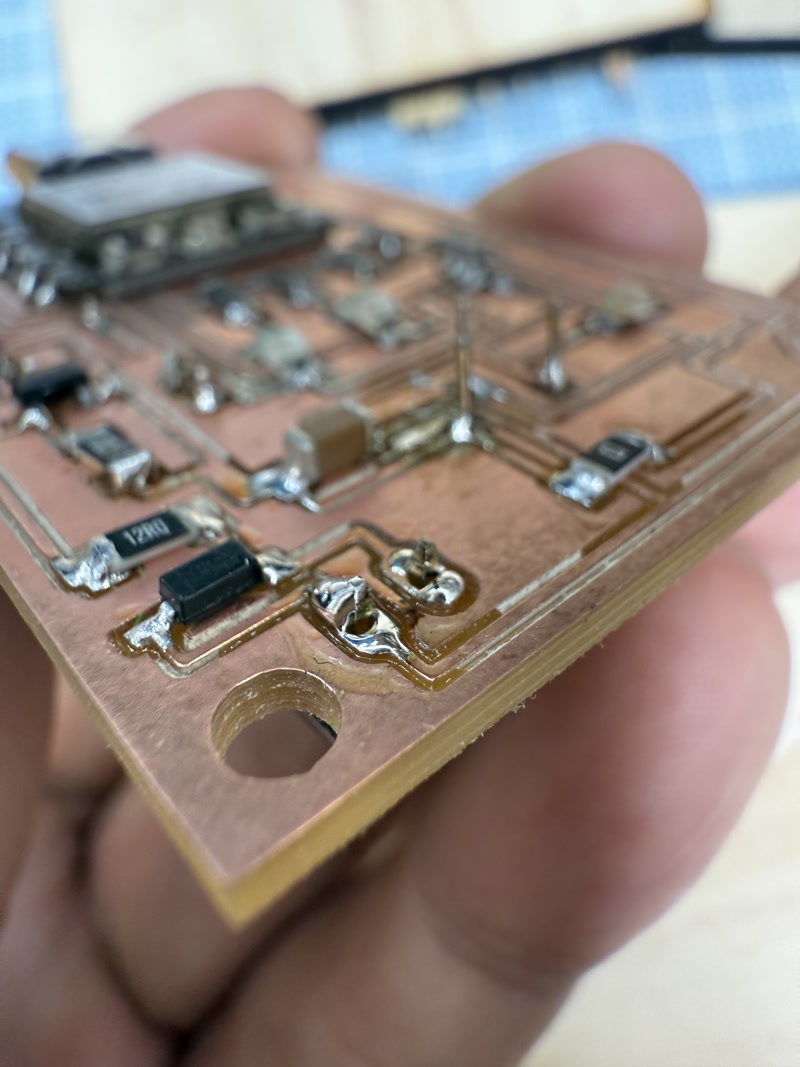
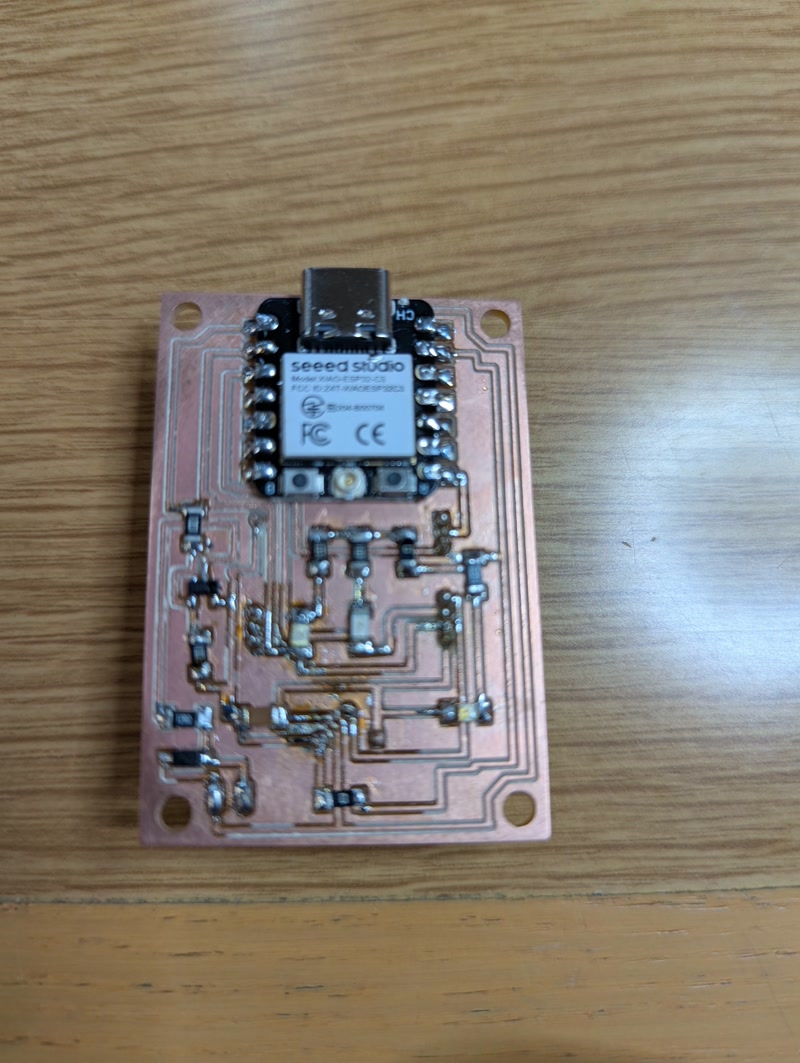
Based on the PCB data designed in Fusion 360, I physically fabricated the board using a CNC milling machine.
traces.pngmillholes.pngoutline.png
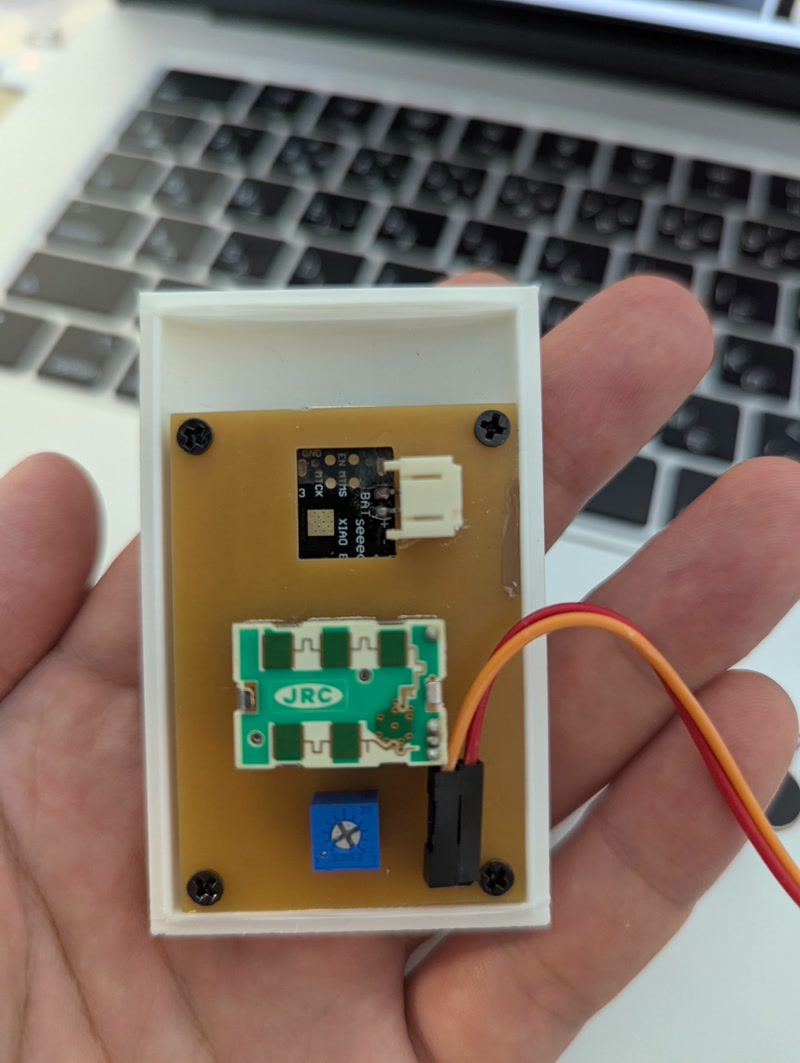
Mounted components:
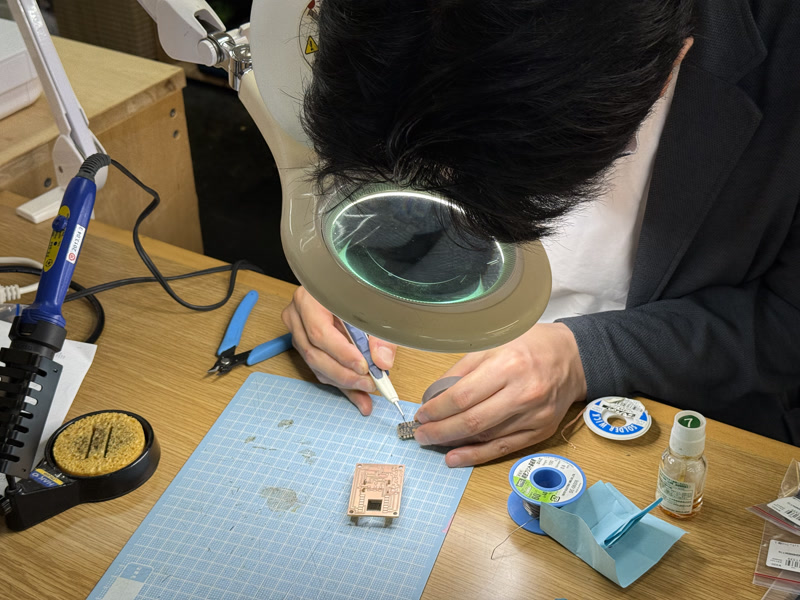
Soldering method:
Through-hole components were soldered manually
SMD components were soldered using tweezers and a temperature-controlled soldering iron
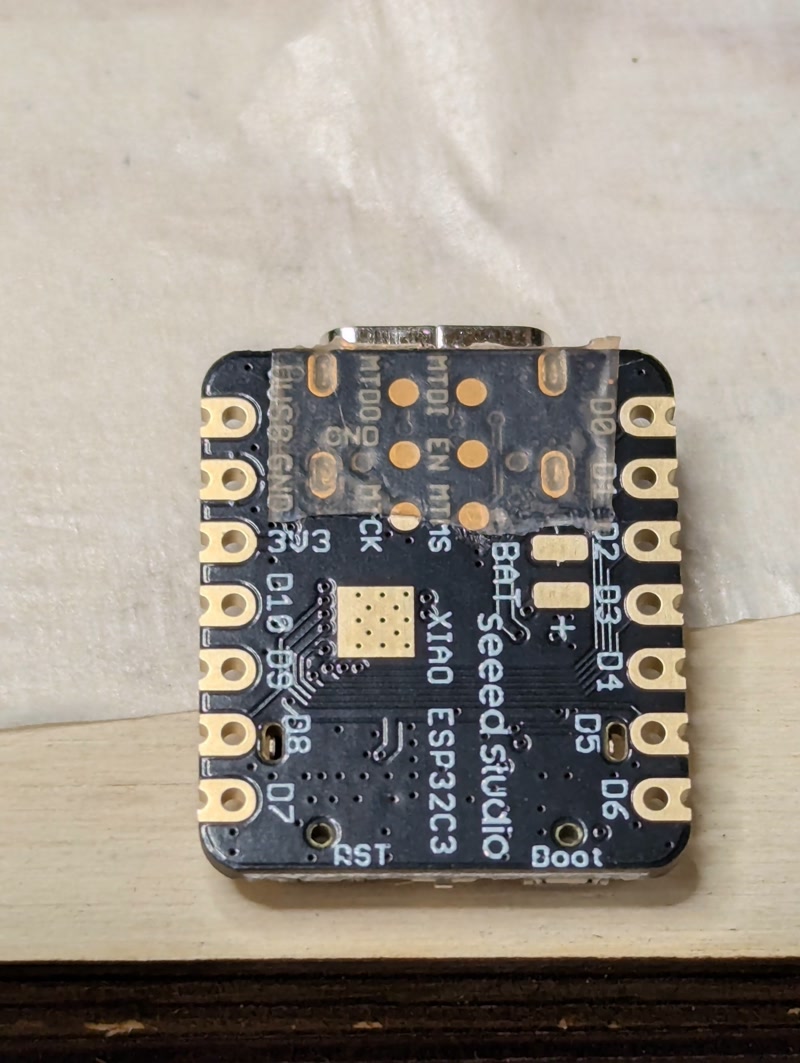
Insulation tape was applied to the bottom of the XIAO ESP32-C3 module before mounting to prevent the underside pads from contacting other conductive surfaces
Inspection:

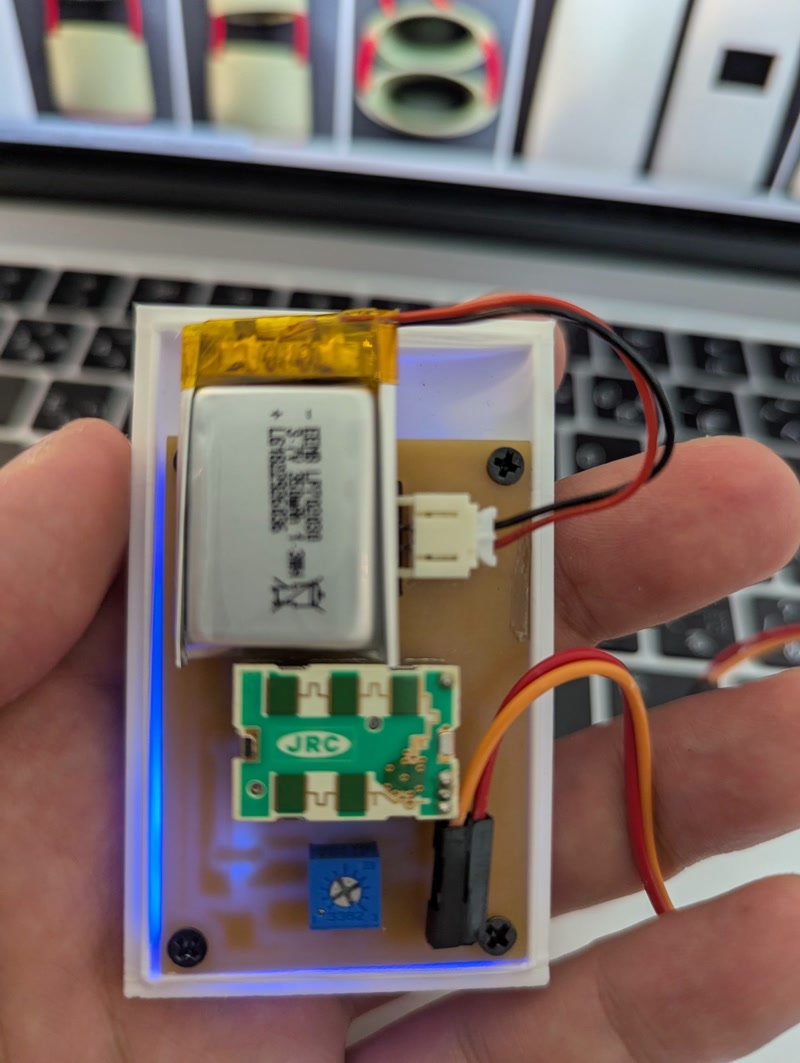
After completing the PCB, I printed the designed enclosure and internal frame using a 3D printer, and integrated the PCB.

To add character to the enclosure's appearance, I used the Silhouette Curio 2 to create and apply a sticker of Golgo 13's iconic eyebrows.
Design preparation: Prepare an image of Golgo 13’s eyebrows
Editing in Silhouette Studio:
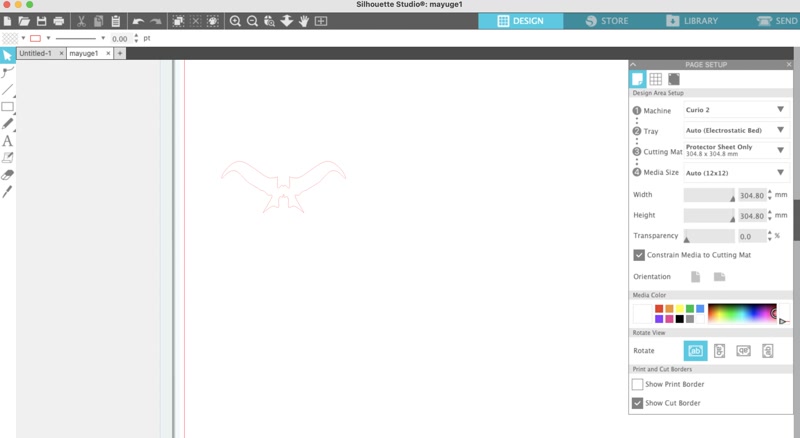
Cutting Setup:
Cutting Execution: Accurately cut the eyebrows from the vinyl and weed out unnecessary areas
Transfer and Application:


3D file Download
PCB file Download
Sticker file Download
This integration step was crucial in transforming the electronics and mechanical design into a cohesive, functional system.
I was able to validate dimensions, refine the layout, and ensure that the design both looked and functioned like a finished product.
| Type | Item | Quantity | Note | Source | Cost |
|---|---|---|---|---|---|
| MCU | U$1 (XIAO ESP32C3) | 1 | Development board (Seeed Studio) | AKIZUKI DENSHI | ¥1,080 |
| Sensor | U1 (NJR4265RJ1C1) | 1 | Doppler sensor module (10m CW mode) | AKIZUKI DENSHI | ¥2,300 |
| Motor | Motor | 1 | Mini vibration motor 2.0mm | AKIZUKI DENSHI | ¥180 |
| Trimmer | VR1 (3362P-1-503LF) | 1 | 50kΩ Single-turn Trimmer (Bourns) | AKIZUKI DENSHI | ¥50 |
| LED | Blue LED | 1 | Blue LED (1206 size) | AKIZUKI DENSHI | ¥10 |
| LED | GREEN_LED | 1 | Green LED (1206 size) | AKIZUKI DENSHI | ¥13 |
| LED | RED_LED | 1 | Red LED (1206 size) | AKIZUKI DENSHI | ¥10 |
| Capacitor | C1 (1uF) | 1 | Ceramic capacitor 1206 | AKIZUKI DENSHI | ¥70 |
| Diode | D1 | 1 | General-purpose diode (SOD-123 package) | AKIZUKI DENSHI | ¥8 |
| Header | JP1 | 1 | 2-pin pin header (2.54mm pitch) | AKIZUKI DENSHI | ¥35 |
| Resistor | R1 (12Ω) | 1 | Chip resistor 1206 | RS | ¥15 |
| Resistor | R2 (100kΩ) | 1 | Chip resistor 1206 | RS | ¥49 |
| Resistor | R3,R5,R6 (1kΩ) | 3 | Chip resistor 1206 | RS | ¥16 |
| Resistor | R4 (100Ω) | 1 | Chip resistor 1206 | RS | ¥99 |
| Resistor | R7,R8 (0Ω) | 2 | Jumper resistor | RS | ¥5 |
| Transistor | T1 | 1 | SOT-23 MOSFET | AKIZUKI DENSHI | ¥33 |
| Total | ¥3,973 |
You can see that the red LED lights up only when the sensor detects someone approaching, and the green LED lights up when the person moves away. The Doppler sensor testing is working as expected, so there are no issues!
Although I encountered several issues, I was finally able to make the mini vibration motor vibrate upon approach detection.
Initially, I connected the motor output to GPIO2 (D0) on the XIAO ESP32-C3, but it didn’t work as expected when trying to control it through the program.
The root cause turned out to be the use of GPIO2 (D0), which is one of the boot strapping pins on the XIAO ESP32-C3.
Boot strapping pins are critical because the XIAO ESP32-C3 reads the logic levels of specific GPIOs at reset to determine the boot mode.
If GPIO2 is LOW at boot, the device may enter UART download mode instead of executing the user program.
Even if the pin is HIGH at boot and normal startup occurs, GPIO2 is still in an input (HIGH) state when setup() begins, so it cannot be used as an output pin to drive a MOSFET. As a result, the motor cannot be turned on.
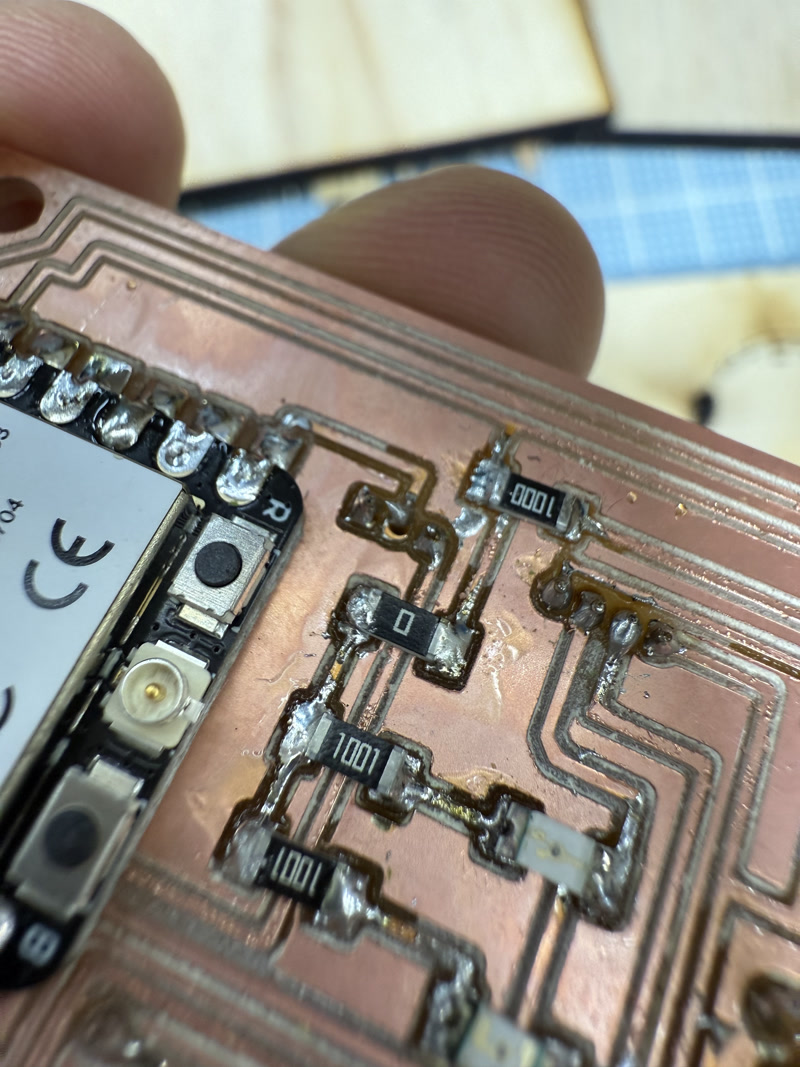
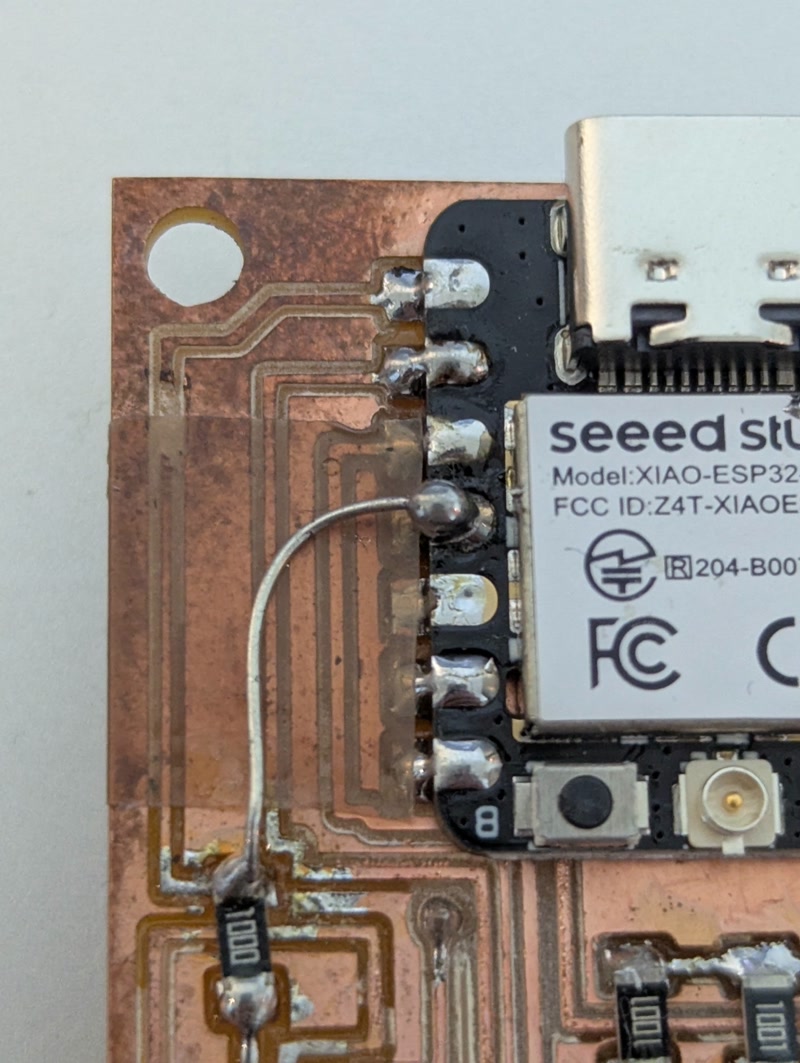
As a result, I abandoned using GPIO2 (D0) and decided to switch to GPIO5 (D3) instead.
Since I didn’t have enough time to redesign and re-mill the PCB, I cut the trace connected to GPIO2 and manually rewired the circuit by connecting GPIO5 directly using tinned copper wire.
With the following code, I was finally able to make the mini vibration motor vibrate when approach detection is triggered.
#define VIBRATION_PIN 5 // D3 = GPIO5
#define APPROACHING_PIN 3 // D2 → GPIO3(Approach Detection)
unsigned long vibrationStartTime = 0;
bool isVibrating = false;
void setup() {
pinMode(VIBRATION_PIN, OUTPUT);
digitalWrite(VIBRATION_PIN, LOW);
pinMode(APPROACHING_PIN, INPUT);
Serial.begin(115200); // For USB serial monitor
}
void loop() {
int isApproaching = digitalRead(APPROACHING_PIN);
Serial.print(isApproaching);
unsigned long currentTime = millis();
// The motor starts vibrating or extends its vibration time when approach detection is triggered
if (isApproaching == 1) {
if (!isVibrating) {
Serial.println("Motor High.");
digitalWrite(VIBRATION_PIN, HIGH); // Vibration ON
isVibrating = true;
}
vibrationStartTime = currentTime; // reset every time
Serial.println("!!! WARNING: Approaching detected. Vibrating...");
}
// Vibration stops after a certain period of time
if (isVibrating && (currentTime - vibrationStartTime >= 5000)) {
digitalWrite(VIBRATION_PIN, LOW); // Vibration OFF
Serial.println("Motor Low.");
Serial.println("Stop vibrating.");
isVibrating = false;
}
delay(100); // Read Interval
}Although the mini vibration motor now vibrates upon approach detection, there were times when the red LED used for approach detection (which is lit directly by the Doppler sensor) blinked, but the sensor values received by the XIAO ESP32-C3 did not match this activity.
This discrepancy made me suspect that the data retrieval method might be incorrect.
After reviewing the sensor’s manual, I found that there is a method for retrieving real-time sensor values via UART communication.
I decided to switch the implementation to use UART for real-time data acquisition.
I referred to this published code as a reference for setting up UART-based real-time communication.
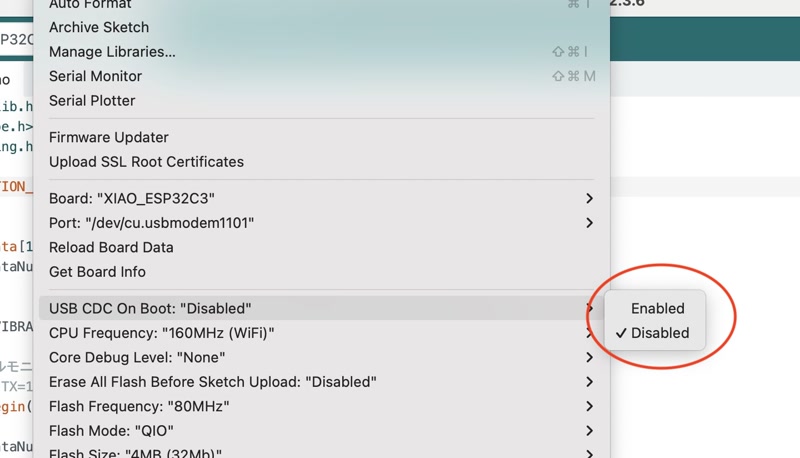
The UART output destination can be configured using the "USB CDC On Boot" option.
If this is set to "Enable", the UART data will be sent over the USB connection.
In this case, I set it to "Disable" so that the data would flow through the TXD/RXD pins (D6/D7) instead.
Using the UART-based real-time data acquisition code shown below, I was successfully able to synchronize the sensor's output values with the blinking of the red LED used for approach detection.
#include <stdlib.h>
#include <ctype.h>
#include <string.h>
#define VIBRATION_PIN 5 // D3 = GPIO5
char ReceiveData[12] ; // Buffer for receiving communication commands
int ReceiveDataNum ; // Communication command string length and receive flag variable
void setup() {
pinMode(VIBRATION_PIN, OUTPUT); // Vibration motor pin set to output
// Serial Monitor Settings
// (RX=6 TX=7 BaudRate=9600bps Data=8bit Parity=odd Stop=1bit Flow=none)
Serial.begin(9600,SERIAL_8O1) ;
ReceiveDataNum = -1 ;
}
void loop() {
int ans ;
// Receiving communication commands
ans = receiveCommand() ;
if (ans != -1) {
// Processing of received communication commands
processCommand(ans) ;
}
}
// Processes received communication commands.
// num: Character length of received command
void processCommand(int num) {
switch(ReceiveData[1]) {
case 'W':// Startup complete
digitalWrite(VIBRATION_PIN, HIGH) ;
delay(2000) ;
digitalWrite(VIBRATION_PIN, LOW) ;
// Set thresholds (aproaching=10m/leaving=10m)
setThreshold(999,999);
delay(2000) ;
// Set to moving object detection mode
setDetectionMode();
delay(2000) ;
break ;
case 'C':// Moving object approaching
digitalWrite(VIBRATION_PIN, HIGH) ;
break ;
case 'L':// Moving objects leaving
break ;
case 'N':// There's nothing to move
digitalWrite(VIBRATION_PIN, LOW) ;
break ;
case 'E':// error
break ;
}
}
void setThreshold(int sp,int sm) {
char buf[8] ;
// Send approaching threshold
sprintf(buf,"@SP%d\r\n",sp) ;
Serial.print(buf) ;
// Send leaving threshold
sprintf(buf,"@SM%d\r\n",sm) ;
Serial.print(buf) ;
}
void setDetectionMode() {
// Set to moving object detection mode
Serial.print("@T\r\n");
}
int receiveCommand() {
int ans , ret ;
char dt ;
ret = -1 ;
while(1) {
// If there is incoming data, process it
ans = Serial.available() ;
if (ans > 0) {
// read out 1 byte
dt = Serial.read() ;
// Start of communication command
if (dt == '@') ReceiveDataNum = 0 ;
if (ReceiveDataNum >= 0) {
// Buffer communication commands
ReceiveData[ReceiveDataNum] = dt ;
ReceiveDataNum++ ;
// End of communication command (CR/LF)
if (dt == '\n' && ReceiveData[ReceiveDataNum-2] == '\r') {
ret = ReceiveDataNum ;
ReceiveDataNum = -1 ;
break ;
}
}
} else break ;
}
return ret ;
}We uploaded the improved program to the ESP32-C3 and conducted a test to verify whether the vibration motor functions correctly when triggered by the proximity detection signal from the Doppler sensor.
The vibration motor was connected to the XIAO ESP32-C3 mounted on the PCB, and the Doppler sensor (NJR4265) was placed in a setting similar to the actual usage environment.
When the sensor is activated in proximity detection mode and detects human movement, the ESP32-C3 receives the signal via UART communication and sets the designated pin (GPIO5) to HIGH, turning the vibration motor ON.
All test items were passed successfully.
When the Doppler sensor detected proximity, the vibration motor immediately started operating, and it was confirmed that the motor automatically stopped when the signal ceased.
Additionally, there was no delay between the red LED lighting up on the sensor and the motor vibration, demonstrating highly responsive real-time control.
After integrating the vibration motor module into the final enclosure, we conducted a test to verify whether the system functions correctly under actual usage conditions.
The enclosure was fully assembled, including the XIAO ESP32-C3, NJR4265 Doppler sensor, and the vibration motor securely mounted inside. This test simulated real-world use, where the sensor detects movement from behind, and the vibration motor alerts the wearer inside the enclosed form factor.
All items were successfully verified.
The vibration motor responded immediately and consistently when proximity was detected by the Doppler sensor, even with all components enclosed. The vibration feedback was strong enough to be felt clearly through the final casing.
Sensor responsiveness and signal timing were not negatively affected by the enclosure. The internal mounting structure held the motor firmly in place without any loosening or shifting.
This confirms that the complete system performs reliably in its intended wearable configuration.
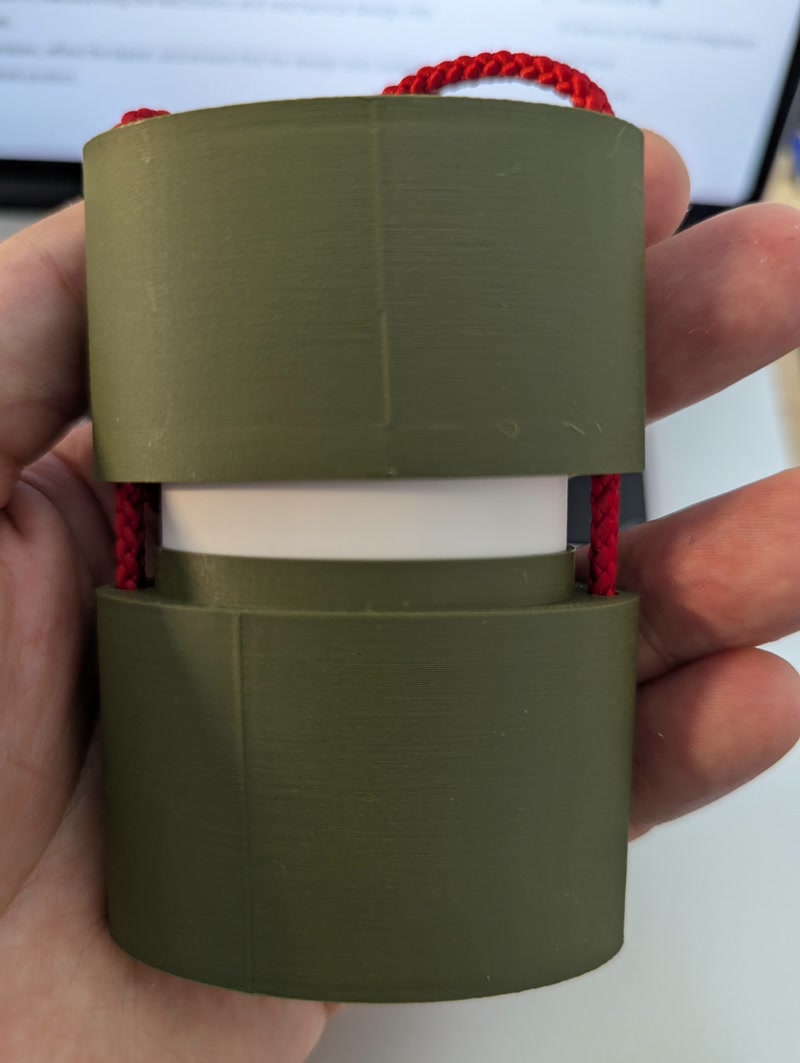
My final project, "Golgo 13 Machine," is a personal security device that uses a millimeter-wave radar sensor to detect people approaching from behind and alerts the user via vibration and smartphone notifications. The device is uniquely designed in the shape of a traditional Japanese inrō, blending cultural aesthetics with modern technology.
The project will be disseminated and made publicly available through the following methods:
All design files, source code, and documentation for this project will be released under the
Creative Commons Attribution-ShareAlike 4.0 International (CC BY-SA 4.0)
license.
This license allows anyone to freely reuse, modify, and distribute the work, provided that derivative works are also shared under the same license.
This project has the potential for the following future applications:
To turn these possibilities into reality, I plan to:
I created the following presentation slides using Canva.
I created the following presentation video using Canva and Veed.io.
Throughout this project, I have learned:
I would like to express my sincere gratitude to Yuichi Tamiya, our local evaluator and instructor from FabLab Kannai, for his continuous guidance and support throughout the program.
I also want to thank Isaac Robles, who was in charge of the Global Evaluations, for his helpful feedback and kind encouragement during the final review process.
In addition, I am grateful to my teammates at FabLab Kannai for encouraging me during our on-site sessions and supporting the progress of my documentation and final project:
Thank you all for being a part of this journey!