System Integration
Assignment 16 - Fab Academy Barcelona


This week we focused on system integration, or how our final project (or any project) should come together. This includes design, packaging, testing, failure modes (mechanical, wiring, components, power, software, scaling, manufacturing, organization collaboration, etc), and product lifecycle. See more here.
Bill of Materials
I'll use the following materials to build by board. I'll revisit and upate this list as I go. The below assumes I make 2 sensors (one to be worn on each side of the body).
| Component | Info / Model Number | Quantity | Supplier | Product Code | Unit Price | Total Price |
|---|---|---|---|---|---|---|
| ToF board | VL53L0X | 2 | Adafruit | 3317 | $14.95 | $29.90 |
| Esp32c3 MCU | ESP32-C3 | 2 | Seeed | 113991054 | $4.99 | $9.98 |
| Haptic Motors | 1597-1244-ND | 6 | Seeed / Digikey | 316040001 | $1.46 | $8.76 |
| Mosfets | 2N7002L | 6 | Digikey | 2N7002L | $0.08 | $0.48 |
| 10k Ohm Resistors | RC0603FR-131KL | 6 | Digikey | RC0603FR-131KL | $0.02 | $0.12 |
| 100 Ohm Resistors | RC0603FR-7W100RL | 6 | Digikey | RC0603FR-7W100RL | $0.01 | $0.06 |
| 4mm Magnets | S-04-01-N | 20 | Supermagnete | 7640155437011 | $0.28 | $5.60 |
| 3D printed & molded silicone housing | NA | 2 | Provided by Fab Lab | NA | $2.50 (est) | $5.00 (est) |
| PCB Board | NA | 2 | Provided by Fab Lab | NA | $0.25 (est) | $0.50 (est) |
| Total Cost | $60.40 | |||||
System Design & Failure Consideration
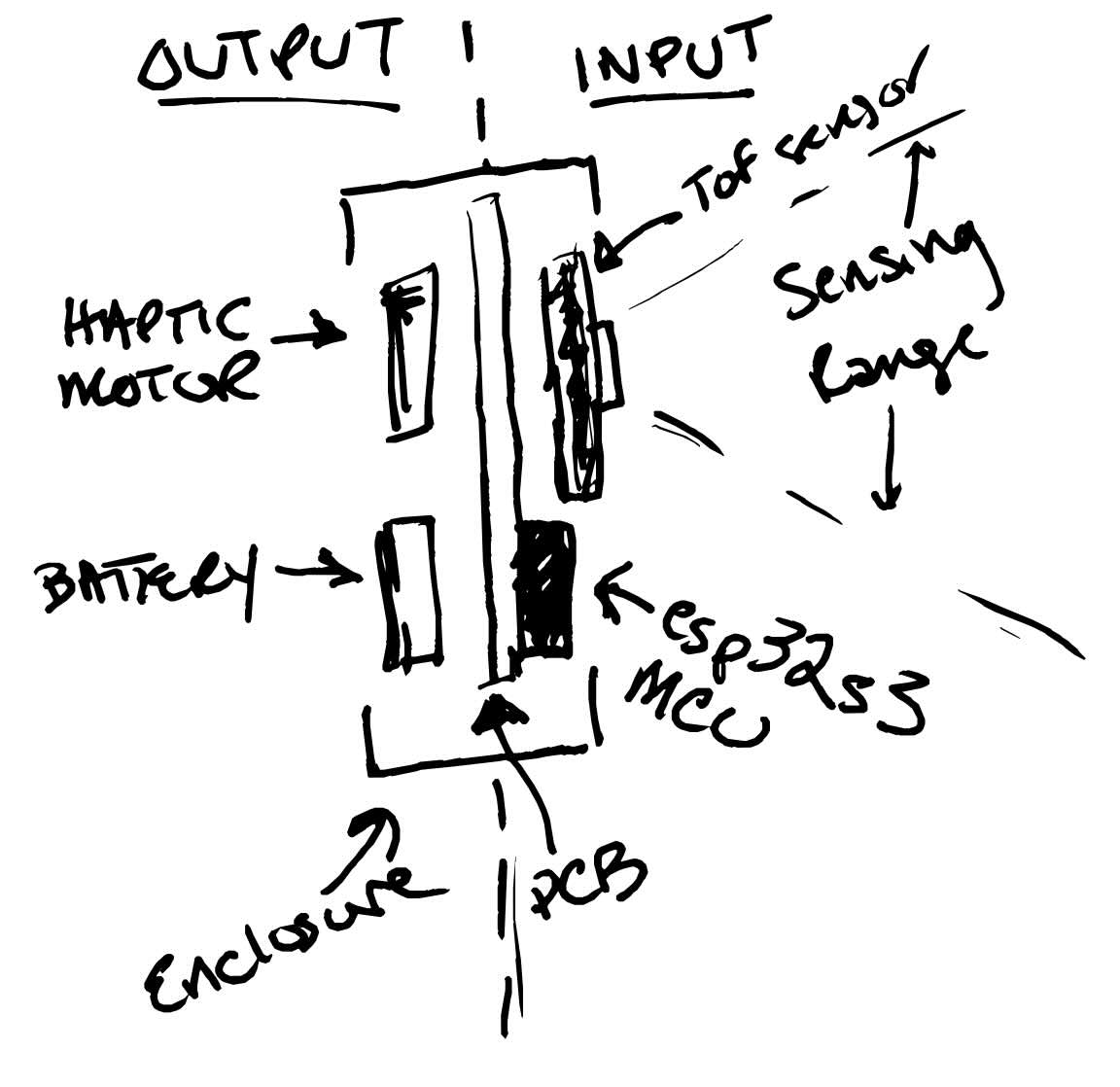
I've decided to keep the v1 design as simple, modular, and self-contained as possible, to reduce probability of failure, ease debugging, and optimize (minimize) power consumption. Each sensor will be fully autonomous, with its own power source (battery), MCU (esp32s3) - with all logic loaded, and integrated input and output capability. The MCU and board will attach to 3 compontents - (1) the ToF sensor for input, (2) haptic motor (or motors) for output, and (3) battery. The programming (see below) will read the input from the ToF sensor and transform this into a pattern of vibration in the haptic motors.
Design Sketch
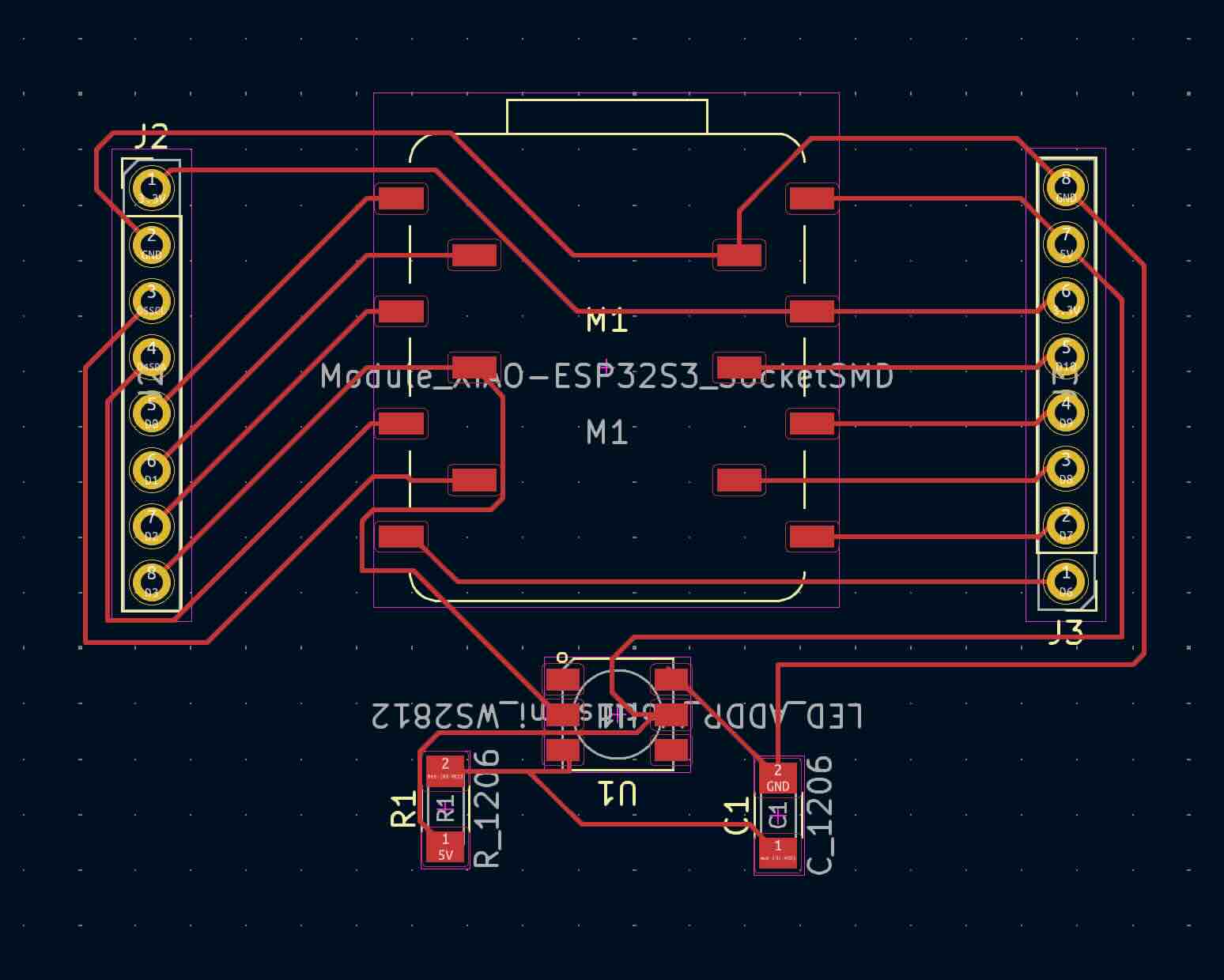
Board Design
Thus far I'm using a dev board with the esp32s3 MCU. Details on that board are avaiable in Outputs Week, but I've included the board design with the esp32s3 MCU below as well. It's likely I'll make another board more specifically tailored to this project.
Programming Microcontroller
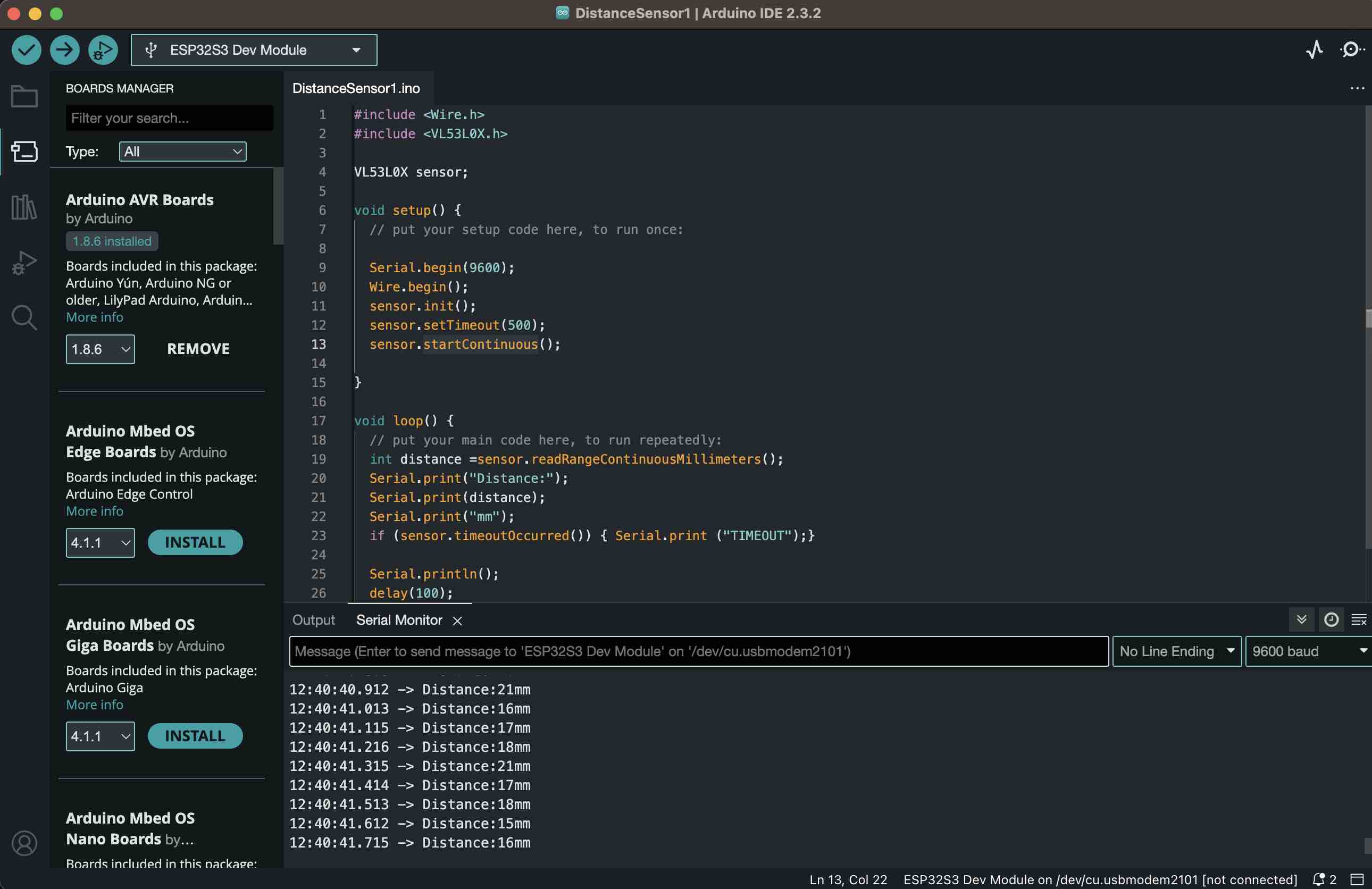
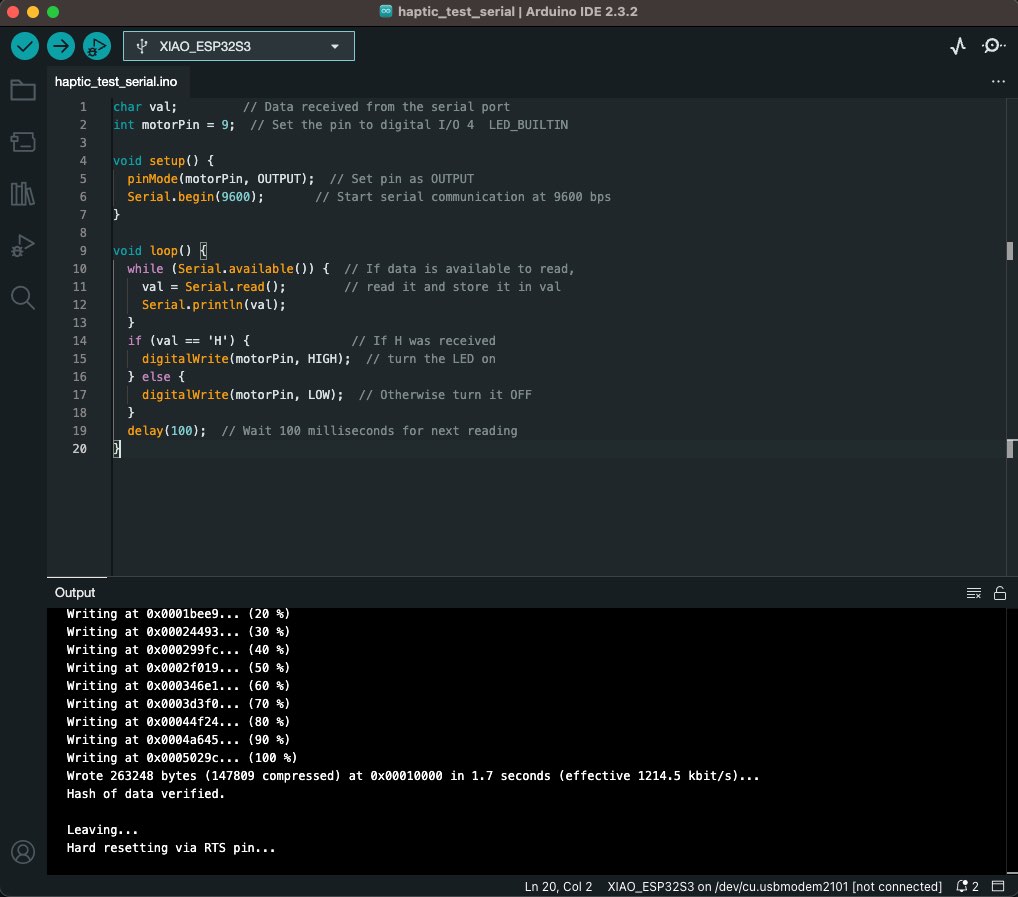
I'll integrate a single program that reads the distance from the sensor and then transforms that into a pattern of vibration for the haptic motor. To read the sensor I'll use code similar to that used in inputs week (see below).To vibrate the haptic motor, I'll adapt similar code to that used in Interface & Application programming week (see below). I will have to adapt the input to be a linear transformation of the distance vs. binary (on/off). Finally I'll integrate these both into a single program.
WEEK 11 PROGRAM READING ToF SENSOR
WEEK 14 PROGRAM READING ToF SENSOR
Housing
I am still considering how I will hosue my product. The biggest hurdle is that it needs to stay relatively still in terms of the direction the sensor is facing with respect to the body, and it also ideally can be worn over clothes. For people with long hair as well it should be able to be worn on a part of the body where the hair won't trigger the sensor. My most recent thinking is to use a pin on device. I also would like to make at least 2, perhaps worn on each shoulder blade. I'm therefore considering a wing theme. See mockups generated iwth the help of ChatGPT.
Connectivity
For my first version (first "spiral") there will be no interconnectivity between devices. Each will work locally and the MCU will contain all necessary logic and programming. However, I've chosen the esp32s3 so that I have the option to integrate and communicate with a central app (e.g. on a smartphone) in future versions / spirals.