- Questions
- Proposal
- Research
- Design & development
- Project requirements
- System diagram
- BOM
- Detailed schedule
- When is it succesful
- Links
Applications and Implications
This week is about bringing structure into the final project final phase. Planning and decisions!
I also made some good process on my final project development, which was nice. I designed, laser cut and assembled an easle which is a pretty important part of my final project. I also managed to control two stepper motors with sensor data sent over BLE, and got some first jittery motion.
Questions
The assignment for this week is to answer the following questions:
- What will it do?
- Who has done what beforehand?
- What will you design?
- What materials and components will be used?
- Where will they come from?
- How much will they cost?
- What parts and systems will be made?
- What processes will be used?
- What questions need to be answered?
- How will it be evaluated?
Proposal
What will it do?
I am making a five bar linkage plotter that moves based on variable resistance input from knitted sensors. It translates the manipulation of textiles directly into brush strokes. You have to figure out new ways to get the plotter to do what you want in a human/machine collaborative effort.
The installation consists of an easle on which a rectangular canvas is mounted. The five bar linkage mechanism is connected with the base bar to the back of the canvas, while the four other arms can be moved freely with the two stepper motors on the left and right sides of the canvas. It’s basically an offline live controllable modular brush plotter. As you’re interacting with the installation, you become part of a human/machine performance.
Here you can see the first prototype in action:
Why?
The project tries to capture different ways of motion and interaction and translates this into visuals. How do you translate pulling, squeezing, stretching into something permanent? It forces you to look at the relationship between your actions and what’s happening on a canvas, and figure out how to work together with the machine.
I like the possibilities that the modularity of the sensors give this project. The core of the project is the easle and the canvas. I see this as a project on which I can keep building:
- more brush modules and do deep dives into brush strokes
- make brushes myself to add to those modules
- more textile input modules and look into how people interact differently with different objects and materials
- I can replace a knitted sensor with an LDR (for example) which makes the interaction with the machine very different (touch versus gesture)
- I can make the input devices more like objects, and then you can interact with the installation with more people simultanously and translate the collaborative effort into a single work (like a jam session)
- And I can experiment endlessly in their combinations!
I think it’s playful and fits my chaotic energy.
I don’t believe in perfect machines. I like to take the personality of a machine into account when designing. I see the machine as a partner in any design process, because there is always things that pop up unexpectedly that can influence your direction radically. Instead of trying to force a machine to work exactly how I have it in my head, I like to embrace the ghost in the machine.
This is also why I found it so hard to plan this machine. I work in a way that is influenced heavily by what I see happening in front of me. If there is something unexpected that I can use, I will gladly change course. This is also my pitfall though because I can keep changing my idea without finishing anything.
Features
Must-haves:
- A five bar linkage system that runs smoothly and covers an area of around 50x70cm
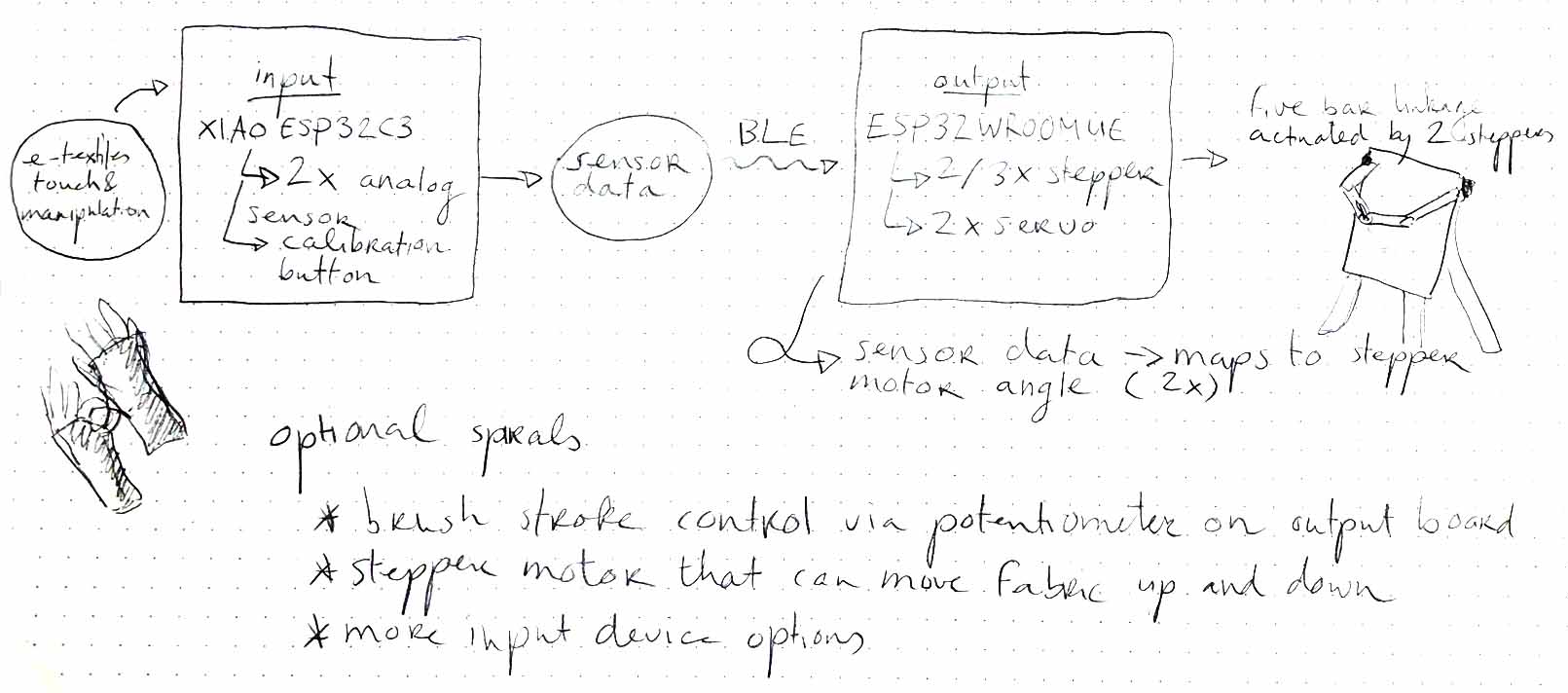
- Two knitted conductive gloves connected to a PCB on which the analog resistance values are mapped to stepper motor angles
- Bluetooth communication of these values to the plotter PCB
- One brush module in which you can place any pen or brush
- Good looking visuals
Nice-to-haves:
- A brush module with an integrated servo motor to have a more interesting brush stroke
- A canvas on a belt controlled with a third stepper motor that can turn the plotter into a print machine
- Various other knitted sensors to explore different interactions with the material
- An ink reservoir to which the stepper motors move when a button is pressed on the input device board
- LDR module
- Potentiometer module
- More modules
- Some kind of repeatability by having a default set of patterns and motions, like drawing a bunch of circles next to each other, and then if you interact with the sensors the path deviates
Possible names
I guess the installation can have different names depending on what sensors are being used.
- Motion Translation Machine
- Textile Touch Translator
- Touch To Image
- …
Research
Who has done what beforehand?
This question is answered here.
Design & development
What parts and systems will be made? (preferably make rather than buy)
Parts made:
- Easle
- ‘Canvas’ with 5 bar linkage arms
- Main output devices PCB
- 2 stepper motor PCB modules
- Knitted sensors
- Main input devices PCB
Parts bought:
- Brushes & pens
- Fabric & paper on which to draw
Project requirements
This table is to keep track of all project requirements and in which ways these are satisfied, and to answer the question:
What processes will be used?
Design
| 2D design | 3D design | Electronics design |
|---|---|---|
| Fusion360: design of linkage bars | Fusion360: design of the easle and all components | KiCad: all PCB designs |
| Lightburn: modification of lasercut parts | Slicer for Fusion360: translation of easle 3D model to lasercuttable model | |
| Illustrator: modification of PCB designs, nesting of sliced parts for laser cutting |
Fabrication processes
| Additive fabrication processes | Subtractive fabrication processes | Electronics production |
|---|---|---|
| 3D printing: all 3D components on the plotter, printed with Prusa MK3S in PLA | Laser cutting: easle, linkage bars, brackets to keep back bar in place | Milling all PCBs on the Roland MDX-20 |
| Machine knitting: knitting the sensors | Next spiral: CNC milling the easle for more stability |
Embedded μc interfacing and programming
| Embedded microcontroller interfacing | Embedded microcontroller programming |
|---|---|
| XIAO-ESP32 embedded in input devices board | Programmed via native USB-C port in Arduino IDE |
| ESP32-WROOM32E embedded in output devices board | Programmed via FTDI pins embedded in the circuit with a SAMD21C serial bridge |
System integration and packaging
- 3D printed cover for electronics on the back of the plotter
- Cable covers on back of the plotter
- Embedded stepper motor PCB on the back of the motors
- 3D printed cover for electronics hidden in a knit
- Knitted cable covers for input devices board
System diagram
BOM
This part will answer the questions:
What materials and components will be used? Where will they come from? How much will they cost?
This question is answered here.
Detailed schedule
I started out with this schedule like this, but it’s not super clear yet so I made a to do list that is a bit more elaborate and is sorted from important to less important. There are already tasks done before like the design and production of the electronics, so they are not included in this schedule.
| Deadline | Task | Notes |
|---|---|---|
| April 22 - 28 | Build mechanical prototype, make ESP WROOM board with stepper motor drivers | |
| April 29 - 30 | Build first modular brush system | |
| April 26 - May 3 | Networking and communications: figure out BLE to send data | |
| May 10 - 16 | Wildcard week: e-textiles input devices with knitting | |
| May 22 | Send continuous stream of sensor data of two sensors to output device board | |
| May 22 | Control two stepper motors over BLE with sensor data of two sensors | Doesn’t work very well yet |
| Friday May 25 | Design and print brush module | |
| Saturday May 26 | Figure out best speeds and rotation angles; absolute or relative positioning | VERY IMPORTANT |
| Monday May 29 | Knit more sensors (scarf, finish mittens, fill an object) | |
| Tuesday May 30 | Add brush lifting mechanism with high torque servo motor | This may take a few days |
| Wednesday May 31 | Add capacitive touch or velostat button to activate brush lifting mechanism | |
| Friday June 2 | Add ink reservoir to bottom | |
| Sunday June 4 | Program brush dipping in ink reservoir | |
| Monday June 5 | Figure out an elegant way to connect the sensors to the board | Knit some cable covers and print a case for the board (and maybe knit a cover) |
| Tuesday June 6 | Mill definitive easle |
Indentation indicates subtasks.
- Control two stepper motors over BLE with sensor data of two sensors
- Send continuous stream of sensor data of two sensors to output device board
- Make the steppers move with that sensor data
- Figure out best speeds and rotation angles; absolute or relative positioning
- Make the steppers move nicely with that information, making sure that there is a clear correlation between interacting with a sensor and what happens on the machine
- Make definitive brush module
- Design new version that snaps in place
- Design a version with a small stepper mounted on
- Make brush lifting mechanism with servo motor
- Design mechanism
- Print parts
- Program mechanism
- Make definitive easle
- Modify design so that the canvas snaps in place
- Pick nice wood
- Mill definitive easle
- Sand and assemble easle
Up until above is necessary, below are nice to haves.
- Add ink reservoir module
- See if I can program the steppers to go to a specific place and do a dipping motion
- Design module
- Add rolling fabric module to the top
- Design a fabric roll holder
- Control it with a stepper motor
- It can be programmed or controlled with another sensor
Even though I want the machine to have various modules, my goal during Fabacademy is to have it working with one input module and one brush module at least; after that I can continue with new modules.
When is it succesful
What questions need to be answered?
These are the things I need to figure out or learn to be able to make your final project.
- How do you send data over BLE between devices?
- How do you program an ESP WROOM?
- How do you control multiple stepper motors?
- How do you deal with gravity and torque?
- How do you transform a servo motor’s rotational energy into a linear motion divided over a much larger area?
- How does a five bar linkage plotter work?
- How do you make a stable machine with moving elements?
- How do you create a knitted sensor with stable analog resistance readings?
How will it be evaluated?
These are the elements of my project that must work successfully in order for it to be considered a success
The installation is succesful if:
- I can create visually interesting plot drawings on textiles
- The installation is captivating and easy to interact with
- The two stepper motors are controlled via BLE and have a clear connection in their motion with the interaction with the sensors
- The installation is stable and looks like it’s made with care
Next spiral: turn it into a pattern/print plotter with a roll of material that keeps going