
Assignment
- Add a sensor to a microcontroller board that you have designed and read it.
In this week I have palned to use the PIR sensor to detect the Object like human. when object is near to the PIR then It indicate the LED that Object is Near to the Devices.
What is PIR Sensor.
PIR sensor detects a human being moving around within approximately 10m from the sensor. This is an average value, as the actual detection range is between 5m and 12m.PIR are fundamentally made of a pyro electric sensor, which can detect levels of infrared radiation. For numerous essential projects or items that need to discover when an individual has left or entered the area. PIR sensors are incredible, they are flat control and minimal effort, have a wide lens range, and are simple to interface. HERE
How PIRs Work
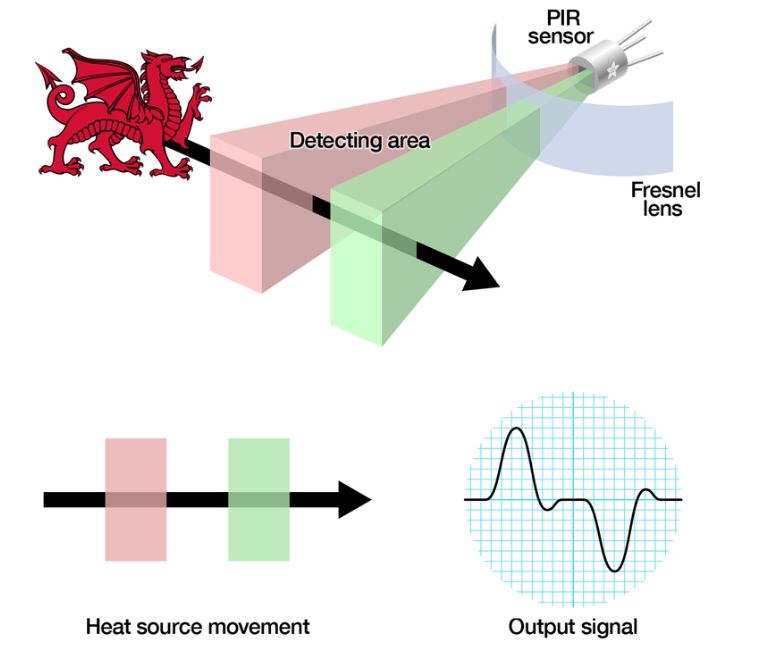
PIR sensors are more complicated than many of the other sensors explained in these tutorials (like photocells, FSRs and tilt switches) because there are multiple variables that affect the sensors input and output. To begin explaining how a basic sensor works, we'll use this rather nice diagram HERE .
The PIR sensor itself has two slots in it, each slot is made of a special material that is sensitive to IR. The lens used here is not really doing much and so we see that the two slots can 'see' out past some distance (basically the sensitivity of the sensor). HERE When the sensor is idle, both slots detect the same amount of IR, the ambient amount radiated from the room or walls or outdoors.
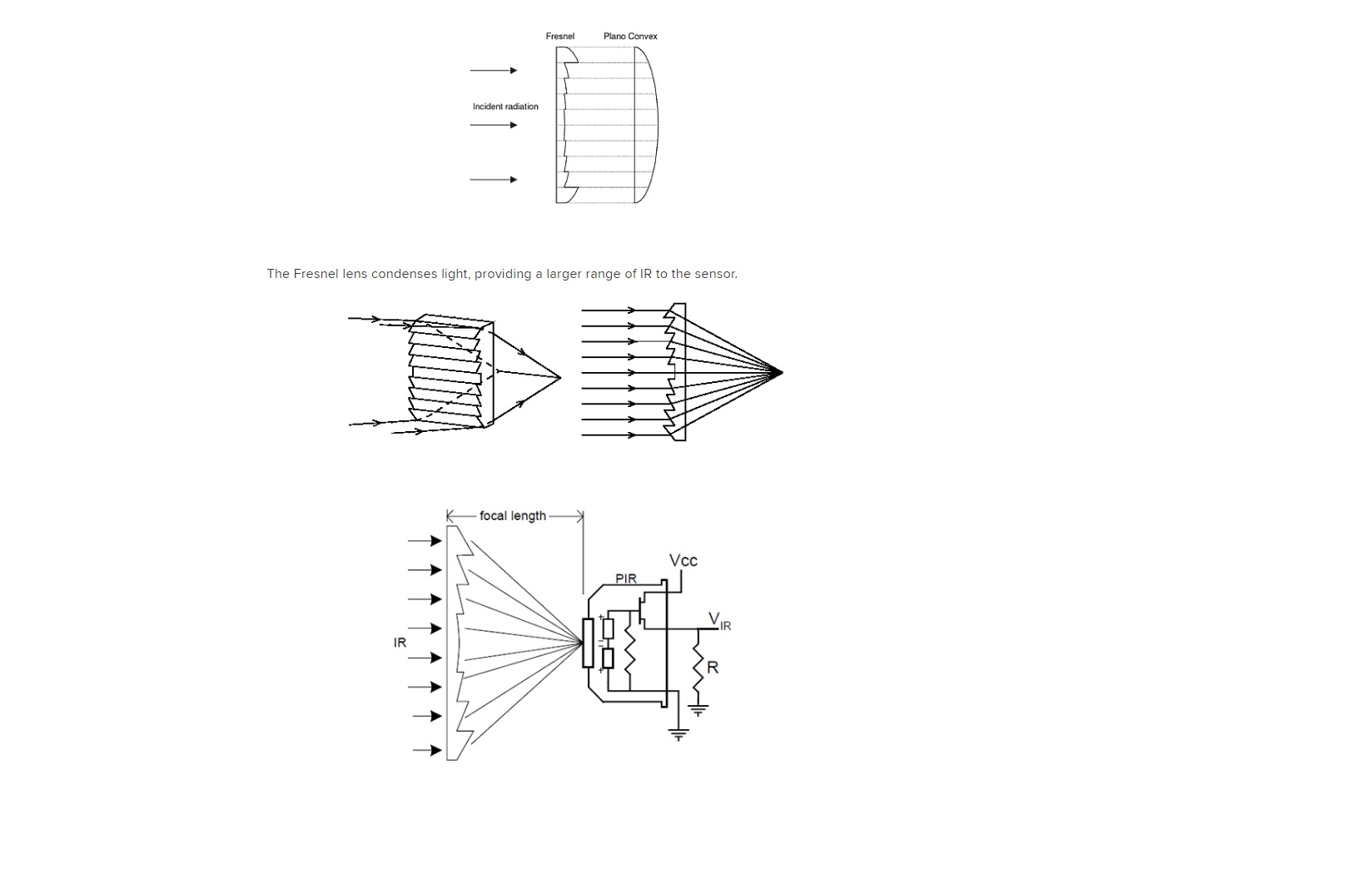
Lenses
PIR sensors are rather generic and for the most part vary only in price and sensitivity. Most of the real magic happens with the optics. This is a pretty good idea for manufacturing: the PIR sensor and circuitry is fixed and costs a few dollars. The lens costs only a few cents and can change the breadth, range, sensing pattern, very easily. In the diagram up top, the lens is just a piece of plastic, but that means that the detection area is just two rectangles. Usually we'd like to have a detection area that is much larger. To do that, we use a simple lens such as those found in a camera: they condenses a large area (such as a landscape) into a small one (on film or a CCD sensor), HERE :
Areas of Applications of PIR Sensors
Features
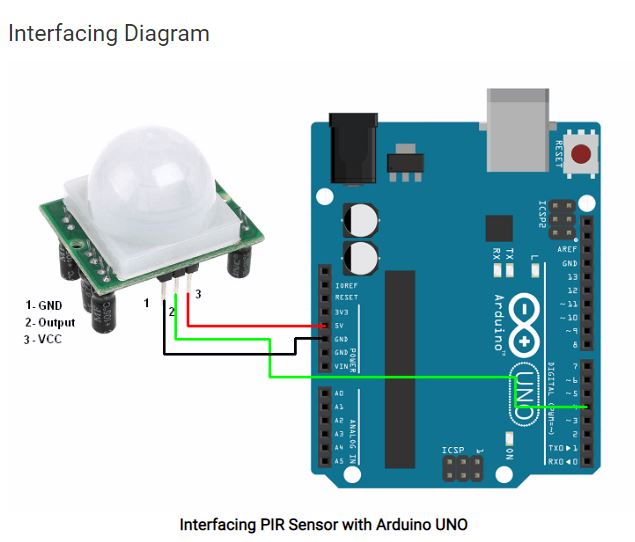
Interface of PIR Sensor With Uno
I have Research for PIR so I have Found this Help ful link , its is very easy for the Learner HERE
I Design the Lenardo baord in the Week of Embedded System I have replace the Uno with Leonardo Board.
Pin Interface of PIR sensor With Leonardo
PIR Has three Pins
PIR Sesnor Interface With Leonardo
This the PIR Interface with Leonardo
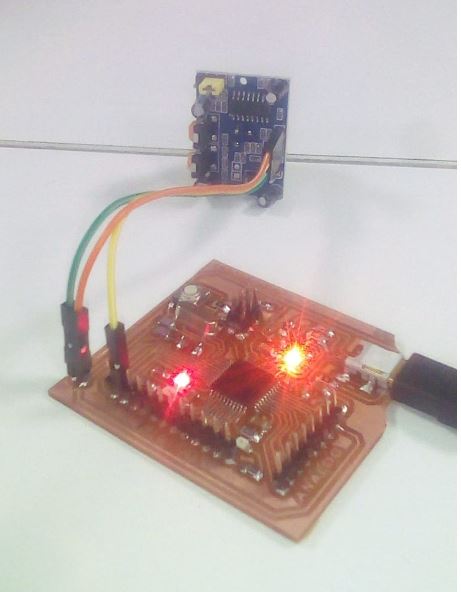
When Sensor detect the Object then LED will blink if object is out of range then LED is Off satte.
I have design this and upload in Leonardo Borad
Demo of the Input Devices
In Demo I have use my Phone as Object When its Near to the Sensor the LED is blink other Voice LED goes to Trun off.
Group Assignments
In This week for the Group Assignment we have use the Distance Sensor to Measure the Distance.So we have use the HC-SR04.So we have Interface Disatnce Sensor With Leonardo
Ultrasonics Sensor HC-SR04
Ultrasonic transducers and ultrasonic sensors are devices that generate or sense ultrasound energy. They can be divided into three broad categories: transmitters, receivers and transceivers. Transmitters convert electrical signals into ultrasound, receivers convert ultrasound into electrical signals, and transceivers can both transmit and receive ultrasound. In a similar way to radar and sonar, ultrasonic transducers are used in systems which evaluate targets by interpreting the reflected signals.
It emits an ultrasound at 40 000 Hz which travels through the air and if there is an object or obstacle on its path It will bounce back to the module. Considering the travel time. CLICK Distance Sesnor Interface with Leonardo and test the Code.
This is the Code of Sensor to read the Distance, While Object near to the target
With the Objects
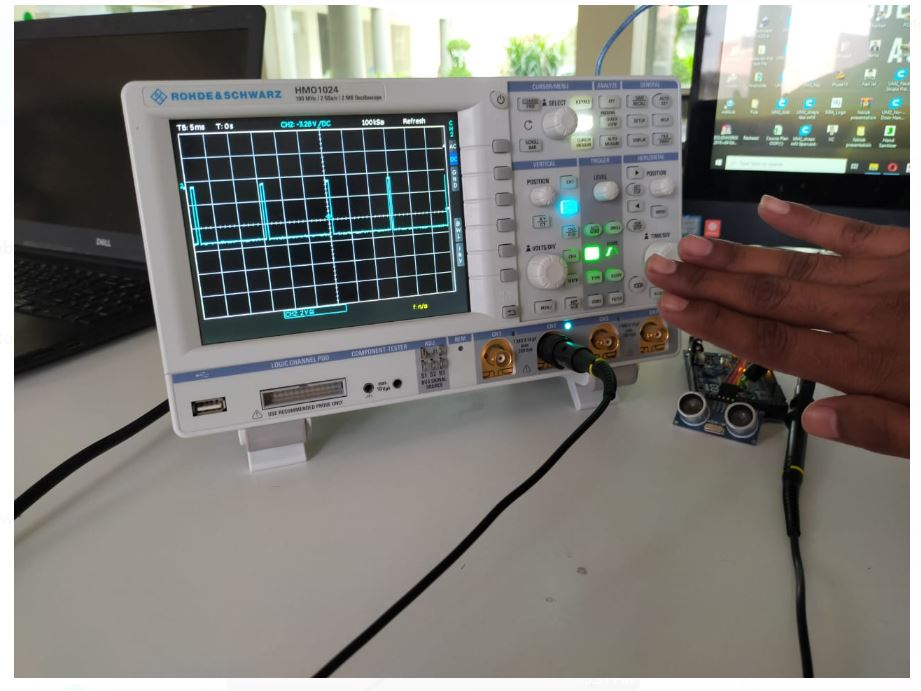
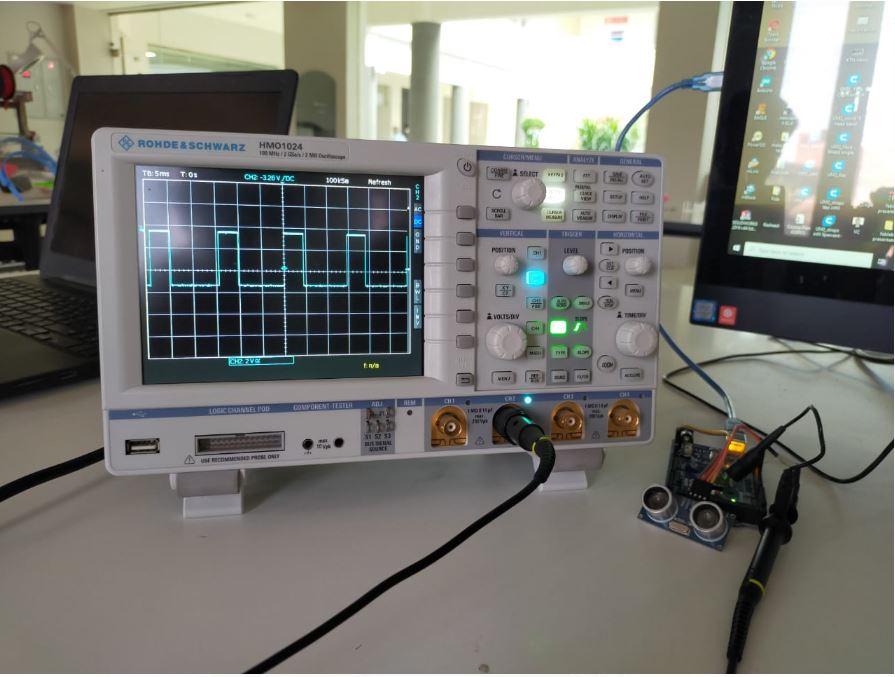
Results :
In our group assignment, we have to use the HC-SR04 sensor to measure the distance, we use the oscilloscope to see the graphs, for this job we consider two conditions first when the object is not near to sensor than the wave is square with 40% to 60% duty cycle, and when an object comes to target than the square wave decrease the duty cycle and reached to 5% to 10%. in the same way when the target changes its place from the origin the wave is going to change.
Conclusion
This week I have learned about the PIR and Distance sensor working and interface with Leonardo. and find that How sensors read the Object or Distance when it's near to target more detail is mentioned on results. This week very informative for the Learning for the sensing point.
Download all files from Here

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License