12. Output devices¶
This week I worked on defining my final project idea and started to getting used to the documentation process.
This weeks Assignment: ¶
-
Individual assignment:
-
Add an output device to a microcontroller board you’ve designed,and program it to do something.
-
Group assignment:
-
measure the power consumption of an output device.
For this weeks group assignment you can check our page by clicking here
First part:(individual assignment) : ¶
For this weeks assignment I choose to work with a servo motor with a potentiometer as an output device .
So, what is an output device
*An output device is any piece of computer hardware equipment which converts information into human-readable form. ... Some of the output devices are Visual Display Units (VDU) i.e. a Monitor, Printer, Graphic Output devices, Plotters, Speakers etc.
what does sensor mean?
* A sensor is a device, module, machine, or subsystem whose purpose is to detect events or changes in its environment and send the information to other electronics, frequently a computer processor. A sensor is always used with other electronics it responds to a physical stimulus (such as heat, light, sound, pressure, magnetism, or a particular motion) and responds to it in a distinctive manner.
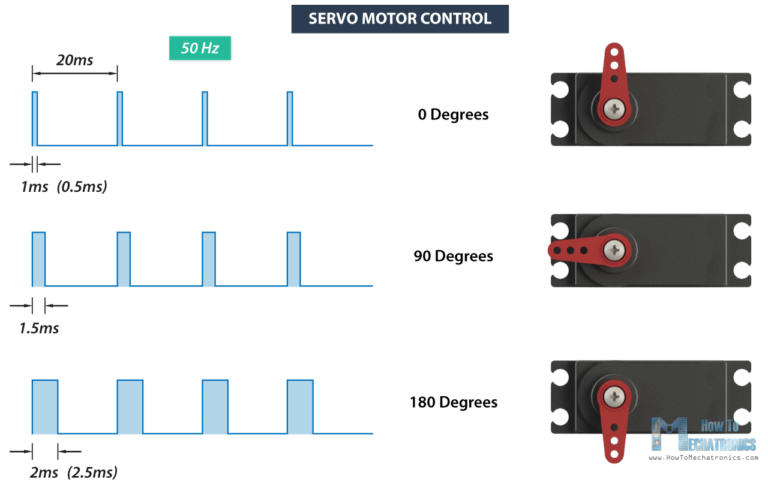
How does servo motor works:
Servos are controlled by sending an electrical pulse of variable width, or pulse width modulation (PWM), through the control wire. There is a minimum pulse, a maximum pulse, and a repetition rate. A servo motor can usually only turn 90° in either direction for a total of 180° movement.


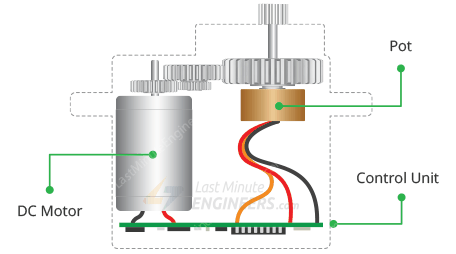
What is a potentiometer used for?
The measuring instrument called a potentiometer is essentially a voltage divider used for measuring electric potential (voltage); the component is an implementation of the same principle, hence its name. Potentiometers are commonly used to control electrical devices such as volume controls on audio equipment.
Let’s start:
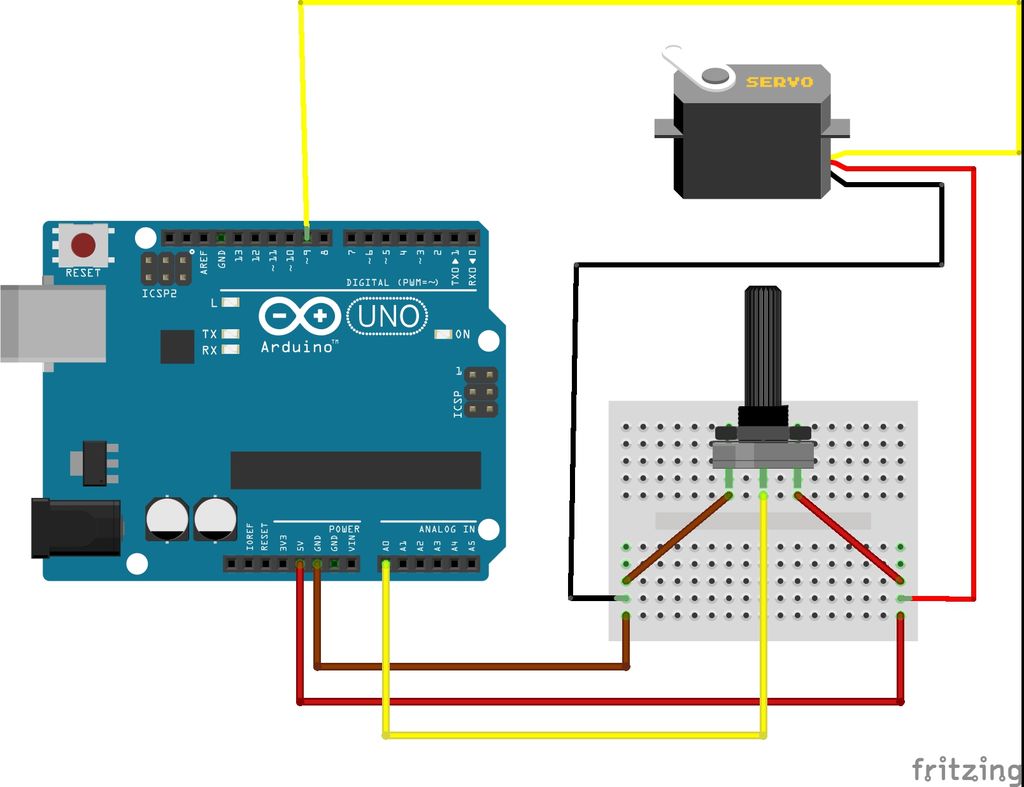
- Use the jumper cables to link the arduino to the servo motor and the potentiometer, following the steps below:
1- For the sevo motor:
- GND/GND
- VCC/5V
- PWM/PIN 9
2- Potentiometer:
- GND/GND
- VCC/ 5v
- Signal/ PIN A0
-
Now, Open the IDE and attach the arduino to the laptop .
-
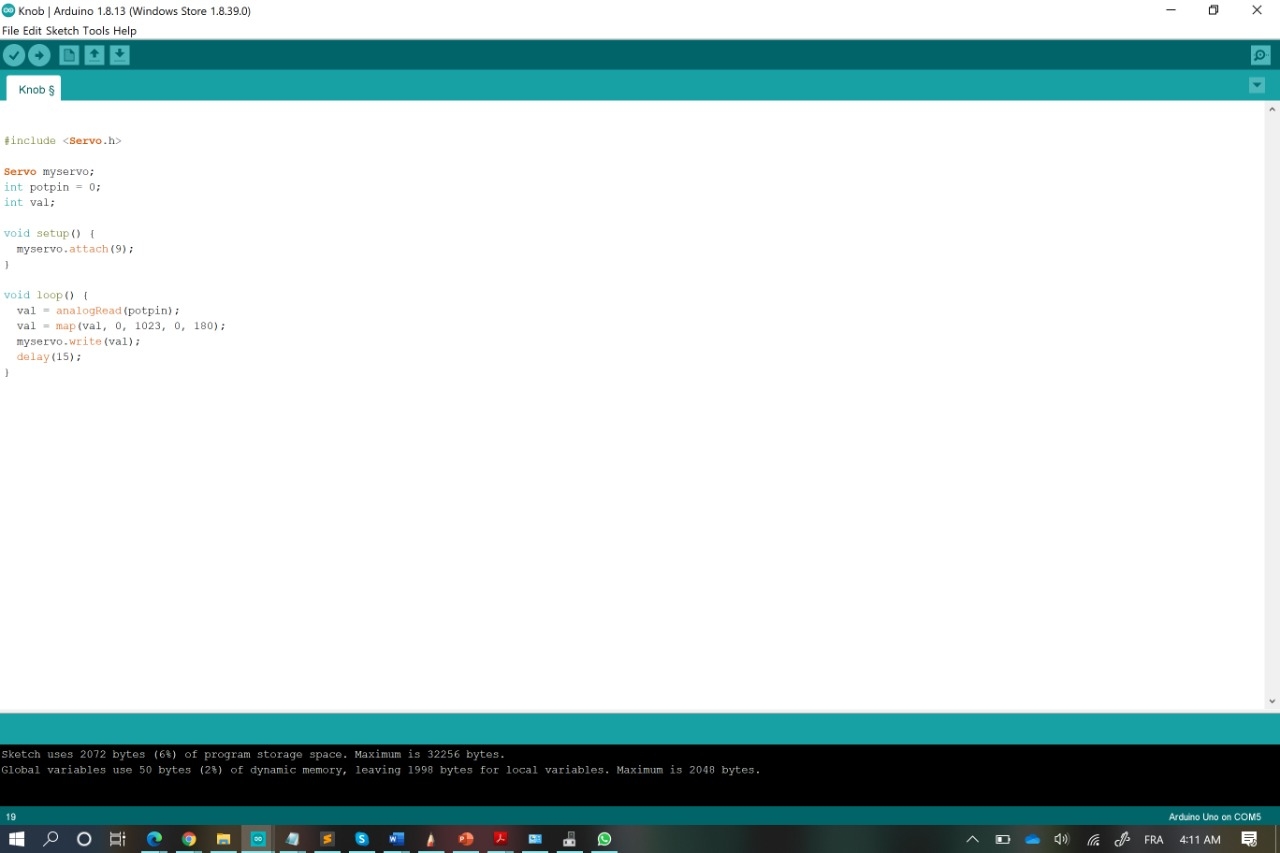
Go file / New and write the code below:
#include <Servo.h>
Servo myservo;
int potpin = 0;
int val;
void setup() {
myservo.attach(9);
}
void loop() {
val = analogRead(potpin);
val = map(val, 0, 1023, 0, 180);
myservo.write(val);
delay(15);
}
- Upload the code to the arduino :
- The job is done ^^
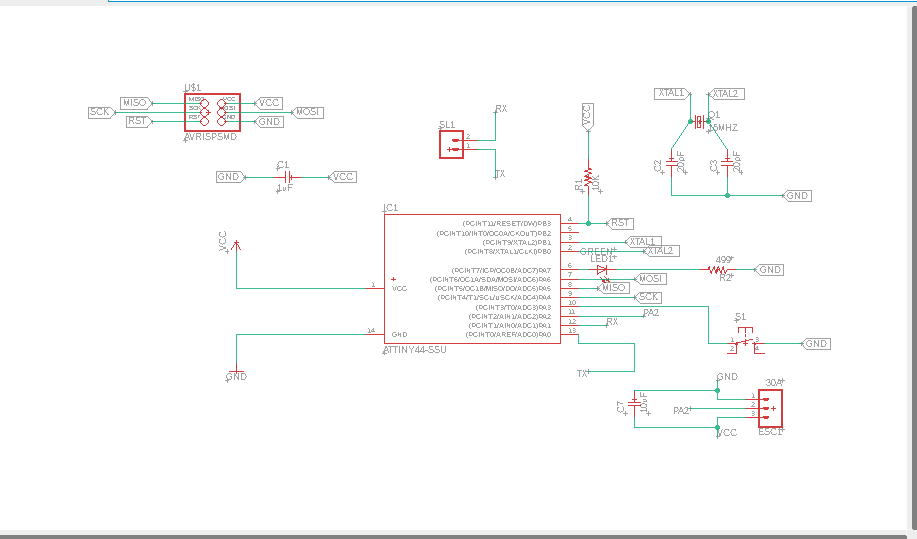
I tried to produce another new board for my output week in which I used the Attiny44 microship and the following parts:
- 20 Mhz resonator
- Capacitors 1uF
- 2 resistors 10k and 499ohm
- 6 header Pins for programming(ISP)
- 2 headers pins connector for the ftdi (RX AND TX)
- 3 headers pins for the ESC 30A of the brushless motor
- 10uF capacitor As it shown below :
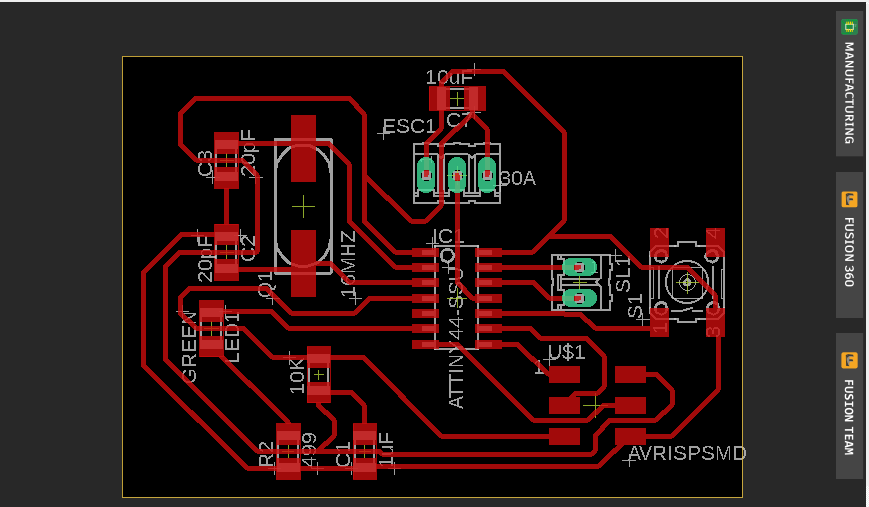
This is the final board after linking all the parts together :
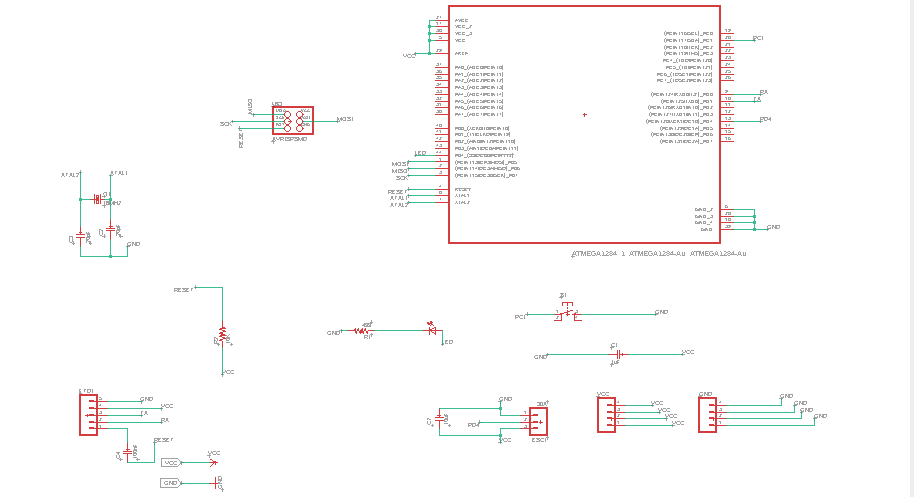
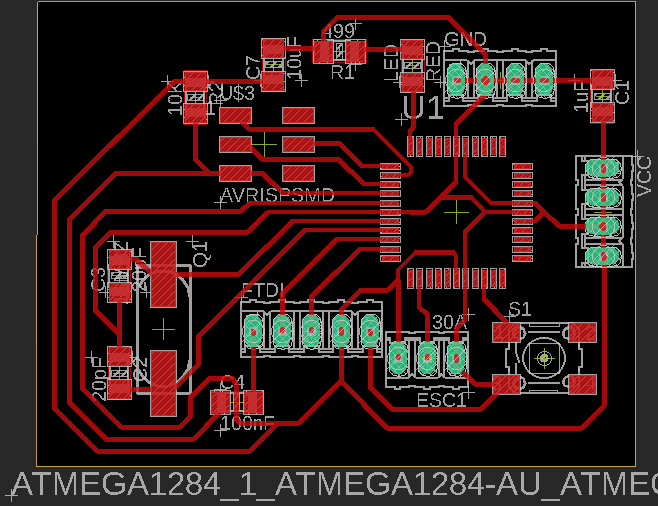
Unfortunatly, due to some reasons in my country I coudn’t find some of the SMD parts inclusing the Attiny44 for that reason, I tried to use another Micro controller which is the Atemega1284P and reprouced the card from the beginning , I kept the same componants as in the previous card and onlay I made some small changes as it is shown below :
- 16 Mhz resonator
- Capacitors 1uF
- 2 capacitors 10 uF
- 2 20 pF and 100 nF capacitors
- 2 resistors 10k and 499ohm
- 6 header Pins for programming(ISP)
- 5 headers pins connector for the ftdi (RX , TX , RESET , VCC AND GND )
- 3 headers pins for the ESC 30A of the brushless motor
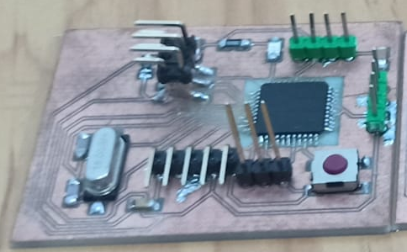
Here is the result I got after I linked all the parts together :
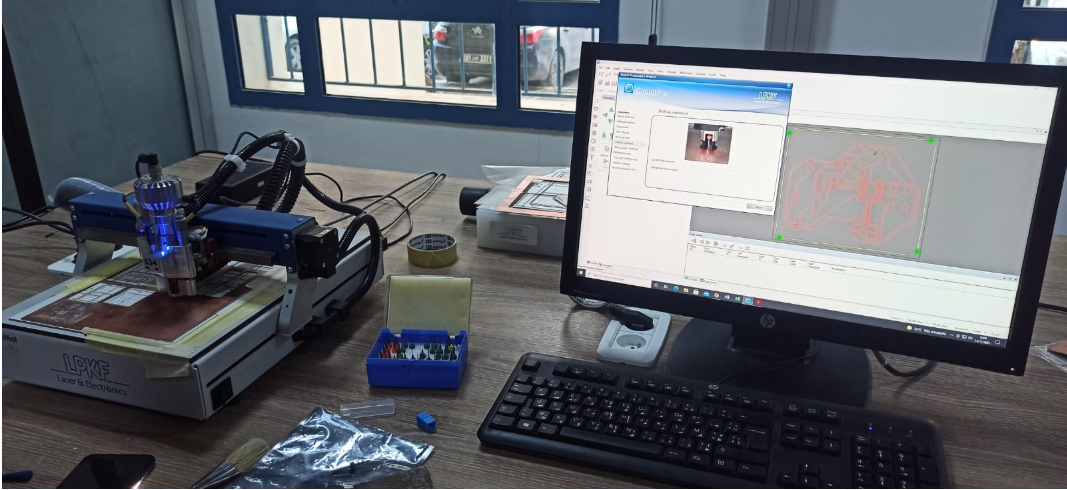
After that I used the LPKF the PCBs milling machine to produce my card :
The final step is to solder all the partes including the Atmega1284P:

Before all you need to select the appropriate microchip in arduino IDE as I explained the steps in my previous week10
Let’s start :
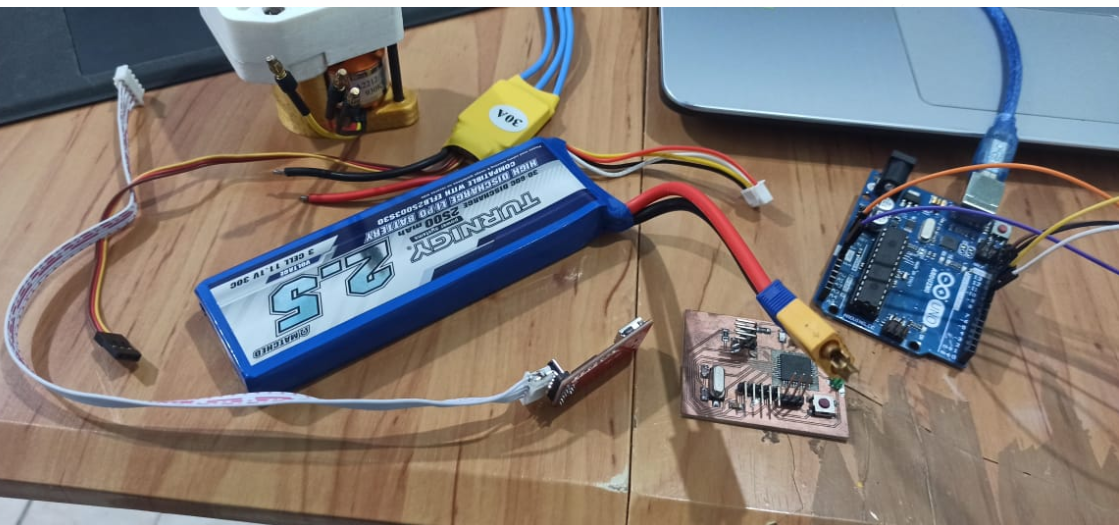
Prepare all the needed parts which are :
1- The brushless motor
2- ESC 30A
3- FTDI CABLE,ARDUINO and jumpers cables
4- The board
5- The lipo battery
After connecting my card to arduino then to the laptop and selecting the appropriate microchip up in ARDUINO IDE - Tools - Mighty-1284p boards - avr-developers.com pinouts 16MHZ using optiboot and the programmer : arduino as ISP I burned the bootloader successfully.
Here are the suitable connections with the arduino
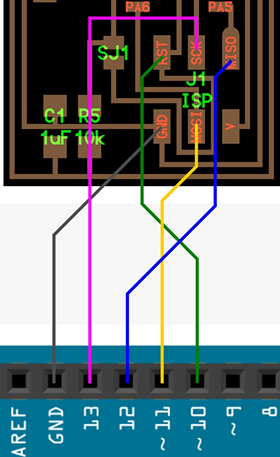
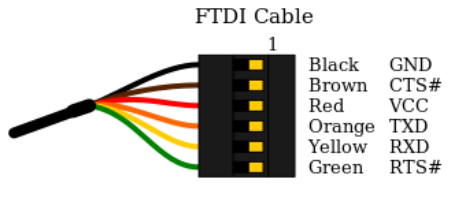
After I burned the bootloader I disconnected my board from the arduino then, I used the ftdi connection to link my board as it is shown below:
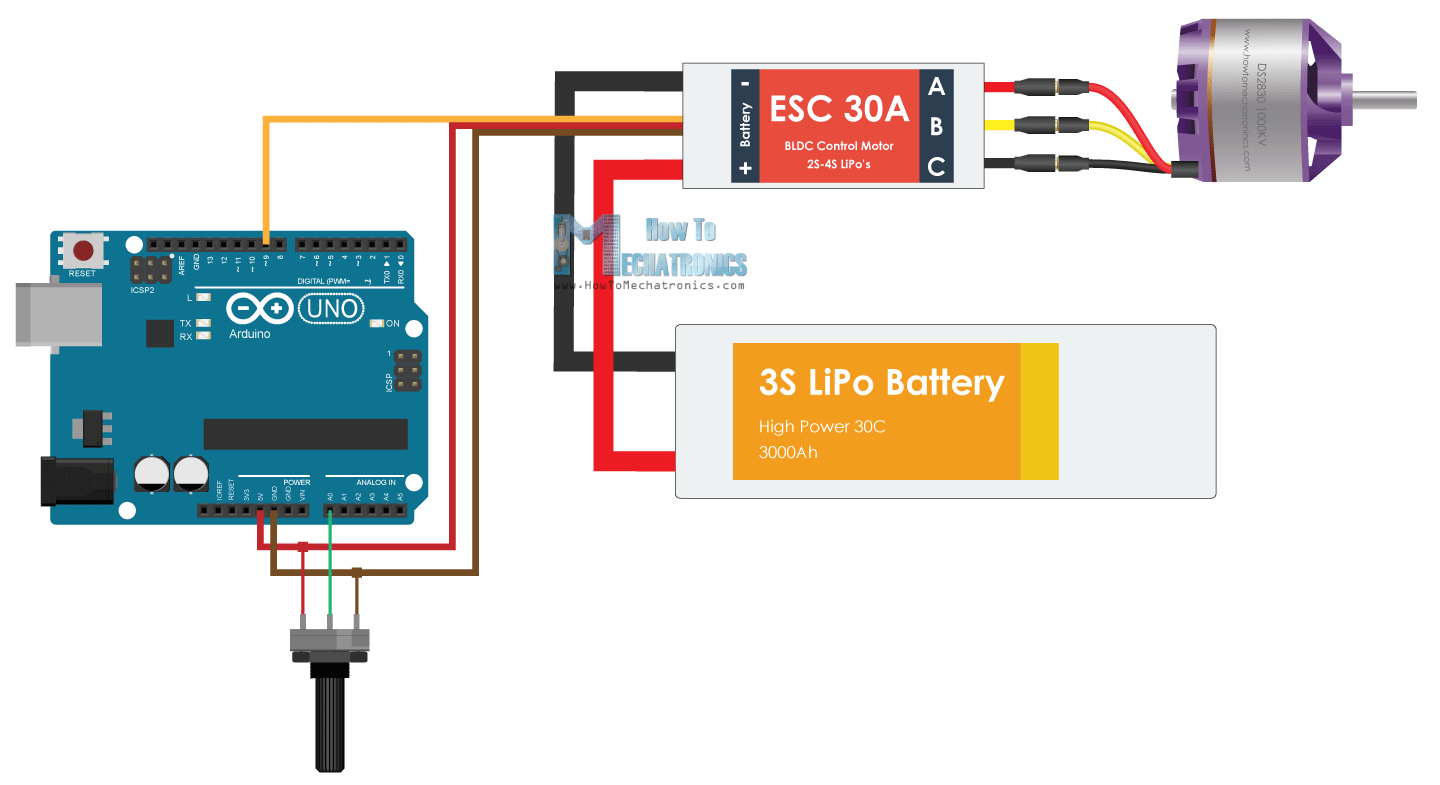
The other parts connections :
Below are the pins out of my ship (Atmega1284p):
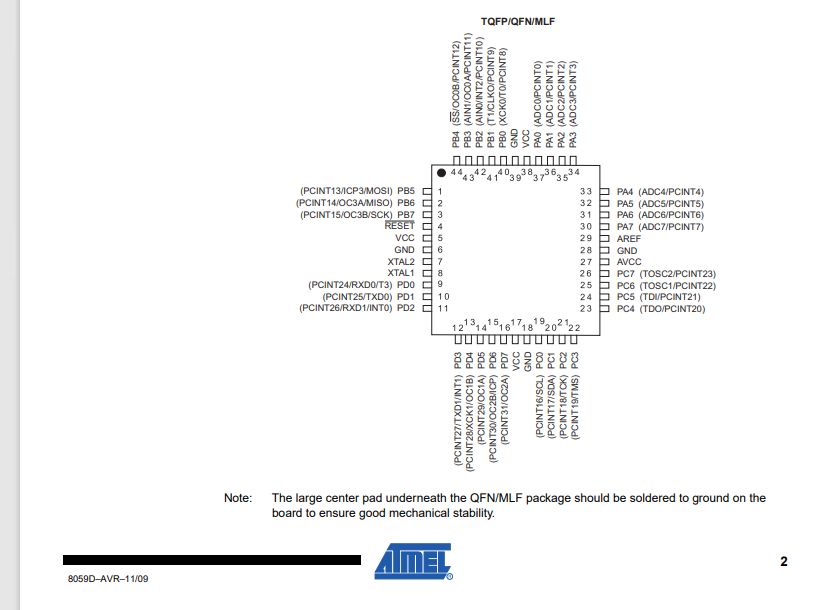
You can also check the ship datasheet from Here.
2- Connections :
ESC 30A with pin 13(PD4) of my board :
VCC with VCC
GND with GND
The brushless two ports :
- VCC with the lipo battery VCC
- GND with the lipo battery GND
After checking the connections I uploaded the code using the FTDI:
This is the right code :
//Parameters
const int escPin = 13;
int min_throttle = 1000;
int max_throttle = 2000;
unsigned long currentMillis, previousMillis;
void setup() {
//Init Serial USB
Serial.begin(9600);
Serial.println(F("Initialize System"));
//Init ESC
pinMode(escPin, OUTPUT);
initProcedure();
}
void loop() {
runBrushless();
}
void runBrushless() { /* function runBrushless */
//// Test Brushless routine
Serial.println("running");
currentMillis = 0;
previousMillis = millis();
while (currentMillis < 2000) {
currentMillis = millis() - previousMillis;
digitalWrite(escPin, HIGH);
delayMicroseconds(1350);
digitalWrite(escPin, LOW);
delay(20);
}
Serial.println("stop");
currentMillis = 0;
previousMillis = millis();
while (currentMillis < 2000) {
currentMillis = millis() - previousMillis;
digitalWrite(escPin, HIGH);
delayMicroseconds(min_throttle);
digitalWrite(escPin, LOW);
delay(20);
}
}
void initProcedure() { /* function initProcedure */
//// ESC inittialisation process
previousMillis = millis();
Serial.println("throttle up");
while (currentMillis < 3000) {
currentMillis = millis() - previousMillis;
Serial.println(currentMillis);
digitalWrite(escPin, HIGH);
delayMicroseconds(max_throttle);
digitalWrite(escPin, LOW);
delay(20);
} //beep- beep-
currentMillis = 0;
previousMillis = millis();
Serial.println("throttle down");
while (currentMillis < 4500) {
currentMillis = millis() - previousMillis;
Serial.println(currentMillis);
digitalWrite(escPin, HIGH);
delayMicroseconds(min_throttle);
digitalWrite(escPin, LOW);
delay(20);
} // beep--
// 1 2 3
}
The work is done :