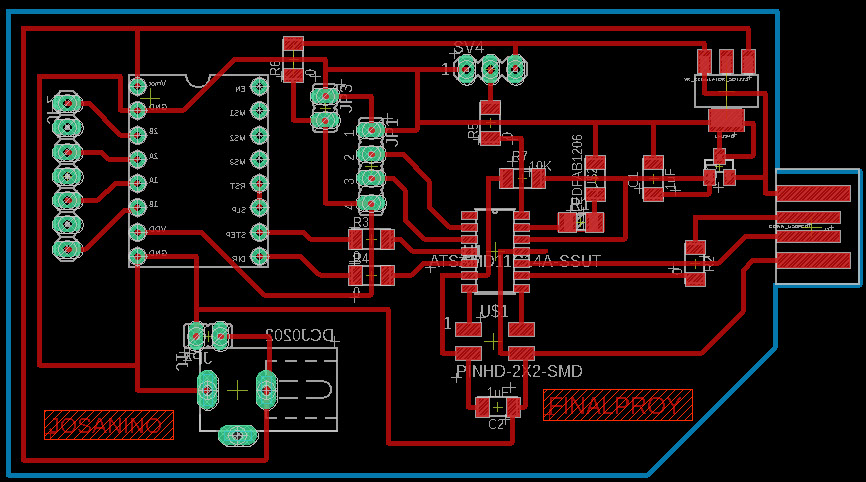
The board was developed for Josanino's Final Project to connect the sensors and the nema stepper motor.

Capacitor 10 uF
Regulador 3.3 -0.1 A
AT SAMD IIC
Programmable header for our card
Header
Capacitor 10 uF
Resistor 0 OHMS
Resistor 10k OHMS
Bridge
-crop-u48279.jpg?crc=193347659)
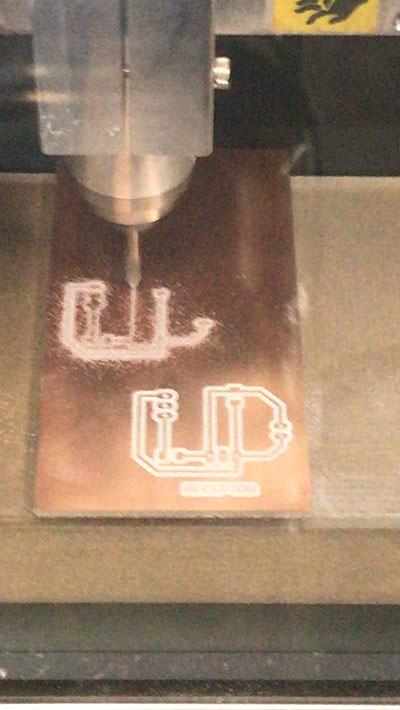
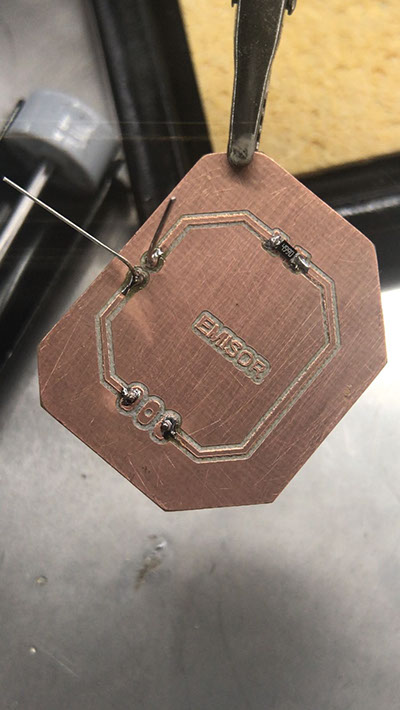
In this assignment I develop the emitter and receiver plates of the phototransistor as well as its programming.
For this work, the Eagle software was used to design the board and the Josanino board was used as a base (see additional information at the end), but several components were added that will be useful for the Final Project. The components that were added were:
- Pololu
- Headers for connecting phototransistor sensor boards
- Resistor 0 OHMS
- DC Jack for power
-crop-u48275.jpg?crc=330067559)


const int dirPin = 15; //direction pin
const int stepPin = 14; //pwm pin
const int ledpin = 2; //led probe
int sensor = 4;
const int EchoPin = 9;
const int TriggerPin = 8;
int stepDelay = 12500; // vel motor
int signalsensor;
void setup() // configuration global
{
Serial.begin(115200);
pinMode(dirPin, OUTPUT); //output direction pin
pinMode(stepPin, OUTPUT); // outpur pwm pin
pinMode(ledpin, OUTPUT); // output led probe
pinMode(TriggerPin, OUTPUT);
pinMode(EchoPin, INPUT);
pinMode(sensor, INPUT); // input signal sensor
}
void loop()
{
digitalWrite(ledpin,HIGH); //turn on led probe
int cm = ping(TriggerPin, EchoPin);
Serial.print("");
Serial.println(cm);
if (cm >30 && cm<50)
{
//digitalWrite(ledpin,LOW);
digitalWrite(dirPin, LOW); //direction mot (HIGH spin left and LOW spin right)
digitalWrite(stepPin, HIGH); //four lines generate pwm
delayMicroseconds(stepDelay);
digitalWrite(stepPin, LOW);
delayMicroseconds(stepDelay);
signalsensor = digitalRead(sensor);
if (signalsensor = 1)
{
digitalWrite(ledpin,HIGH);
delay(1000);
digitalWrite(ledpin,LOW);
delay(1000);
digitalWrite(ledpin,HIGH);
delay(1000);
digitalWrite(ledpin,LOW);
}
}
}
int ping(int TriggerPin, int EchoPin)
{
long duration, distanceCm;
digitalWrite(TriggerPin, LOW); //to generate a clean pulse we set LOW 4us
delayMicroseconds(4);
digitalWrite(TriggerPin, HIGH); //we generate Trigger (trigger) of 10us
delayMicroseconds(10);
digitalWrite(TriggerPin, LOW);
duration = pulseIn(EchoPin, HIGH); //we measure the time between pulses, in microseconds
distanceCm = duration * 10 / 292/ 2; //we convert distance, in cm
return distanceCm;
}

Final PCB project was developed in output device
Phototransistor sensor emitter and receiver boards developed in this assignment whose function will be to stop the motor when the ball falls for the final project







