Group project
Fab Lab Raykjavík,
Arnar Daði,
Jón Þór,
Svanur og Karítas
We meet on Thursday to brainstorm and start our project, it was fun and whent well as yu can see on our webpage
Handy McHandface .
After brainstorming we splitt cores and Arnar Dadi and me took care of trying to get the motor turning.
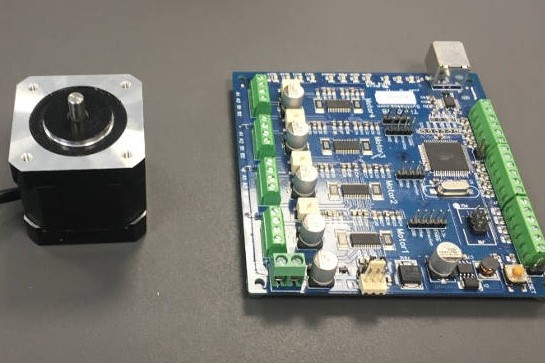

We are using a stepper motor and a TinyG v8 controller board. We used the website Synthetos.com to find information on how to connect it together.
There we found a link to a site that pointed us to a download of some motor controller software. We were able to follow the instructions step by step.
Next we established the wiring layout and connected the stepper motor to the controller board. This worked on the first attempt, and we discovered that f=feeds and x=position.
Now we have to see how our gears work to be able to determine the f and x values to give us a 180 degree movement.
Now we put the demo together to see how it works.
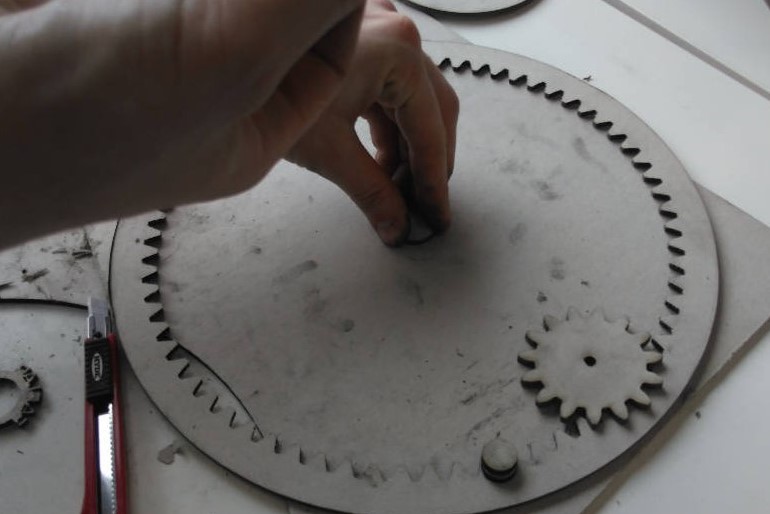
It does work, but we want to make some adjustments; - The motor shaft is too long so we want to lift the large gear and double it's thickness.
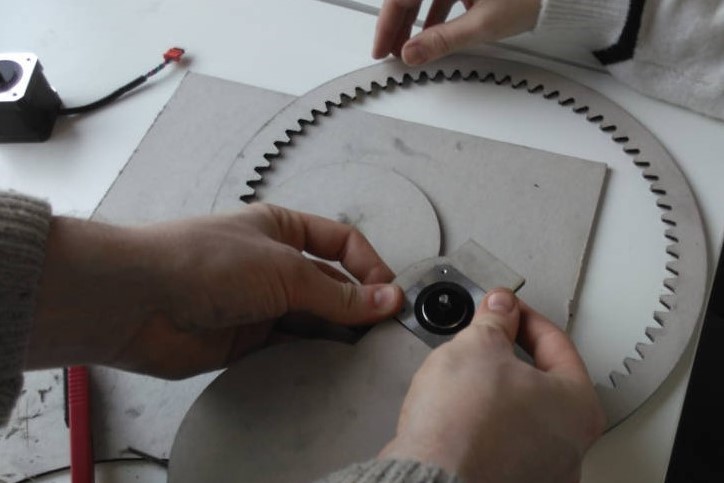
- We also want to double the thickness of the motor support arm to ensure good stiffness and stability. - We want to make a top cover where the arm will be placed,
it will be resting on the middle of the machine and not on top of the motor.
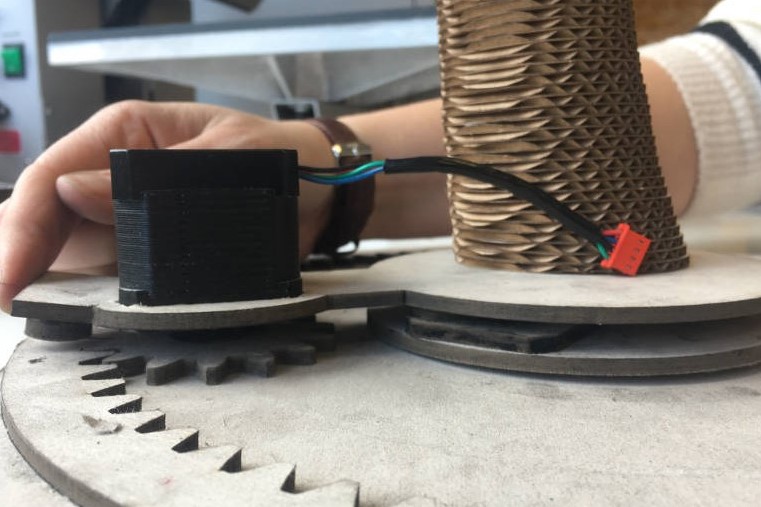
So cardboard is not good for testing because it will wear down quickly, but we did also make an on/off button and for that we needed to solder a wire to the button.
We also need to connect the controller board to a PC/Raspberry pi or some such.
We dropped the original idea and decided to connect directly to a computer, but made a change to restricting the waving motion to 180 degrees and back,
so the wires will not get twisted.
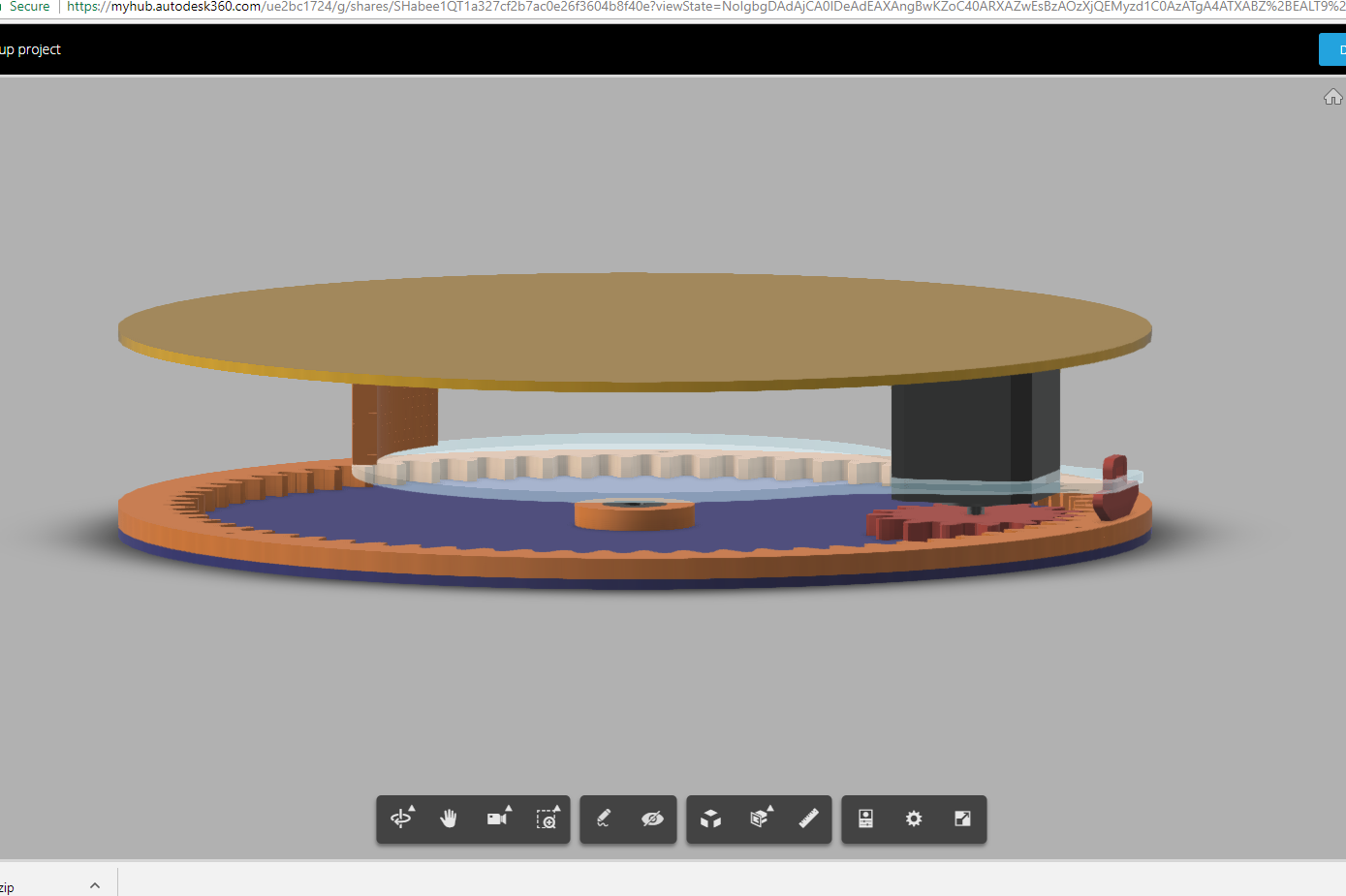
We remade the frame, this time from laser cut acrylic, Jon prepared the Fusion 360 design for cutting using Illustrator and Svanur cut the acrylic on the Epilog.

This worked very well and we glued together the parts that needed gluing and connected the motor. It was a success.
The code for the TinyG is very simple, one has to begin by zeroing, which is: G0 x0. We will make the gear go to the position G1 f-1800 x95, whic is approx.
180 degrees, but the finger flexes at G1 f200 y-50 and straightens at G1 f200 y50.
After two days of work I went home and came back week later... to be continued week 16