INPUT
Now its time to my final project.
LESSON >> web




Now its time to my final project.
LESSON >> web
>>> THE IDEA
This project is focused on showing children the power and magic of digital fabrication.
It was a dream of my nephew Gaston, he has only 4 years old and some day he said me: “Tio Geny (uncle Geny) what about if we build a spaceship or a car?”. Now, his dream comes true!
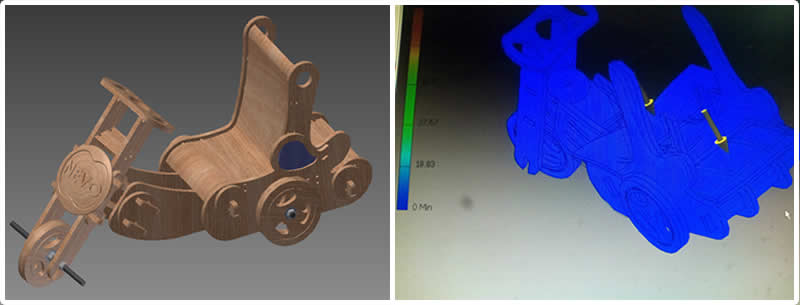
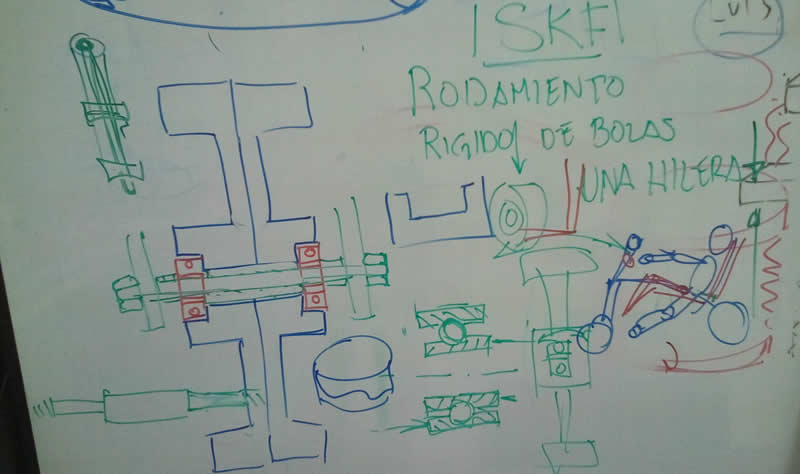
>>> DESIGNING
I used this sketch of my friend Toshiro Tabuchi who helped me to think how to build my wheels.
 To make my 3d model I used Inventor. Please review my Assignment 02 to know more about why I used Inventor.
To make my 3d model I used Inventor. Please review my Assignment 02 to know more about why I used Inventor.
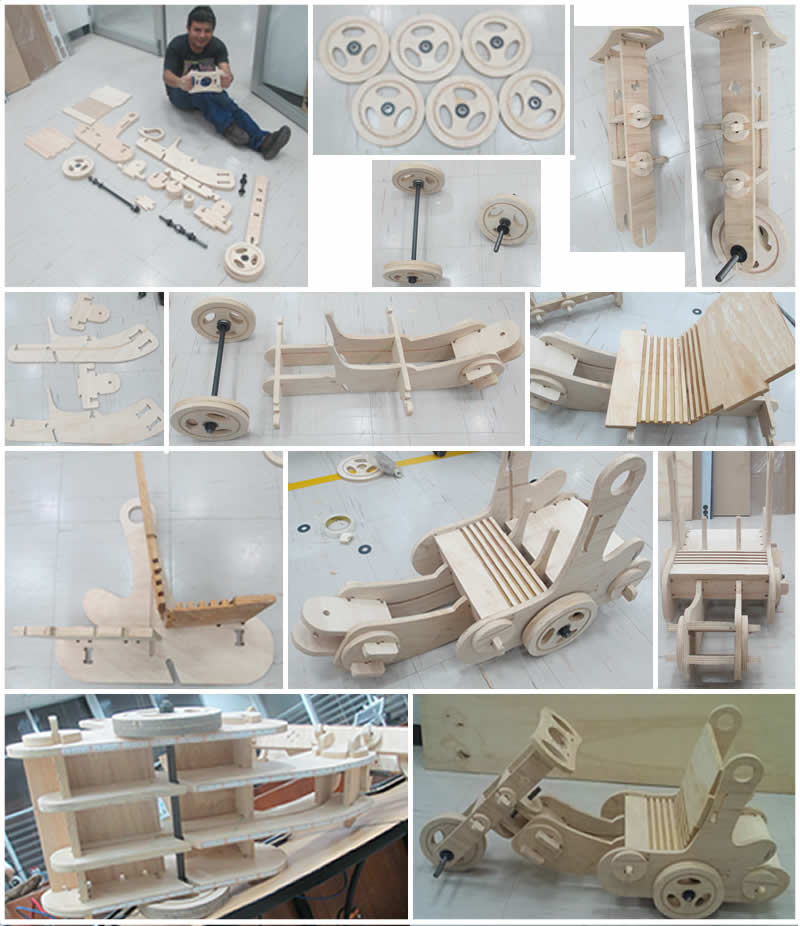
>>> MANUFACTURING
I used SHOPBOT to go from bits world to reald world.
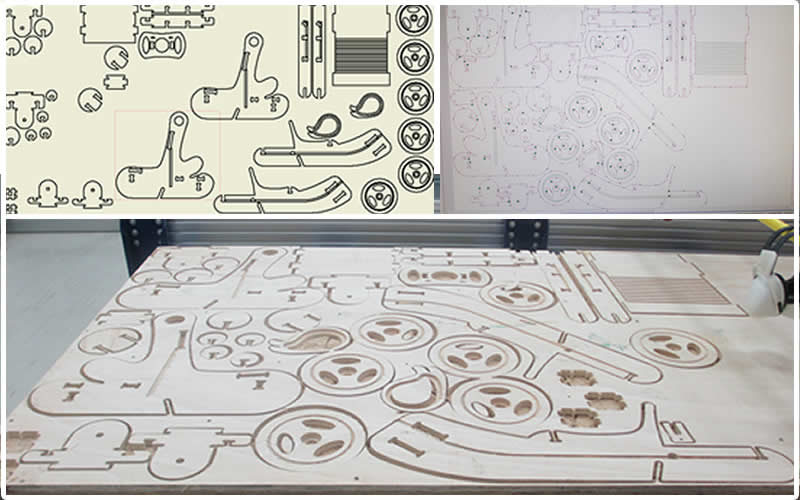 Step by step:
Step by step:
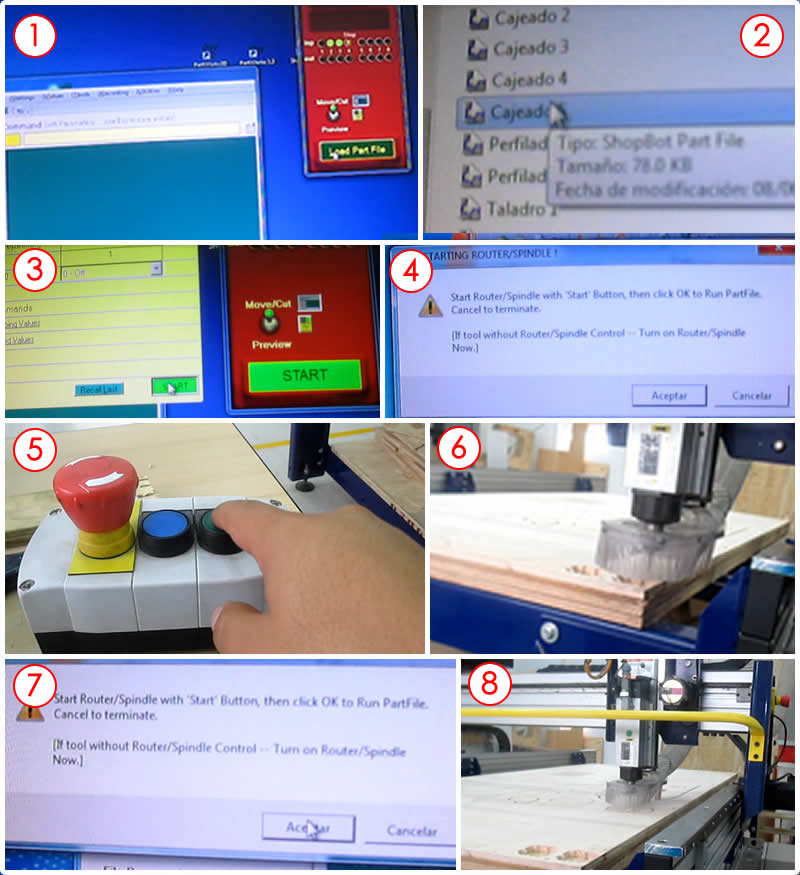 Here a little short of manufacturing process:
Here a little short of manufacturing process:
>>> ASSEMBLING
I designed this fantastic car to use joints instead screws and do more easy the assembly.
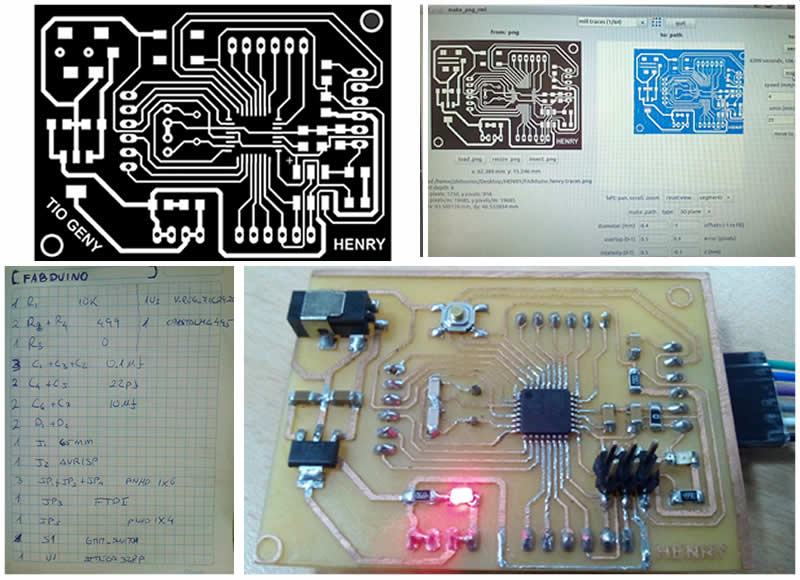
 >>> ELECTRONICS
>>> ELECTRONICS
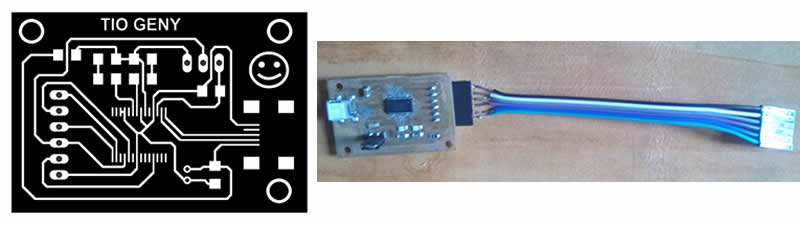
using the knowledge acquired in my works Electronic Production and Embedded Programming I made my own FABDUINO and FTDI.
FABDUINO
 FTDI
FTDI
 >>> REFINING
>>> REFINING
To create a good look I used the knowledge acquaried in my work COMPUTER CONTROLLED CUTTING and made my shileds in clear acrylic.
Here a little short of cutting process:
>>> PROGRAMING
I used an ultrasonic sensor to detect one person or thing at one meter and turn on my leds.
 This is my program:
This is my program:
long distancia;
long tiempo;
void setup(){
Serial.begin(9600);
pinMode(9, OUTPUT); /*activación del pin 9 como salida: para el pulso ultrasónico*/
pinMode(8, INPUT); /*activación del pin 8 como entrada: tiempo del rebote del ultrasonido*/
pinMode(13, OUTPUT);//Definimos el led 13 como salida
}
void loop(){
digitalWrite(9,LOW); /* Por cuestión de estabilización del sensor*/
delayMicroseconds(5);
digitalWrite(9, HIGH); /* envío del pulso ultrasónico*/
delayMicroseconds(10);
tiempo=pulseIn(8, HIGH); /* Función para medir la longitud del pulso entrante. Mide el tiempo que transcurrido entre el envío
del pulso ultrasónico y cuando el sensor recibe el rebote, es decir: desde que el pin 12 empieza a recibir el rebote, HIGH, hasta que
deja de hacerlo, LOW, la longitud del pulso entrante*/
distancia= int(0.017*tiempo); /*fórmula para calcular la distancia obteniendo un valor entero*/
/*Monitorización en centímetros por el monitor serial*/
/*Serial.println("Distancia ");
Serial.println(distancia);
Serial.println(" cm");*/
if (distancia<=100){
digitalWrite(13, HIGH);
delay(distancia);
digitalWrite(13, LOW);
delay(distancia);
}
else{
digitalWrite(13, LOW);
}
}
>>> TESTING THE PROGRAM
When and object is near that one meter led turn on and turn of more quickly.
Here a little short:
>>> THE FANTASTIC CAR IS READY
Now Gastoncito and his friends will be happy like me.
YOU WILL SEE THE EVOLUTION OF THE FANTASTIC CAR HERE
FILES >>
Here are the files that I created if you wish to study or replicate this assignment:
Aseembly in Inventor - Sheet in DXF - Sheet in DWG
Shields in Corel Draw