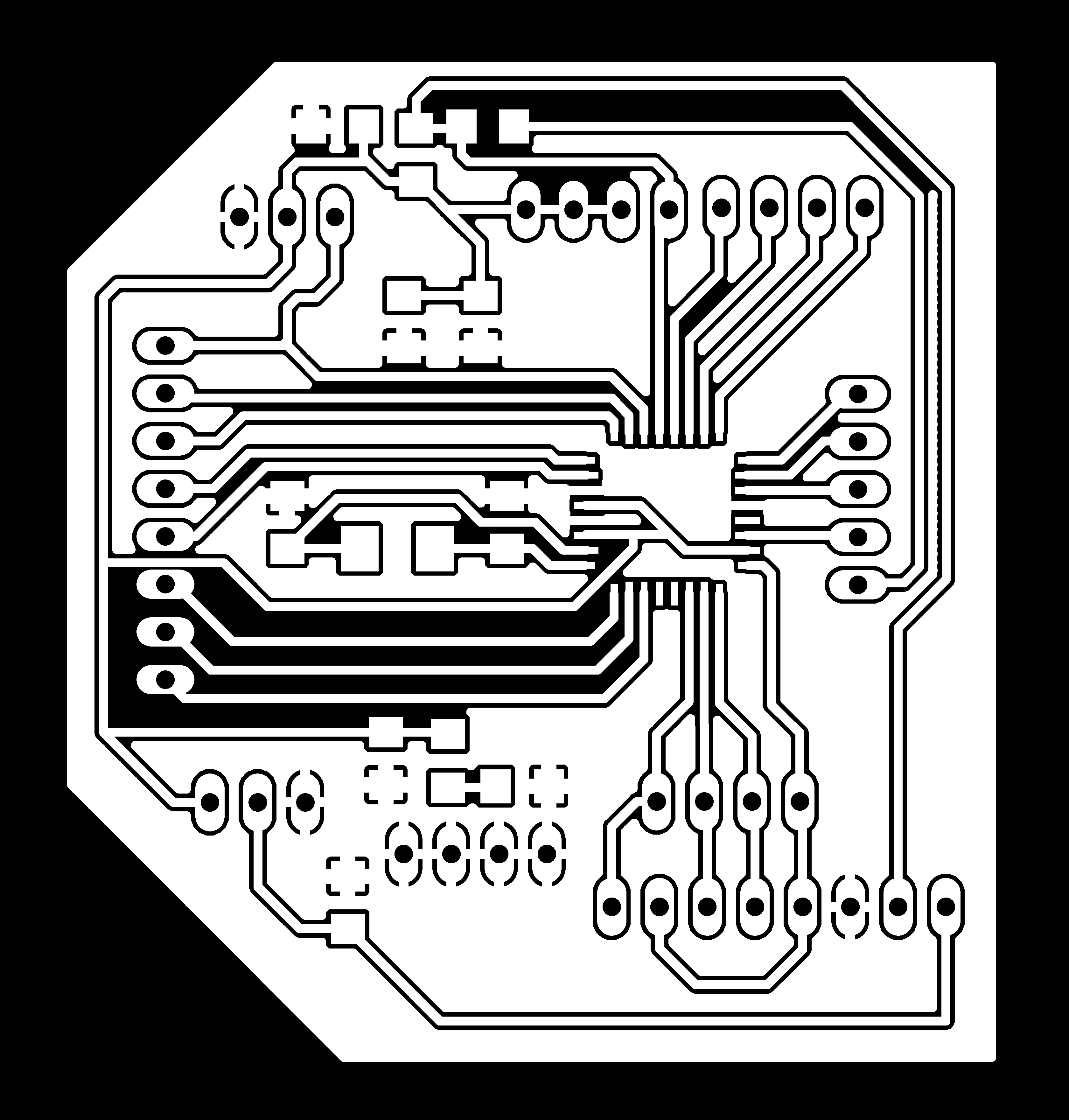
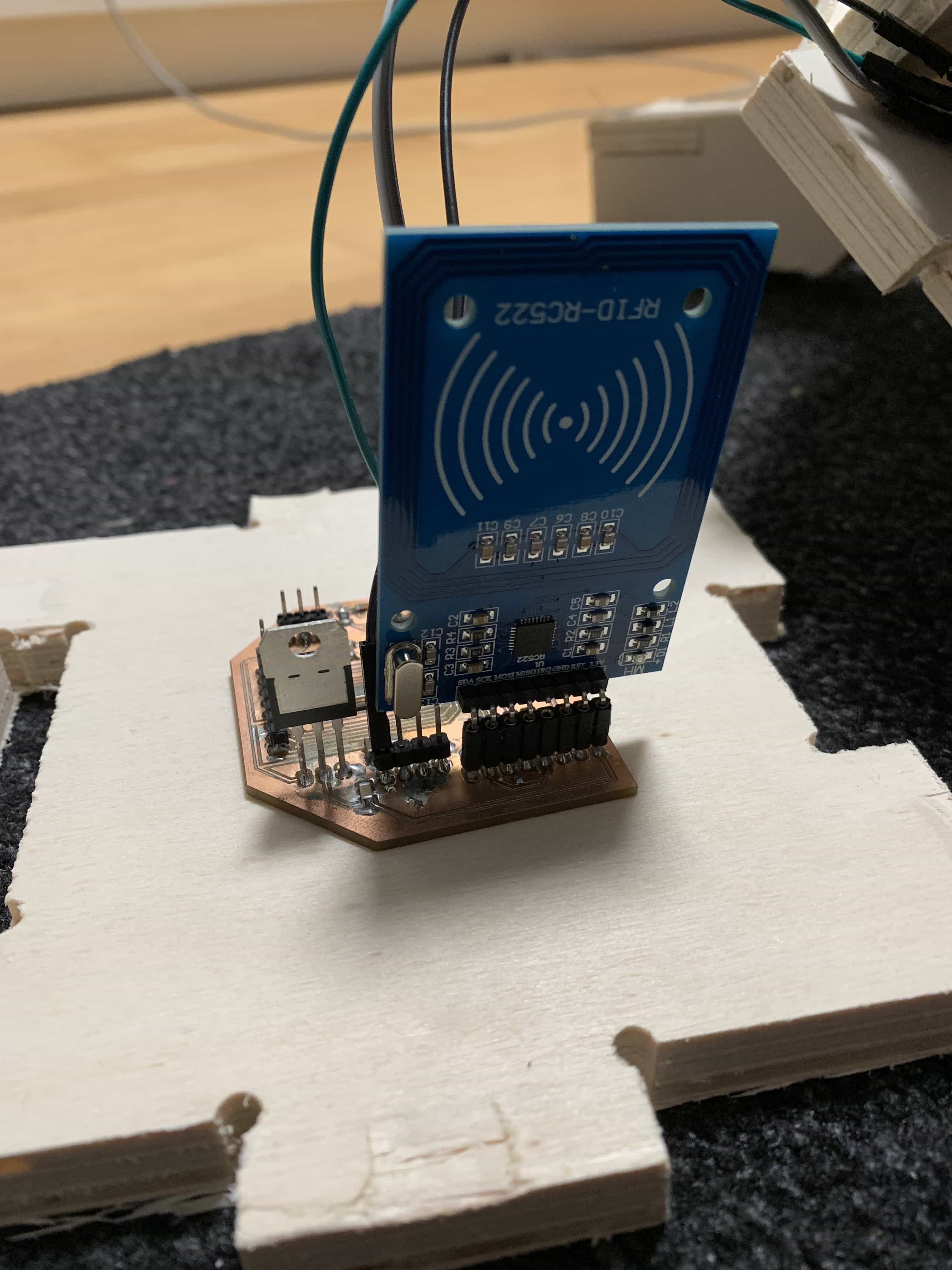
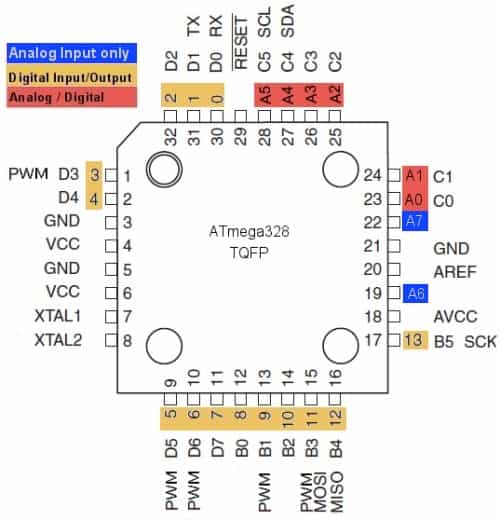
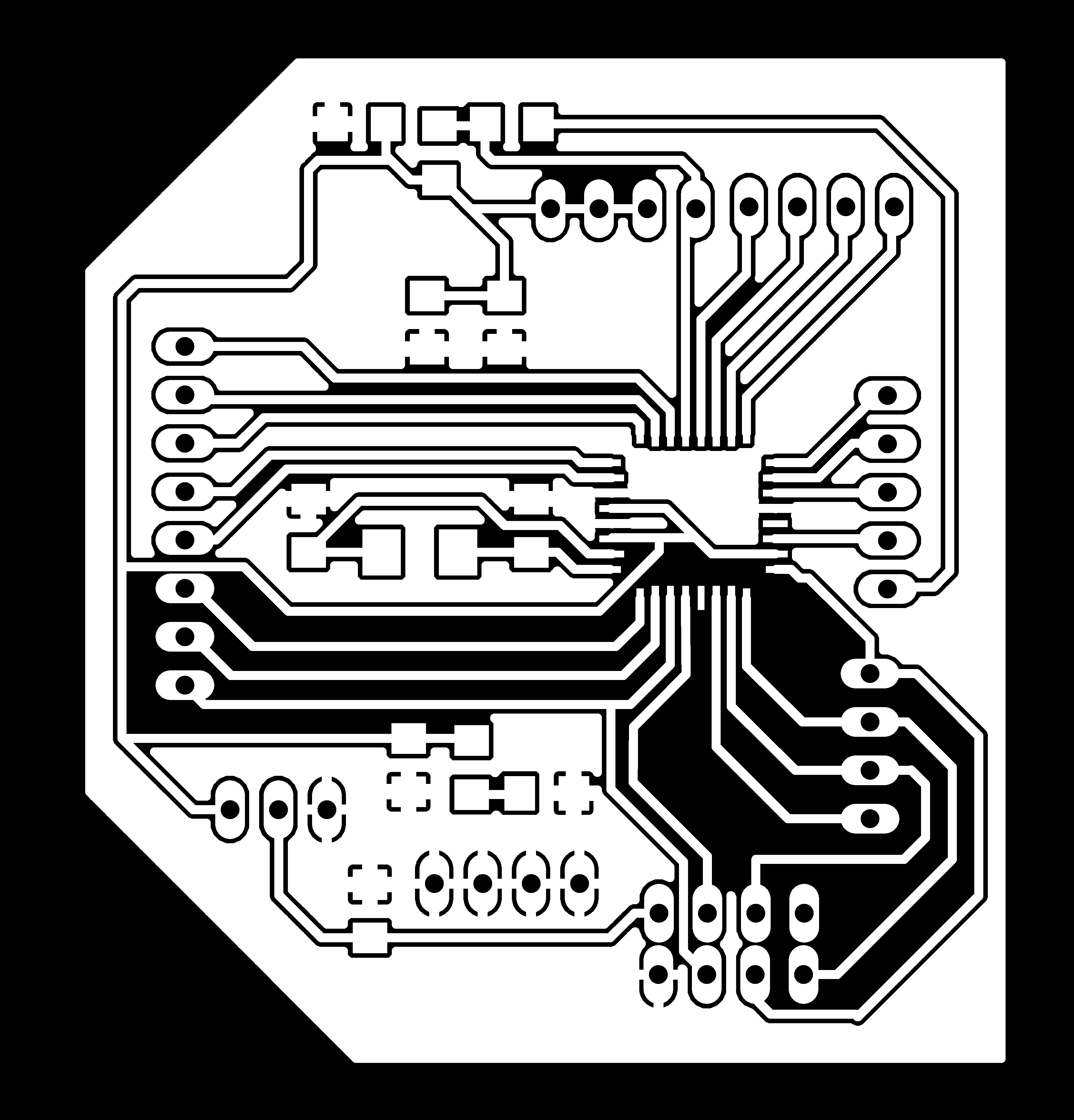
In order of my final project which is a elecric gokart I wanted to use an rfid scanner to authenticate myself, so I could use it for my final project afterwards. I've made a board design using the atmega328p chipset, to attach my rfid scanner to.
My code is a simple authentication using the id of rfid chips and storing them into arrays, to authenticate I compare the scanned tag with the id of the master key.
#include >SPI.h≷
#include >MFRC522.h≷
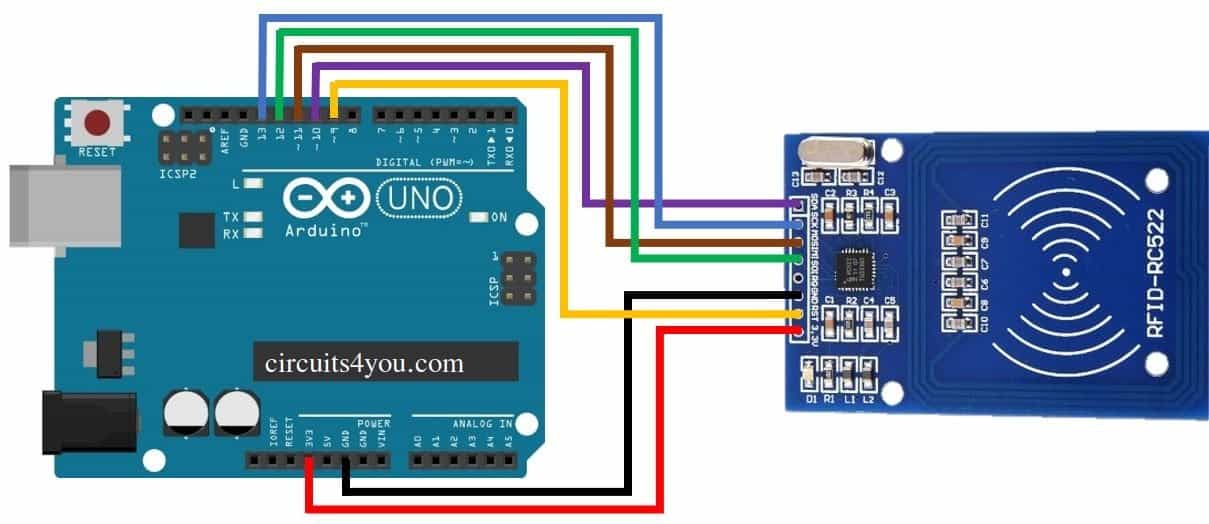
constexpr uint8_t RST_PIN = 9; // Configurable, see typical pin layout above
constexpr uint8_t SS_PIN = 10; // Configurable, see typical pin layout above
MFRC522 rfid(SS_PIN, RST_PIN); // Instance of the class
MFRC522::MIFARE_Key key;
// Init array that will store new NUID
byte nuidPICC[4];
void setup() {
Serial.begin(115200);
SPI.begin(); // Init SPI bus
rfid.PCD_Init(); // Init MFRC522
for (byte i = 0; i < 6; i++) {
key.keyByte[i] = 0xFF;
}
}
void loop() {
// Look for new cards
if ( ! rfid.PICC_IsNewCardPresent())
return;
// Verify if the NUID has been readed
if ( ! rfid.PICC_ReadCardSerial())
return;
// Serial.print(F("PICC type: "));
MFRC522::PICC_Type piccType = rfid.PICC_GetType(rfid.uid.sak);
//Serial.println(rfid.PICC_GetTypeName(piccType));
// Check is the PICC of Classic MIFARE type
if (piccType != MFRC522::PICC_TYPE_MIFARE_MINI &&
piccType != MFRC522::PICC_TYPE_MIFARE_1K &&
piccType != MFRC522::PICC_TYPE_MIFARE_4K) {
//Serial.println(F("Your tag is not of type MIFARE Classic."));
return;
}
//Check if the scanned tag has the same NUID by comparing the array with the actual numbers
if (rfid.uid.uidByte[0] == 201 &&
rfid.uid.uidByte[1] == 211 &&
rfid.uid.uidByte[2] == 124 &&
rfid.uid.uidByte[3] == 91 ) {
//print hello message
Serial.println(F("Hello Master!"));
// Store NUID into nuidPICC array
for (byte i = 0; i < 4; i++) {
nuidPICC[i] = rfid.uid.uidByte[i];
}
}
//Check if the scanned tag has the same NUID by comparing the array with the actual numbers
else if (rfid.uid.uidByte[0] == 36 &&
rfid.uid.uidByte[1] == 159 &&
rfid.uid.uidByte[2] == 223 &&
rfid.uid.uidByte[3] == 43 ) {
//Print hello message
Serial.println(F("Hello Mr.Rustamov!"));
// Store NUID into nuidPICC array
for (byte i = 0; i < 4; i++) {
nuidPICC[i] = rfid.uid.uidByte[i];
}
}
//Check if scanned tag has a difference to the master tags
else if (rfid.uid.uidByte[0] != 201 ||
rfid.uid.uidByte[0] != 36 ||
rfid.uid.uidByte[1] != 211 ||
rfid.uid.uidByte[1] != 159 ||
rfid.uid.uidByte[2] != 124 ||
rfid.uid.uidByte[2] != 223 ||
rfid.uid.uidByte[3] != 91 ||
rfid.uid.uidByte[3] != 43
) {
// Store NUID into nuidPICC array
for (byte i = 0; i < 4; i++) {
nuidPICC[i] = rfid.uid.uidByte[i];
}
//Giving an error message because the tag is not a master tag
Serial.println(F("Invalid Card!"));
}
//Scanning a new tag
if (rfid.uid.uidByte[0] != nuidPICC[0] ||
rfid.uid.uidByte[1] != nuidPICC[1] ||
rfid.uid.uidByte[2] != nuidPICC[2] ||
rfid.uid.uidByte[3] != nuidPICC[3] ) {
// Store NUID into nuidPICC array
for (byte i = 0; i < 4; i++) {
nuidPICC[i] = rfid.uid.uidByte[i];
}
}
// Halt PICC
rfid.PICC_HaltA();
// Stop encryption on PCD
rfid.PCD_StopCrypto1();
}
/**
* Helper routine to dump a byte array as hex values to Serial.
*/
void printHex(byte *buffer, byte bufferSize) {
for (byte i = 0; i < bufferSize; i++) {
Serial.print(buffer[i] < 0x10 ? " 0" : " ");
Serial.print(buffer[i], HEX);
}
}
/**
* Helper routine to dump a byte array as dec values to Serial.
*/
void printDec(byte *buffer, byte bufferSize) {
for (byte i = 0; i < bufferSize; i++) {
Serial.print(buffer[i] < 0x10 ? " 0" : " ");
Serial.print(buffer[i], DEC);
}
}
My code is based on the tutorial of Circuits4You.
For visualizing purposes I will show you my phyton interface which I made for the Interface and application programming week.
In addition to that I have designed another board based on the atmega 328p chipset. I wanted to build a electric longboard which I will accelerate using a pressure sensor.
If you would like to have an introduction to electronics design/production check my electronics design and my electronics production assignment.

to attach the pressure sensor, I have followed this schematik. It is important that you use a 10k ohm resistor between the analog pin and ground to protect the sensor from overvoltage.
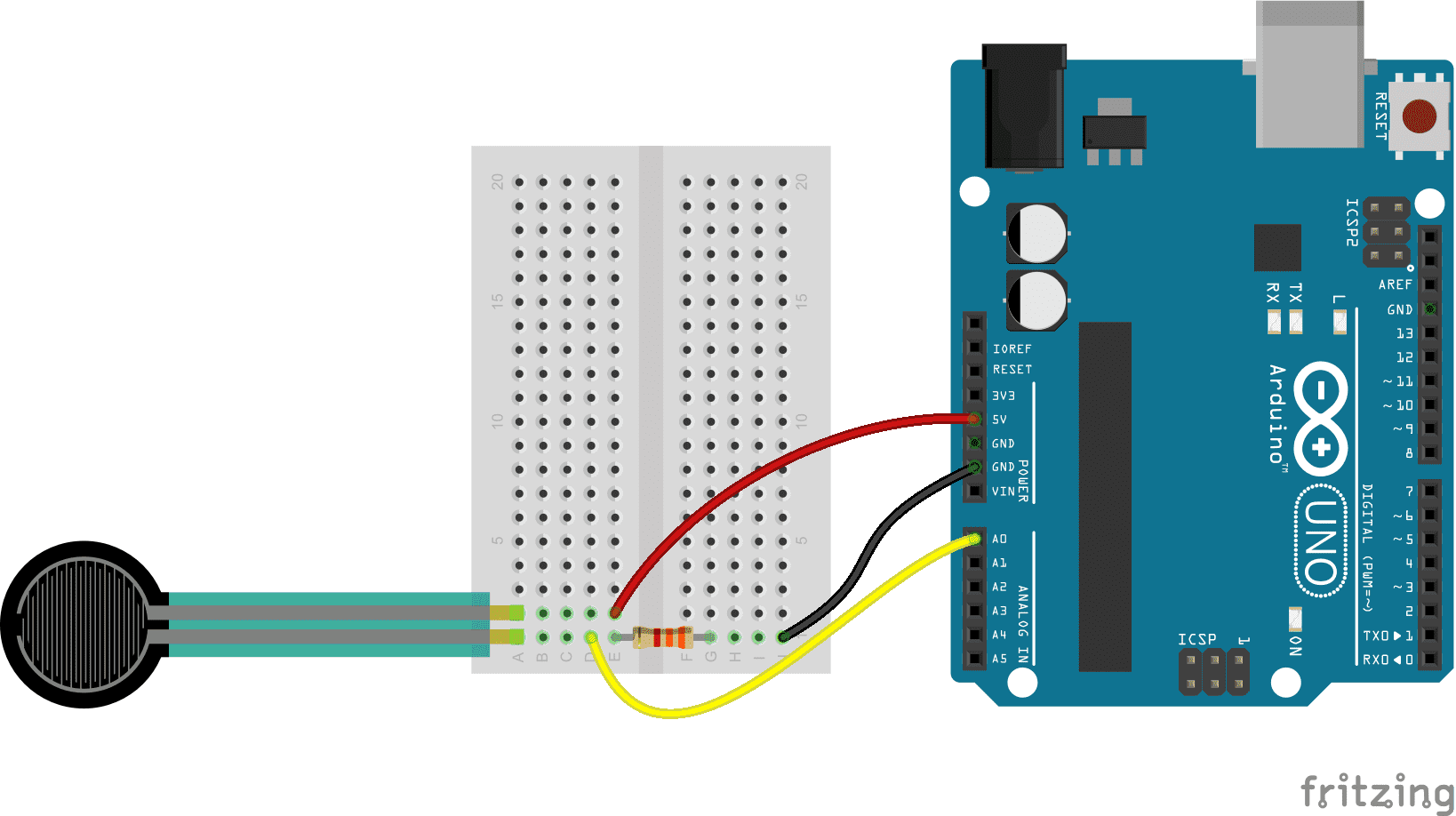
The pressure sensor returns an analog signal which I can use to control an brushless motor. I wrote a small code to do that.
const int motor = 11; //defining motor pin
const int pressurePin = A0; //defining pressure sensor pin(has to be analog pin)
int value = 0; //creating value for the sensor
int mappedValue = 0;
void setup() {
pinMode(motor,OUTPUT); //setting the motorpin as an output pin
Serial.begin(9600);
}
void loop() {
value = analogRead(pressurePin); //giving value the output of the analog sensor
mappedValue = map(value, 0, 800, 100, 254);
//Serial.println(value);
Serial.println(mappedValue);
analogWrite(motor, mappedValue);//give motorcontroller the value of the sensor
}
In the following video you can see a quick demonstration of the brushless motor working using the pressure sensor