what tasks have been completed
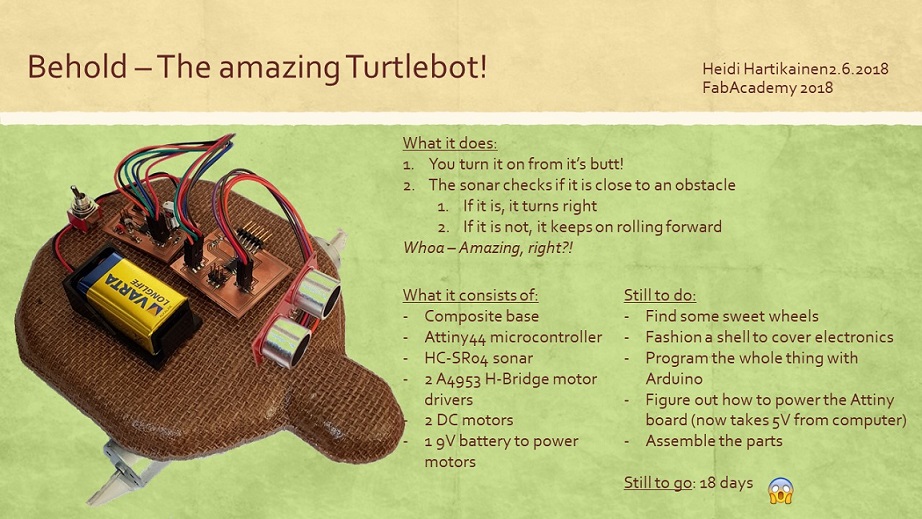
- I built the composite base for the robot on Wildcard week
- I built and tested the main project PCB with the sonar on Input week
- I built and tested the PCB with two H-Bridges and two motors on Output week.
The H-bridge board took a lot of troubleshooting but other than that, all has worked just fine.
What tasks remain
1. I need to program the sonar and the H-bridges to work together.
--> I will use Arduino codes identified on week 18 as a starting point
2. I need to attach the PCB's, the sonar, the motors, and the battery case to the base of the turtle neatly.
--> I have found some ready 3D printable parts also on week 18 that I am planning to use to attach the sonar and possibly the motors
3. I need to design and lasercut a shell for the turtle to cover electronics
--> I am thinking fusion360 + slicer.
4. I need to find suitable wheels and a way to connect them to the motors.
--> I am thinking about using ready wheels scoured from scrapped robots at FabLab
5. I need to complete final project documentation before the 20th...
6. And prepare a slide and video to illustrate my project
My final presentation is on june 20th. That thought does give me some panicky feelings already as I am currently swamped at work and need to prioritize that. I will work through the next weekend to finalize my work stuff faster --> but even doing that, I have max 7 full days to complete the final project.

I need to find a way to do some really fast prototyping, not thinking necessarily too much of the form, but focus on the function. What I am thinking:
- One day for fusio360 + lasercutting the shell of the turtle
- One day for 3D printing sonar and motor mounts (and attaching sonar and motors to base)
--> While printing, I should be able to work on the programming part.
- Three days for assembly and trying to get everything to work together
- One day for the video and slide
- One day for final project documentation.
Optimistic perhaps...
Questions that need to be resolved
- Is it OK to use readily 3D printable mounts for sonar and motors I found on thingiverse?
- Is it OK to use some ready wheels for the robot (i was thinkig of scouring the junk robots at fablab for parts)
- Is it possible to use the 9V battery I have there to power my Attiny board (in addition to the motors it is connected to now)?
--> It would be handy if I did not have to walk beside the robot with my laptop attached with an ftdi cable to make it work.
And what happens if I do not make it in time?
Lessons learned
I have learned a lot during my whole time in the FabAcademy. I think I find the most valuable the lessons I have learned about electronics production and design. That has really lifted a shroud of mystery from before my eyes. I also highly value my new skills in Fusion360. Granted that they are still quite immature, I do now know the basics and can build on that in the future. I have also learned the importance of good documentation, and that not everything needs to work just perfect to teach you valuable lessons.
I love the fact that now I feel comfortable just popping into our university's Fablab. Even if there is a sign outside to welcome everyone in, to me the place used to feel a little intimitading. I had no idea how to use any of the machines and processes, and felt overwhelmed by it all. I think that going through the FabAcademy really made me feel like a part of the maker community, and even after FabAcademy I can continue to use the facilities and also encourage others to do so as well.
Copyright © Heidi Hartikainen 2018
Template copyright ©Blackrock Digital LLC 2013-2018

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.