Task:
GROUP assignment
- actuate and automate your machine
- document the group project and your individual contribution
You find the COMPLETE DOCUMENTATION of the Scara-Draw-Bot at our Group-Site
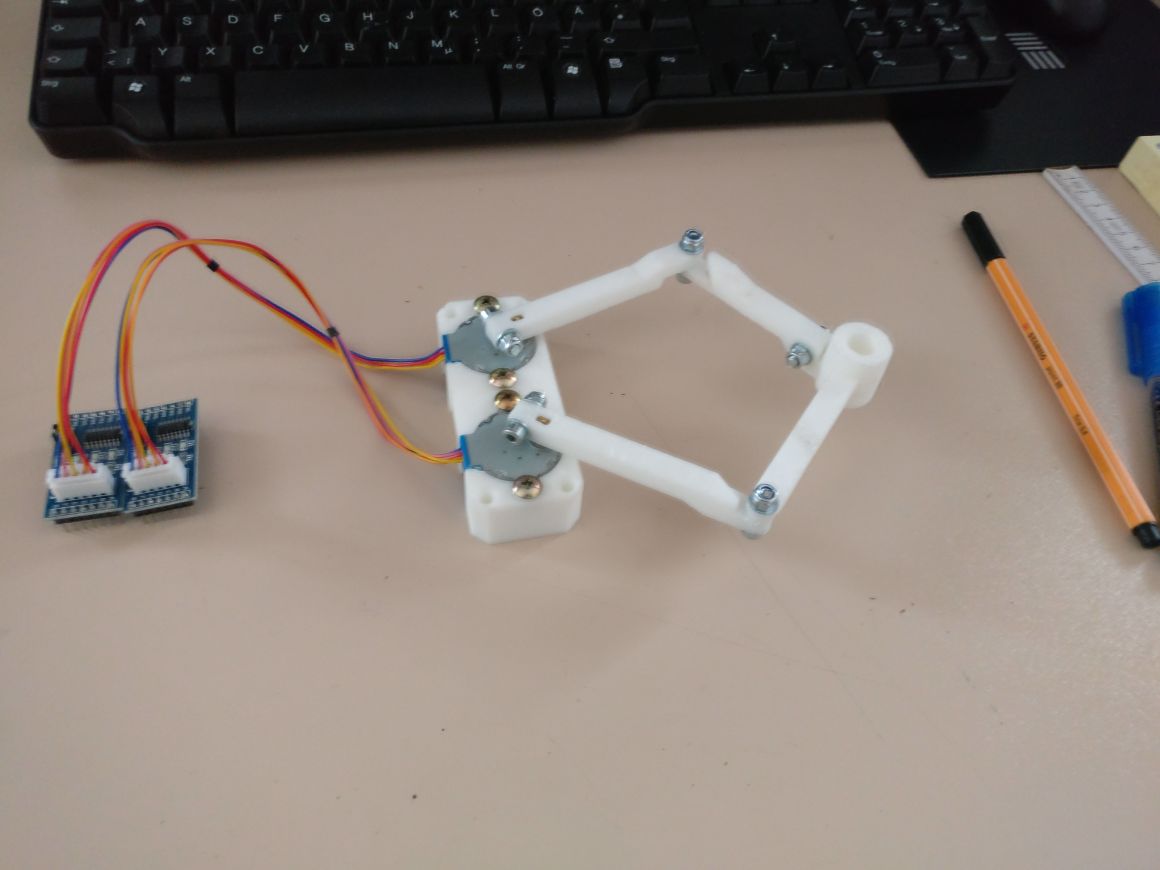
Scara-Draw-Bot: Characteristics
- It moves simultaneously to the mouse or tracks the input of the touchpad.
- The Scara-Draw-Bot has big stepper motors and is scalable
- Drawing Area: paper size A4 or bigger
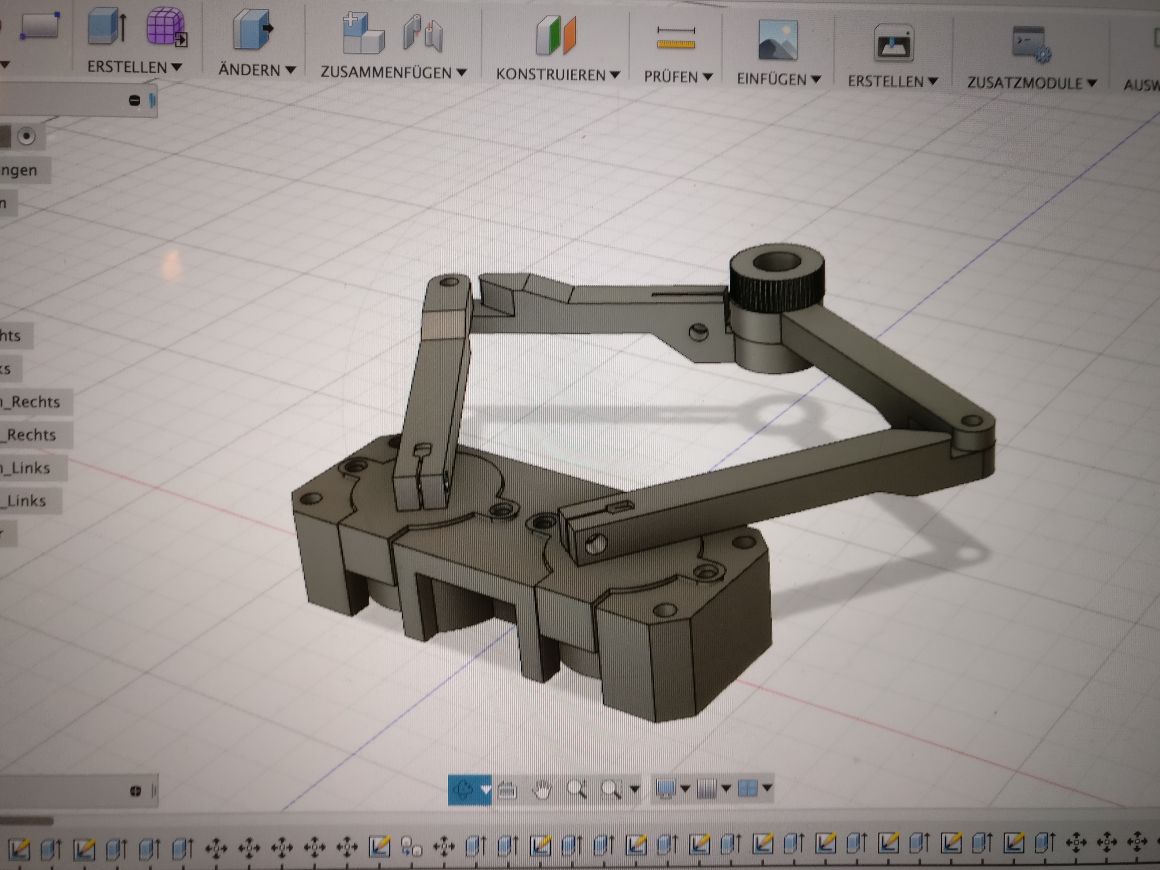
- Makerbeam frame and 3D printed parts
- Machine Size
- Custom code to control the stepper motors
.
 Concept
ConceptDESIGNING A MACHINE: SCARA-DRAW-BOT
For the two-week project we want to design and build a drawing machine.
There are many ways to build a drawing robot, for example a XY Plotter using beams and belts to control the motion of the machine in 2D axis.
We wanted to do something different and decided to build a double-arm Scara Robot, we called it: Scara-Draw-Bot.
Thank you Peter von der Bey for the input and the first 3D models!
.
 Concept
ConceptWHAT IS A SCARA ROBOT?
SCARA: Selective Compliance Assembly Robot Arm
The robot was developed in 1981 in Japan. Attributes: Its arm is rigid in the Z-axis and pliable in the XY- axes.
The arm is similar to human arms and has “articulations”, which permit extending and folding up depending on the task, for example transferring or loading parts.
SCARA Robots are usually faster and require a smaller footprint than a Cartesian Robot. They are often used in Pick-and-Place-Stations.
You find more information and animations here:
A reference of a dual-arm SCARA Robot:
 SCARA Robot (Wikipedia)
SCARA Robot (Wikipedia)MakerBeam
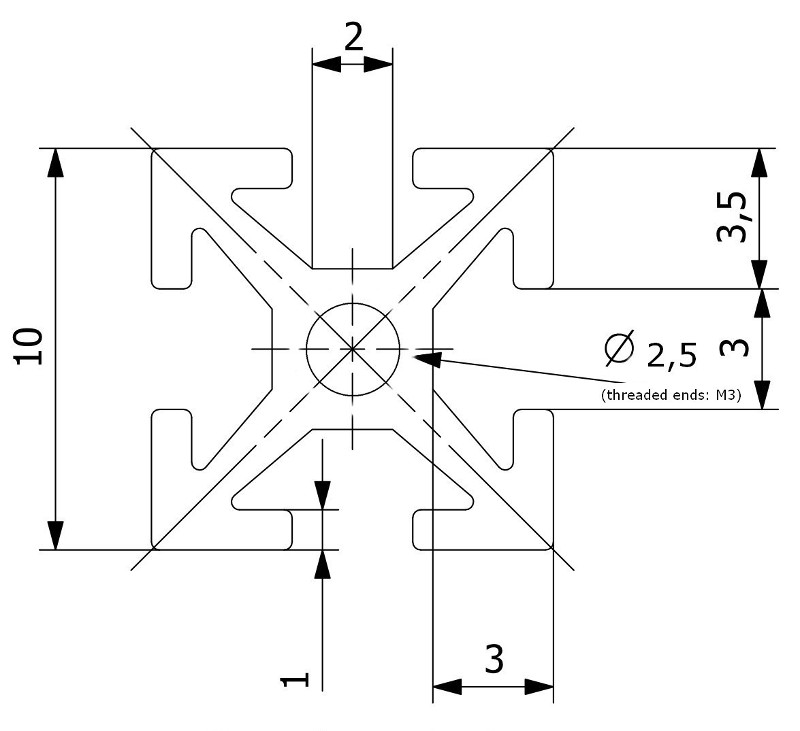
MakerBeam is a 10x10mm aluminum profile. The profiles are very stable and suitable for projects on desks. In the Fab Lab we have a toolkit with profiles, stainless steel brackets (joint plates) in several angels, linear bearings nuts and bolts. It’s also an advantage, that you can order parts separately depending on what you need for your project.
 MakerBeam
MakerBeam