Week 21
Final Project Documentation
Workflow
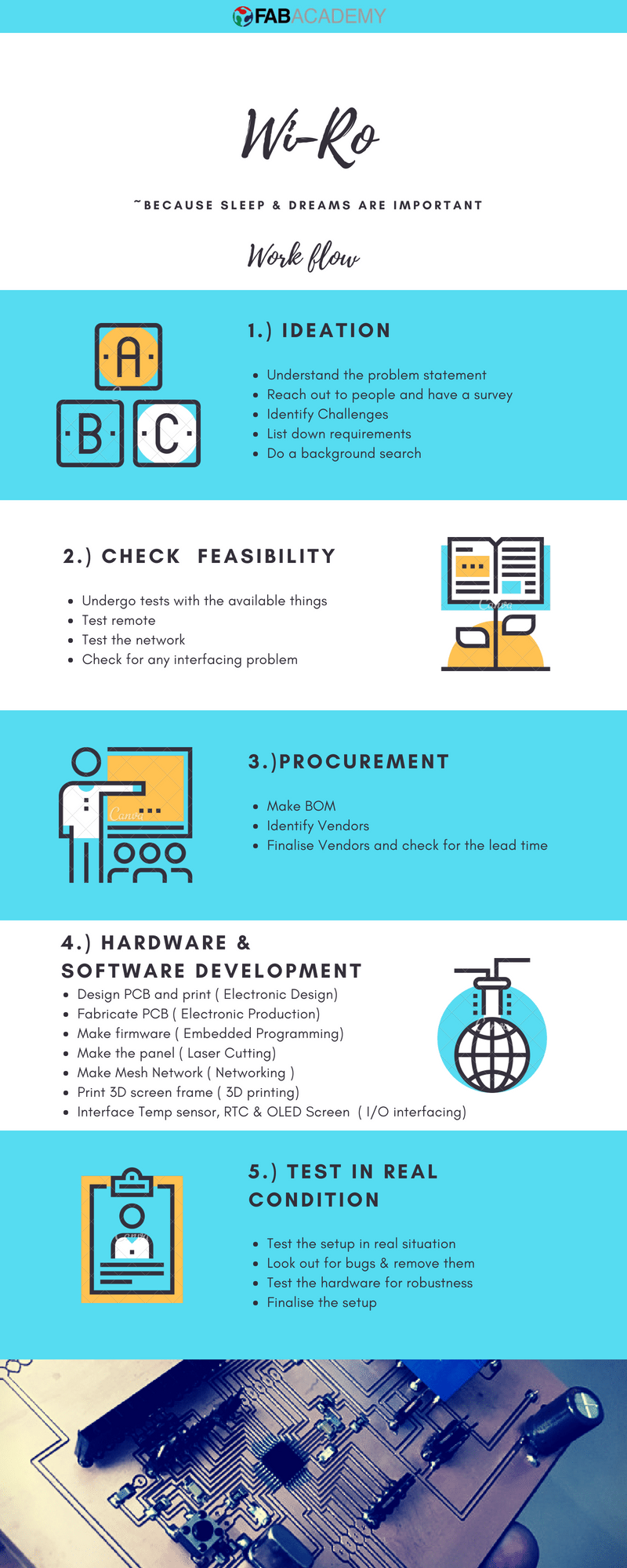
Ideation Stage
You may read about my Final Project Wi-Ro, From this LINK
Checking Feasability
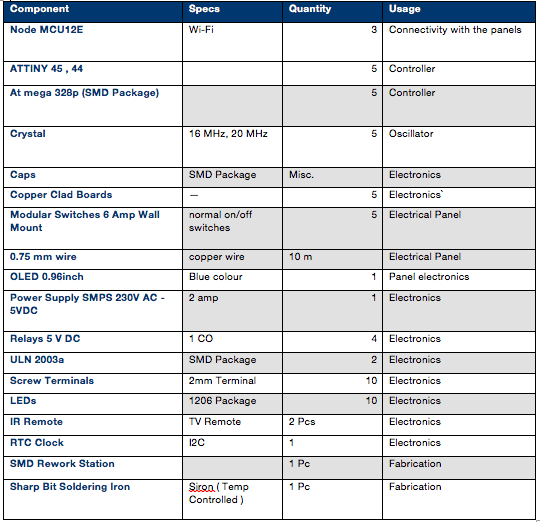
Procurement
Hardware and Software development
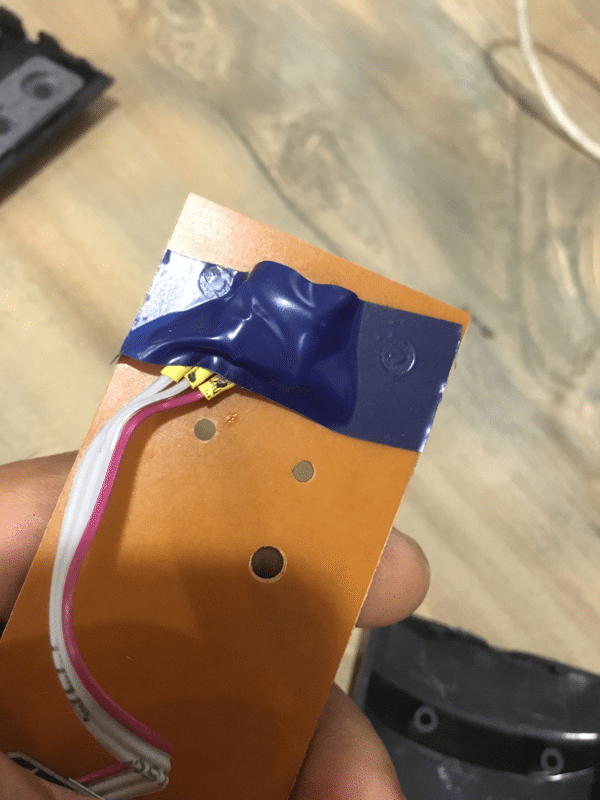
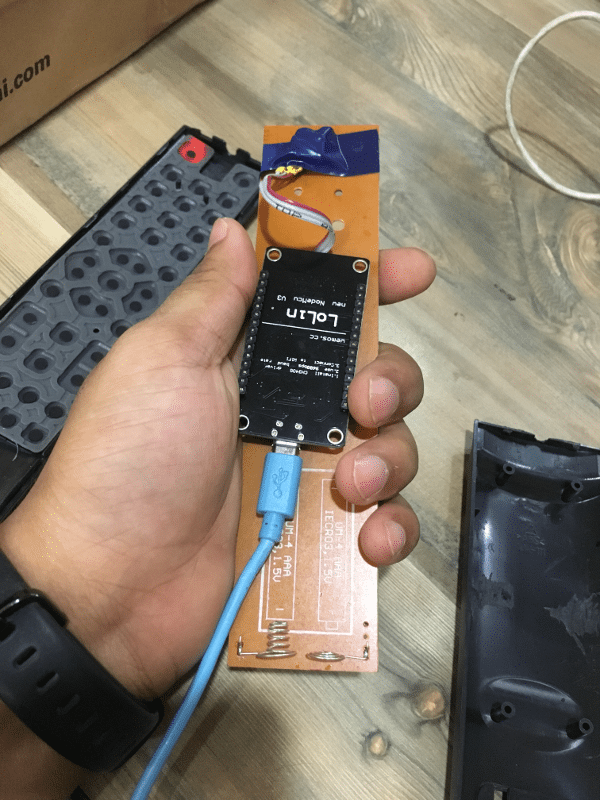
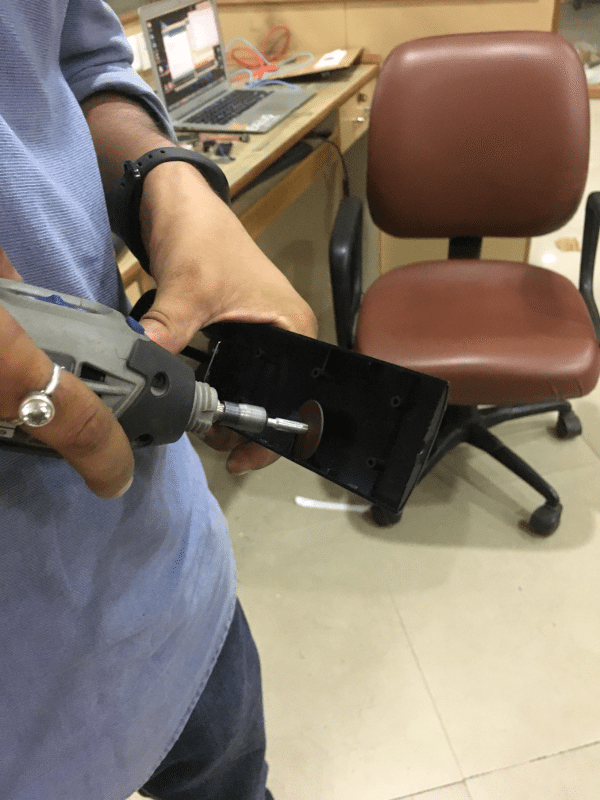
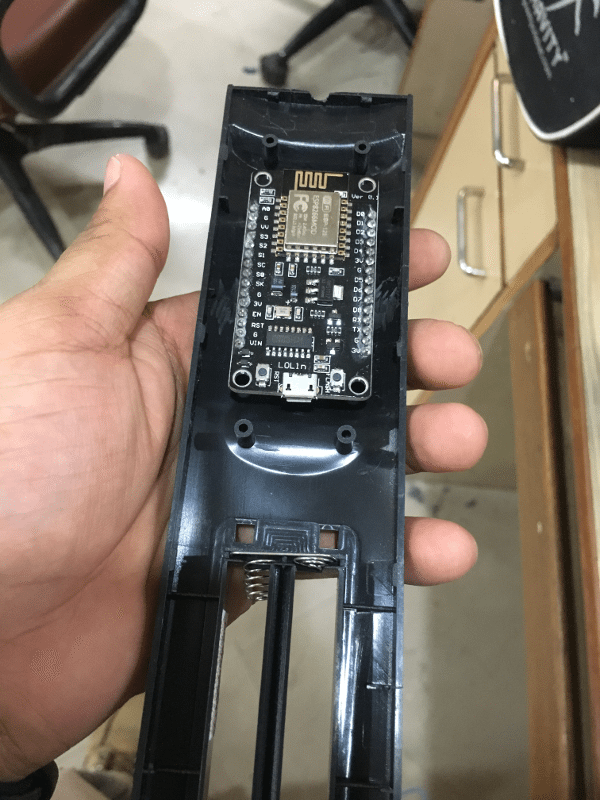
Hacking into IR Remote

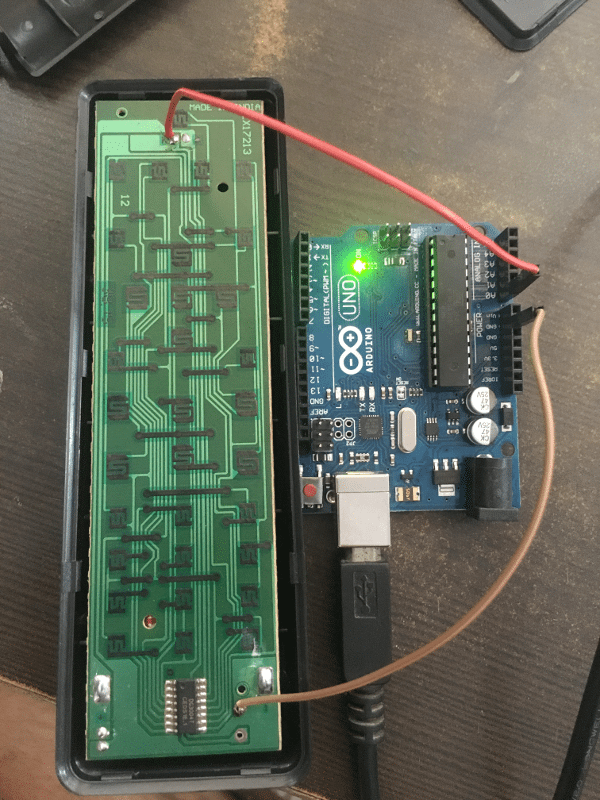





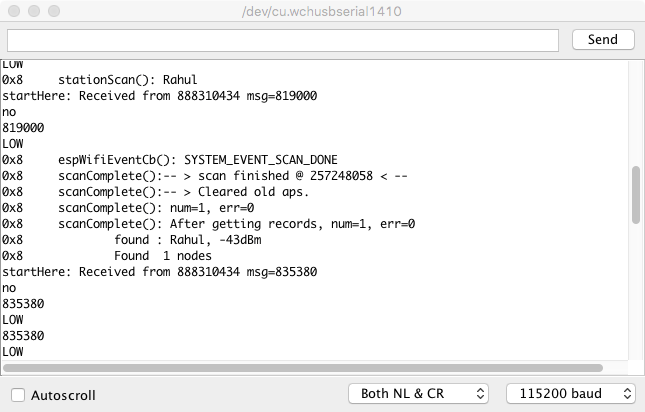
Testing the network
#include "painlessMesh.h" #define LED 2 // GPIO #define BLINK_PERIOD 3000 #define BLINK_DURATION 100 #define MESH_SSID "Rahul" #define MESH_PASSWORD "heyo1234" #define MESH_PORT 5555 painlessMesh mesh; bool calc_delay = false; SimpleListnodes; long int rahul; void sendMessage() ; // Prototype Task taskSendMessage( TASK_SECOND * 1, TASK_FOREVER, &sendMessage ); // start with a one second interval // Task to blink the number of nodes Task blinkNoNodes; bool onFlag = false; void setup() { Serial.begin(115200); pinMode(LED, OUTPUT); pinMode(D2, INPUT); pinMode(D1, INPUT); //mesh.setDebugMsgTypes( ERROR | MESH_STATUS | CONNECTION | SYNC | COMMUNICATION | GENERAL | MSG_TYPES | REMOTE ); // all types on //mesh.setDebugMsgTypes(ERROR | DEBUG | CONNECTION | COMMUNICATION); // set before init() so that you can see startup messages mesh.setDebugMsgTypes(ERROR | DEBUG | CONNECTION); // set before init() so that you can see startup messages mesh.init(MESH_SSID, MESH_PASSWORD, MESH_PORT); mesh.onReceive(&receivedCallback); mesh.onNewConnection(&newConnectionCallback); mesh.onChangedConnections(&changedConnectionCallback); mesh.onNodeTimeAdjusted(&nodeTimeAdjustedCallback); mesh.onNodeDelayReceived(&delayReceivedCallback); mesh.scheduler.addTask( taskSendMessage ); taskSendMessage.enable() ; blinkNoNodes.set(BLINK_PERIOD, (mesh.getNodeList().size() + 1) * 2, []() { // If on, switch off, else switch on if (onFlag) onFlag = false; else onFlag = true; blinkNoNodes.delay(BLINK_DURATION); if (blinkNoNodes.isLastIteration()) { blinkNoNodes.setIterations((mesh.getNodeList().size() + 1) * 2); blinkNoNodes.enableDelayed(BLINK_PERIOD - (mesh.getNodeTime() % (BLINK_PERIOD*1000))/1000); } }); mesh.scheduler.addTask(blinkNoNodes); blinkNoNodes.enable(); randomSeed(analogRead(A0)); } void loop() { mesh.update(); digitalWrite(LED, !onFlag); } void sendMessage() { String msg = "Hello from node "; msg += mesh.getNodeId(); msg += " myFreeMemory: " + String(ESP.getFreeHeap()); msg += " noTasks: " + String(mesh.scheduler.size()); bool error = mesh.sendBroadcast(msg); if (calc_delay) { SimpleList ::iterator node = nodes.begin(); while (node != nodes.end()) { mesh.startDelayMeas(*node); node++; } calc_delay = false; } Serial.printf("Sending message: %s\n", msg.c_str()); taskSendMessage.setInterval( random(TASK_SECOND * 1, TASK_SECOND * 5)); // between 1 and 5 seconds } void receivedCallback(uint32_t from, String & msg) { Serial.printf("startHere: Received from %u msg=%s\n", from, msg.c_str()); String str = msg.c_str(); // Serial.println(str[2]); if(str[2]=='l') { Serial.println("yes"); digitalWrite(D1, HIGH); } else { Serial.println("no"); digitalWrite(D1, LOW); } } void newConnectionCallback(uint32_t nodeId) { onFlag = false; blinkNoNodes.setIterations((mesh.getNodeList().size() + 1) * 2); blinkNoNodes.enableDelayed(BLINK_PERIOD - (mesh.getNodeTime() % (BLINK_PERIOD*1000))/1000); Serial.printf("--> startHere: New Connection, nodeId = %u\n", nodeId); } void changedConnectionCallback() { Serial.printf("Changed connections %s\n", mesh.subConnectionJson().c_str()); onFlag = false; blinkNoNodes.setIterations((mesh.getNodeList().size() + 1) * 2); blinkNoNodes.enableDelayed(BLINK_PERIOD - (mesh.getNodeTime() % (BLINK_PERIOD*1000))/1000); nodes = mesh.getNodeList(); Serial.printf("Num nodes: %d\n", nodes.size()); Serial.printf("Connection list:"); SimpleList ::iterator node = nodes.begin(); while (node != nodes.end()) { Serial.printf(" %u", *node); node++; } Serial.println(); calc_delay = true; } void nodeTimeAdjustedCallback(int32_t offset) { Serial.printf("Adjusted time %u. Offset = %d\n", mesh.getNodeTime(), offset); } void delayReceivedCallback(uint32_t from, int32_t delay) { Serial.printf("Delay to node %u is %d us\n", from, delay); }
 Download Test Codes/Library for Mesh Network
Download Test Codes/Library for Mesh Network
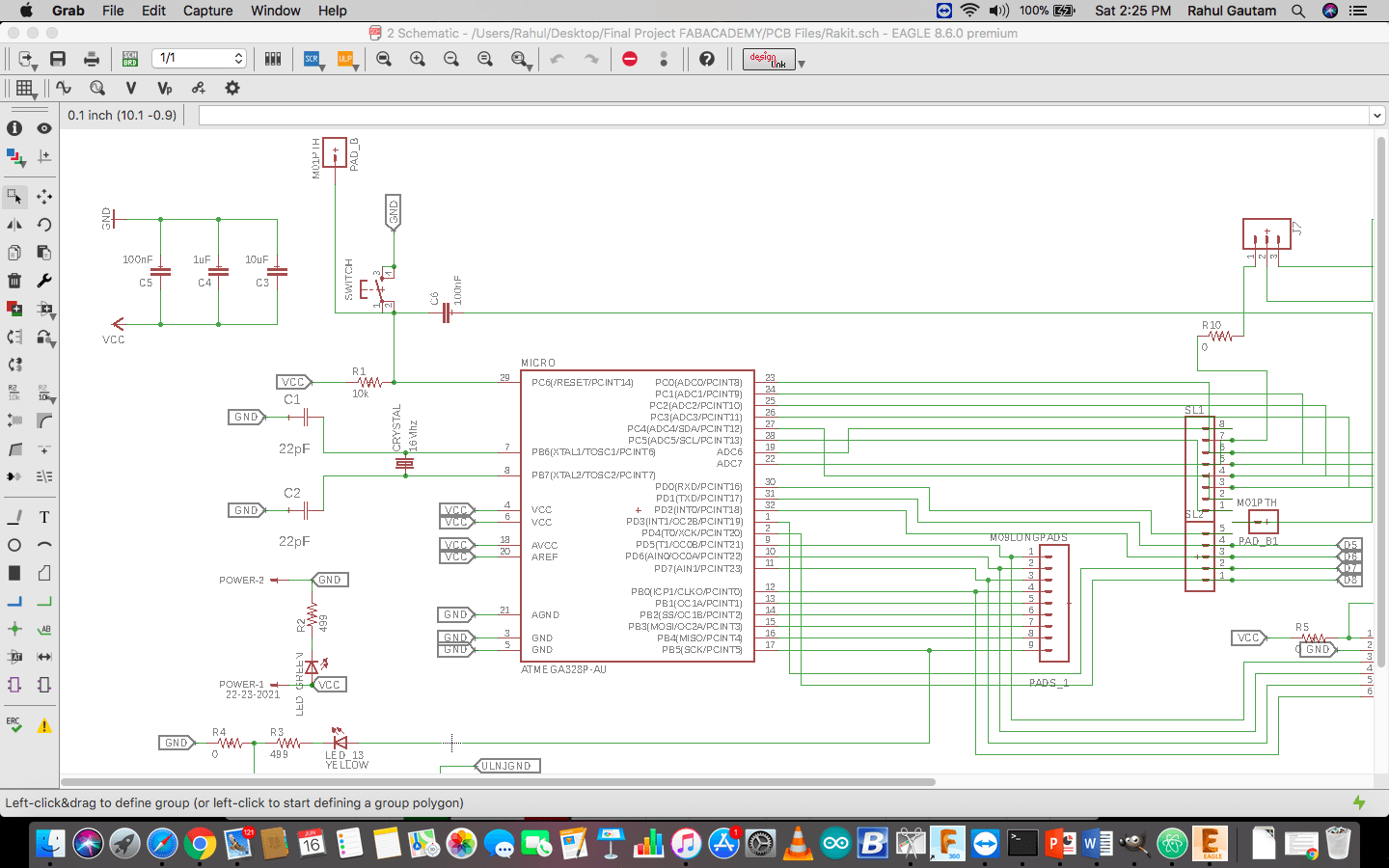
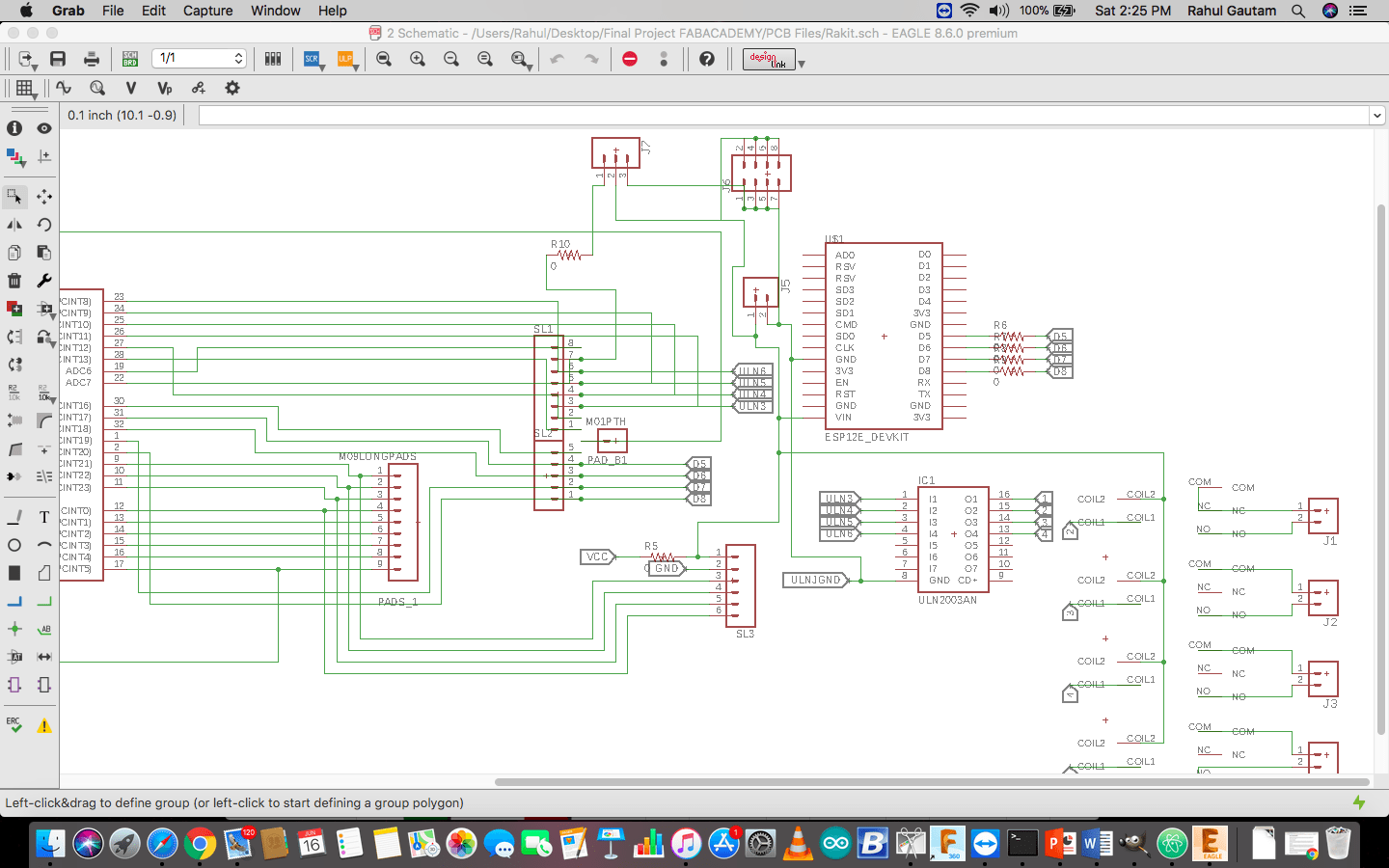
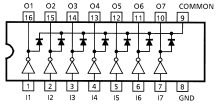
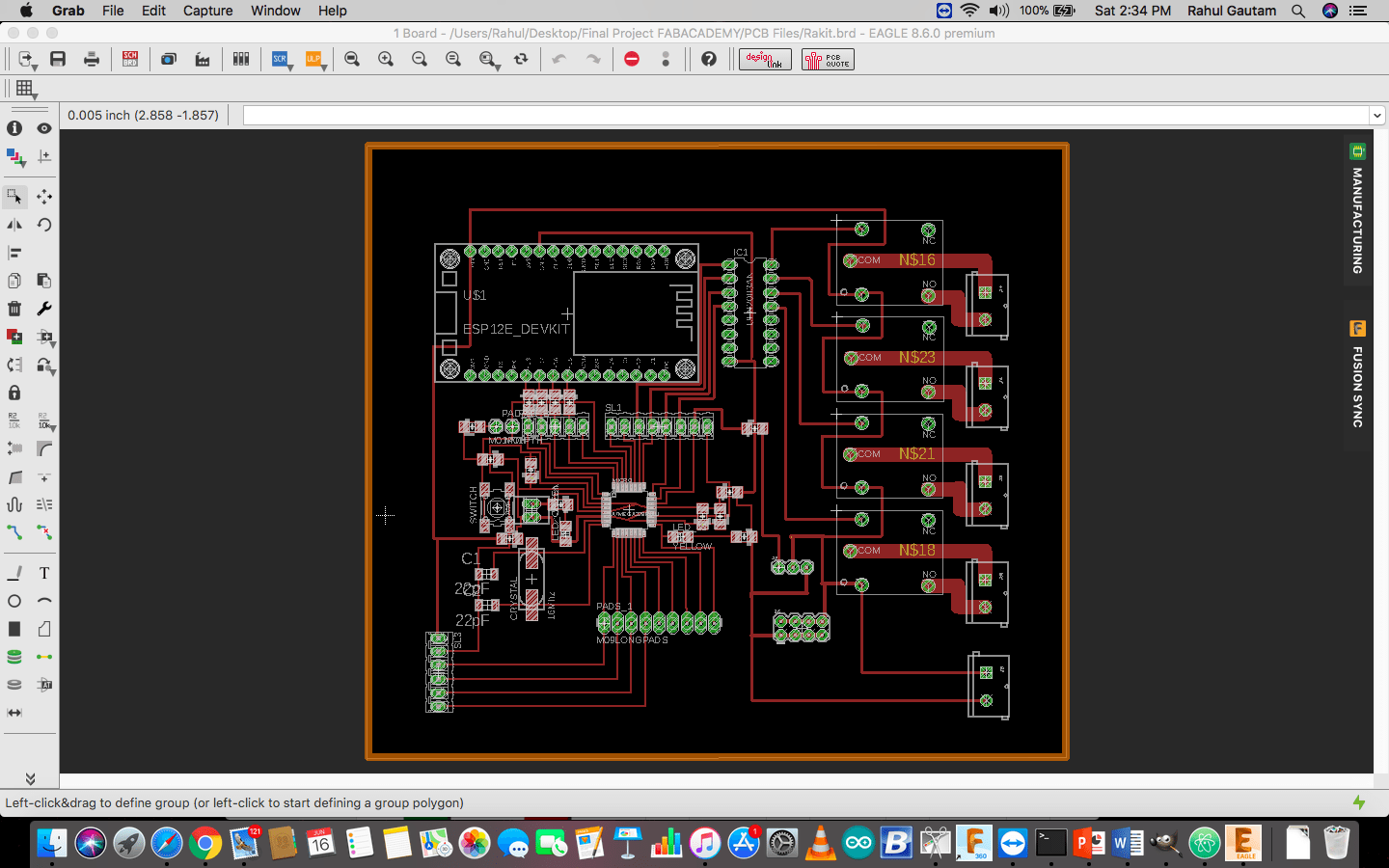
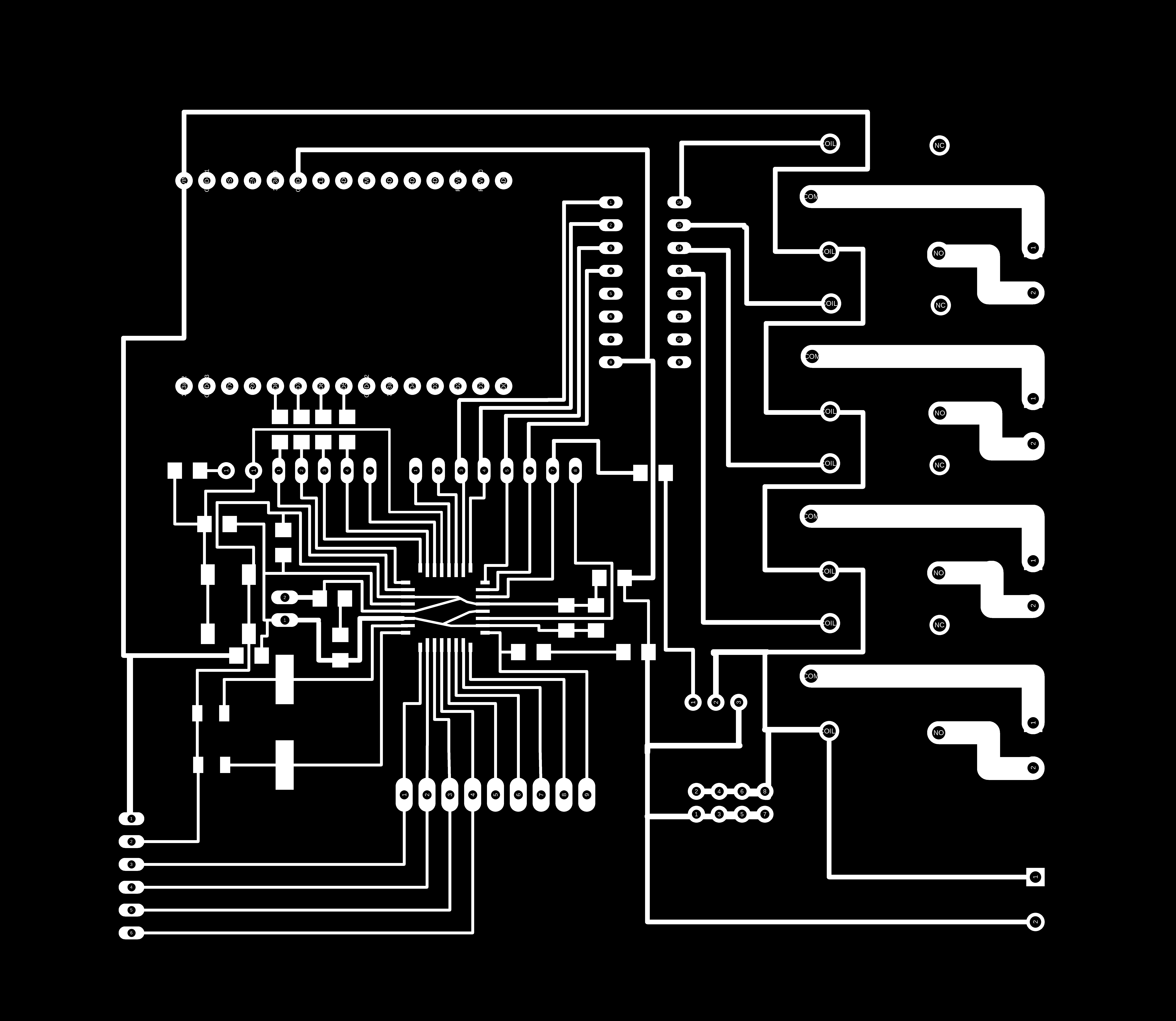
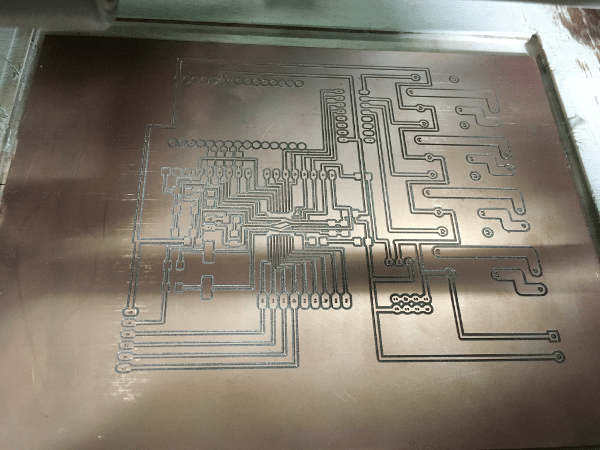
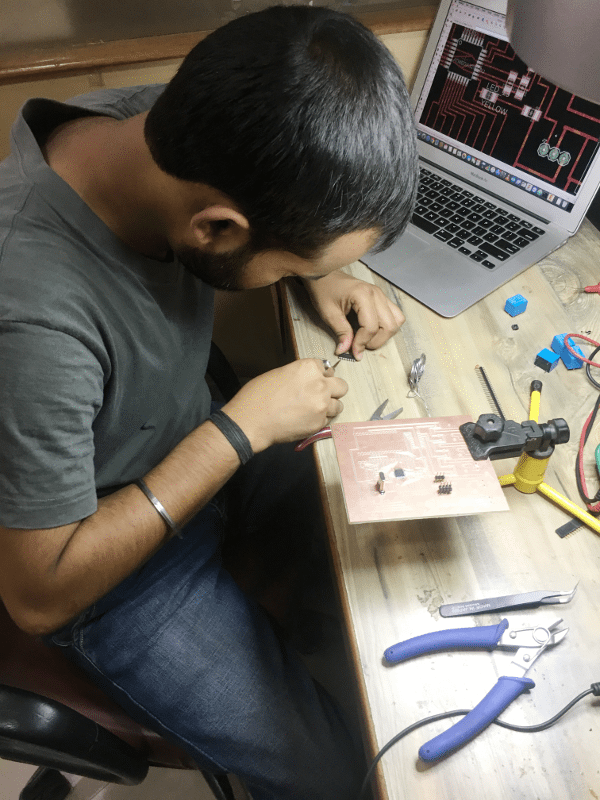
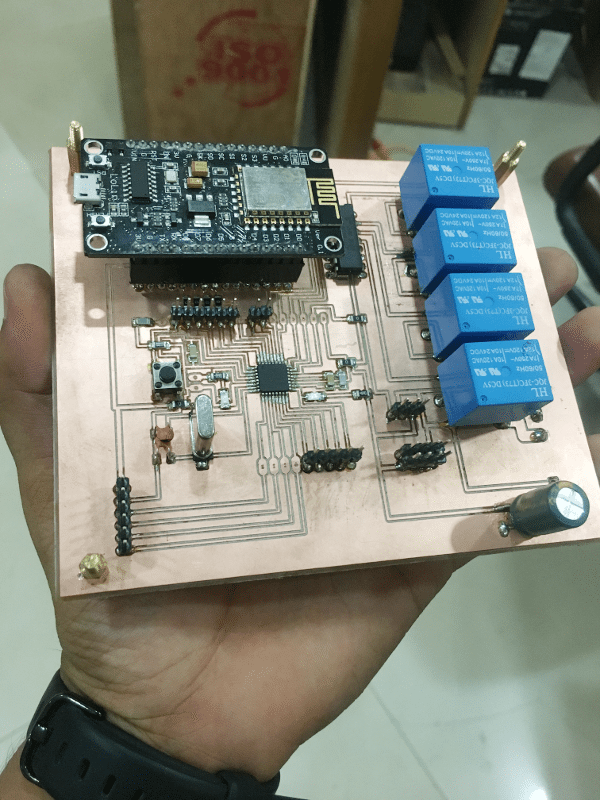
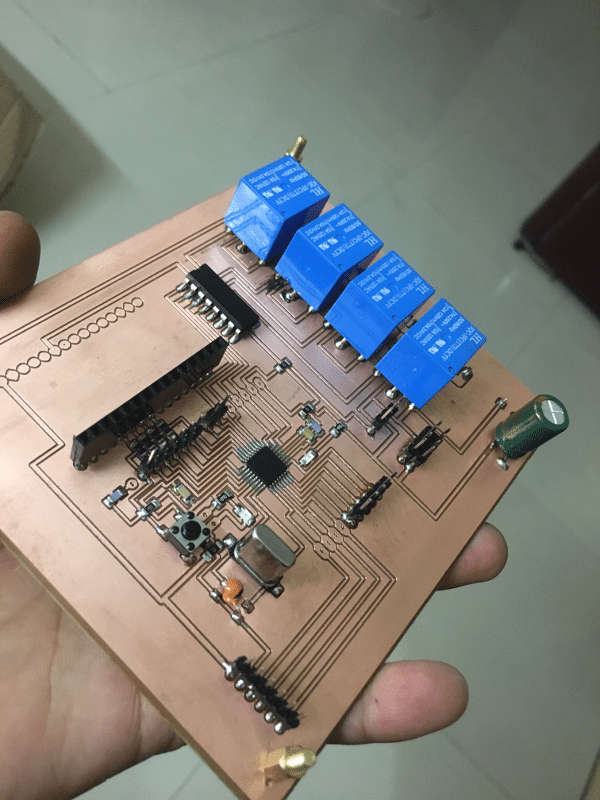
Making PCB
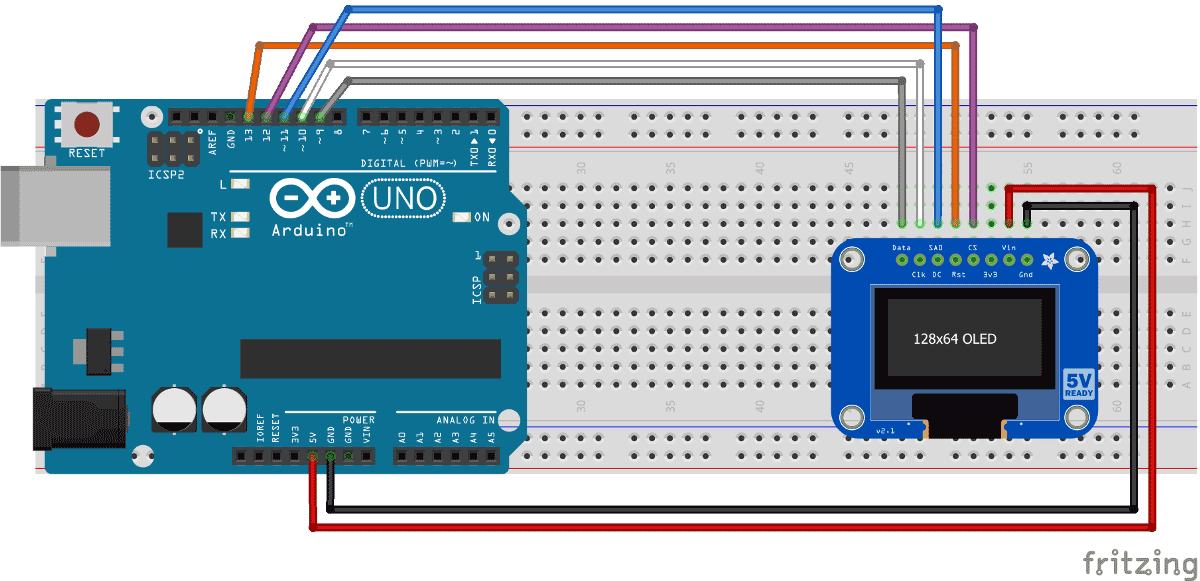
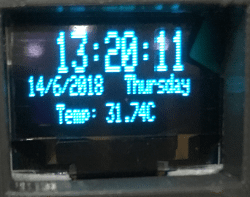
Testing OLED with the Board
#include "SPI.h"
#include "Wire.h"
#include "Adafruit_GFX.h"
#include "Adafruit_SSD1306.h"
// If using software SPI (the default case):
#define OLED_MOSI 5
#define OLED_CLK 6
#define OLED_DC 7
#define OLED_CS 9
#define OLED_RESET 8
Adafruit_SSD1306 display(OLED_MOSI, OLED_CLK, OLED_DC, OLED_RESET, OLED_CS);
/* Uncomment this block to use hardware SPI
#define OLED_DC 6
#define OLED_CS 7
#define OLED_RESET 8
Adafruit_SSD1306 display(OLED_DC, OLED_RESET, OLED_CS);
*/
#define NUMFLAKES 10
#define XPOS 0
#define YPOS 1
#define DELTAY 2
#define LOGO16_GLCD_HEIGHT 16
#define LOGO16_GLCD_WIDTH 16
static const unsigned char PROGMEM logo16_glcd_bmp[] =
{ B00000000, B11000000,
B00000001, B11000000,
B00000001, B11000000,
B00000011, B11100000,
B11110011, B11100000,
B11111110, B11111000,
B01111110, B11111111,
B00110011, B10011111,
B00011111, B11111100,
B00001101, B01110000,
B00011011, B10100000,
B00111111, B11100000,
B00111111, B11110000,
B01111100, B11110000,
B01110000, B01110000,
B00000000, B00110000 };
#if (SSD1306_LCDHEIGHT != 32)
#error("Height incorrect, please fix Adafruit_SSD1306.h!");
#endif
void setup() {
Serial.begin(9600);
// by default, we'll generate the high voltage from the 3.3v line internally! (neat!)
display.begin(SSD1306_SWITCHCAPVCC);
// init done
// Show image buffer on the display hardware.
// Since the buffer is intialized with an Adafruit splashscreen
// internally, this will display the splashscreen.
display.display();
delay(2000);
// Clear the buffer.
display.clearDisplay();
// draw a single pixel
display.drawPixel(10, 10, WHITE);
// Show the display buffer on the hardware.
// NOTE: You _must_ call display after making any drawing commands
// to make them visible on the display hardware!
display.display();
delay(2000);
display.clearDisplay();
// draw many lines
testdrawline();
display.display();
delay(2000);
display.clearDisplay();
// draw rectangles
testdrawrect();
display.display();
delay(2000);
display.clearDisplay();
// draw multiple rectangles
testfillrect();
display.display();
delay(2000);
display.clearDisplay();
// draw mulitple circles
testdrawcircle();
display.display();
delay(2000);
display.clearDisplay();
// draw a white circle, 10 pixel radius
display.fillCircle(display.width()/2, display.height()/2, 10, WHITE);
display.display();
delay(2000);
display.clearDisplay();
testdrawroundrect();
delay(2000);
display.clearDisplay();
testfillroundrect();
delay(2000);
display.clearDisplay();
testdrawtriangle();
delay(2000);
display.clearDisplay();
testfilltriangle();
delay(2000);
display.clearDisplay();
// draw the first ~12 characters in the font
testdrawchar();
display.display();
delay(2000);
display.clearDisplay();
// draw scrolling text
testscrolltext();
delay(2000);
display.clearDisplay();
// text display tests
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.println("Hello, world!");
display.setTextColor(BLACK, WHITE); // 'inverted' text
display.println(3.141592);
display.setTextSize(2);
display.setTextColor(WHITE);
display.print("0x"); display.println(0xDEADBEEF, HEX);
display.display();
delay(2000);
display.clearDisplay();
// miniature bitmap display
display.drawBitmap(30, 16, logo16_glcd_bmp, 16, 16, 1);
display.display();
// invert the display
display.invertDisplay(true);
delay(1000);
display.invertDisplay(false);
delay(1000);
display.clearDisplay();
// draw a bitmap icon and 'animate' movement
testdrawbitmap(logo16_glcd_bmp, LOGO16_GLCD_HEIGHT, LOGO16_GLCD_WIDTH);
}
void loop() {
}
void testdrawbitmap(const uint8_t *bitmap, uint8_t w, uint8_t h) {
uint8_t icons[NUMFLAKES][3];
// initialize
for (uint8_t f=0; f< NUMFLAKES; f++) {
icons[f][XPOS] = random(display.width());
icons[f][YPOS] = 0;
icons[f][DELTAY] = random(5) + 1;
Serial.print("x: ");
Serial.print(icons[f][XPOS], DEC);
Serial.print(" y: ");
Serial.print(icons[f][YPOS], DEC);
Serial.print(" dy: ");
Serial.println(icons[f][DELTAY], DEC);
}
while (1) {
// draw each icon
for (uint8_t f=0; f< NUMFLAKES; f++) {
display.drawBitmap(icons[f][XPOS], icons[f][YPOS], bitmap, w, h, WHITE);
}
display.display();
delay(200);
// then erase it + move it
for (uint8_t f=0; f< NUMFLAKES; f++) {
display.drawBitmap(icons[f][XPOS], icons[f][YPOS], bitmap, w, h, BLACK);
// move it
icons[f][YPOS] += icons[f][DELTAY];
// if its gone, reinit
if (icons[f][YPOS] > display.height()) {
icons[f][XPOS] = random(display.width());
icons[f][YPOS] = 0;
icons[f][DELTAY] = random(5) + 1;
}
}
}
}
void testdrawchar(void) {
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0,0);
for (uint8_t i=0; i < 168; i++) {
if (i == '\n') continue;
display.write(i);
if ((i > 0) && (i % 21 == 0))
display.println();
}
display.display();
}
void testdrawcircle(void) {
for (int16_t i=0; i0; i-=5) {
display.fillTriangle(display.width()/2, display.height()/2-i,
display.width()/2-i, display.height()/2+i,
display.width()/2+i, display.height()/2+i, WHITE);
if (color == WHITE) color = BLACK;
else color = WHITE;
display.display();
}
}
void testdrawroundrect(void) {
for (int16_t i=0; i=0; i-=4) {
display.drawLine(0, display.height()-1, display.width()-1, i, WHITE);
display.display();
}
delay(250);
display.clearDisplay();
for (int16_t i=display.width()-1; i>=0; i-=4) {
display.drawLine(display.width()-1, display.height()-1, i, 0, WHITE);
display.display();
}
for (int16_t i=display.height()-1; i>=0; i-=4) {
display.drawLine(display.width()-1, display.height()-1, 0, i, WHITE);
display.display();
}
delay(250);
display.clearDisplay();
for (int16_t i=0; i<=display.height(); i+=4) {
display.drawLine(display.width()-1, 0, 0, i, WHITE);
display.display();
}
for (int16_t i=0; i<=display.width(); i+=4) {
display.drawLine(display.width()-1, 0, i, display.height()-1, WHITE);
display.display();
}
delay(250);
}
void testscrolltext(void) {
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(10,0);
display.clearDisplay();
display.println("scroll");
display.display();
display.startscrollright(0x00, 0x0F);
delay(2000);
display.stopscroll();
delay(1000);
display.startscrollleft(0x00, 0x0F);
delay(2000);
display.stopscroll();
delay(1000);
display.startscrolldiagright(0x00, 0x07);
delay(2000);
display.startscrolldiagleft(0x00, 0x07);
delay(2000);
display.stopscroll();
}
int val;
int tempPin = 7;
void setup()
{
Serial.begin(9600);
}
void loop()
{
val = analogRead(tempPin);
float mv = ( val/1024.0)*5000;
float cel = mv/10;
float farh = (cel*9)/5 + 32;
Serial.print("TEMPRATURE = ");
Serial.print(cel);
Serial.print("*C");
Serial.println();
delay(1000);
}
#include "SPI.h"
#include "Wire.h"
#include "Adafruit_GFX.h"
#include "Adafruit_SSD1306.h"
#include "TimeLib.h"
#include "DS1307RTC.h"
//DS3231 rtc(SDA, SCL);
#define OLED_MOSI 5
#define OLED_CLK 6
#define OLED_DC 7
#define OLED_CS 9
#define OLED_RESET 8
Adafruit_SSD1306 display(OLED_MOSI, OLED_CLK, OLED_DC, OLED_RESET, OLED_CS);
const int sensor_pin = A7;
float temp;
float output;
float ra;
void setup()
{
Serial.begin(9600);
pinMode(sensor_pin,INPUT);
display.begin(SSD1306_SWITCHCAPVCC);
Serial.println("hello");
//rtc.setDOW(WEDNESDAY); // Set Day-of-Week to SUNDAY
//rtc.setTime(19, 02, 0); // Set the time to 12:00:00 (24hr format)
//rtc.setDate(7, 12, 2017); // Set the date to June 6th, 2017
display.clearDisplay();
display.setTextColor(WHITE);
display.setTextSize(2);
display.setCursor(0,0);
display.print(" Wi-Ro ");
display.setCursor(0,17);
display.print(" by Rahul");
display.display();
delay(5000);
}
void loop()
{
tmElements_t tm;
output = analogRead(sensor_pin);
ra = ( output/1024.0)*5000;
temp = ra/10;
if (RTC.read(tm)) {
display.clearDisplay();
display.setTextSize(2);
display.setCursor(20,0);
display.print(tm.Hour);
display.print(':');
display.print(tm.Minute);
display.print(':');
display.print(tm.Second);
display.setTextSize(1);
display.setCursor(0,15);
display.print(tm.Day);
display.print('/');
display.print(tm.Month);
display.print('/');
display.print(tmYearToCalendar(tm.Year));
display.setTextSize(1);
display.setCursor(70,15);
int r = dow(tmYearToCalendar(tm.Year),tm.Month,tm.Day);
switch(r)
{
case 1 :
display.print("Tuesday");
break;
case 2 :
display.print("Wednesday");
break;
case 3:
display.print("Thursday");
break;
case 4:
display.print("Friday");
break;
case 5:
display.println("Saturday");
break;
case 6:
display.print("Sunday");
break;
case 7:
display.print("Monday");
break;
default:
display.print("hello");
}
//display.print("Wednesday");
display.setTextSize(1);
display.setCursor(20,25);
display.print("Temp: ");
display.print(temp);
display.print("C");
display.display();
}
delay(1000);
}
int leap (int year)
{
return year*365 + (year/4) - (year/100) + (year/400);
}
int zeller (int year, int month, int day)
{
year += ((month+9)/12) - 1;
month = (month+9) % 12;
return leap (year) + month*30 + ((6*month+5)/10) + day + 1;
}
int dow (int year, int month, int day)
{
return (zeller (year, month, day) % 7) + 1;
}
Download Code/Arduino Library
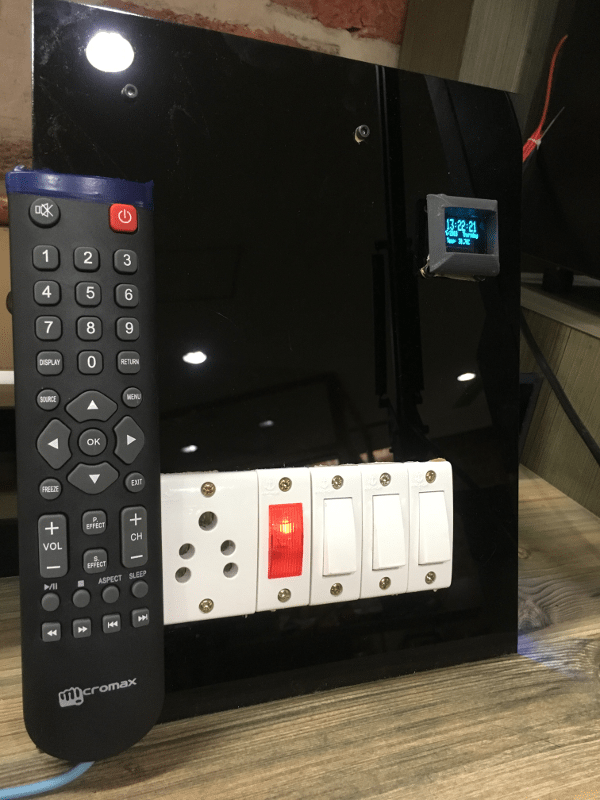
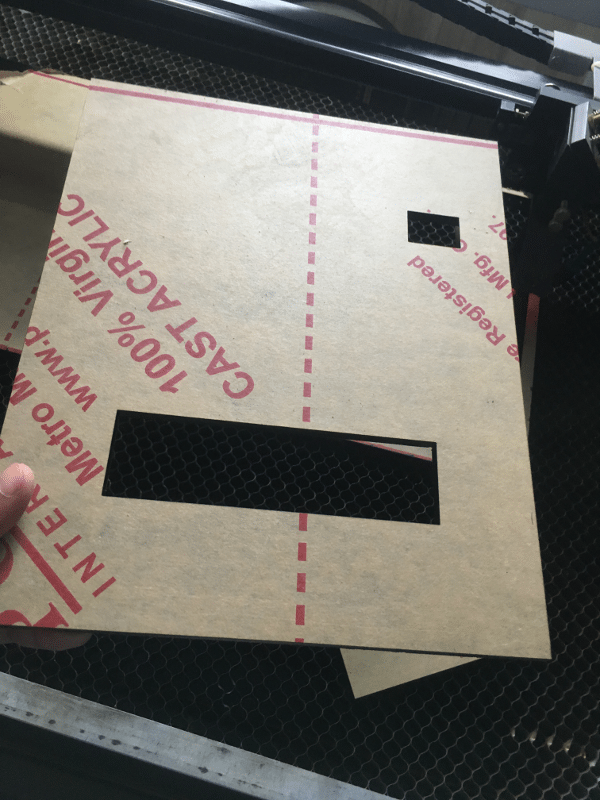
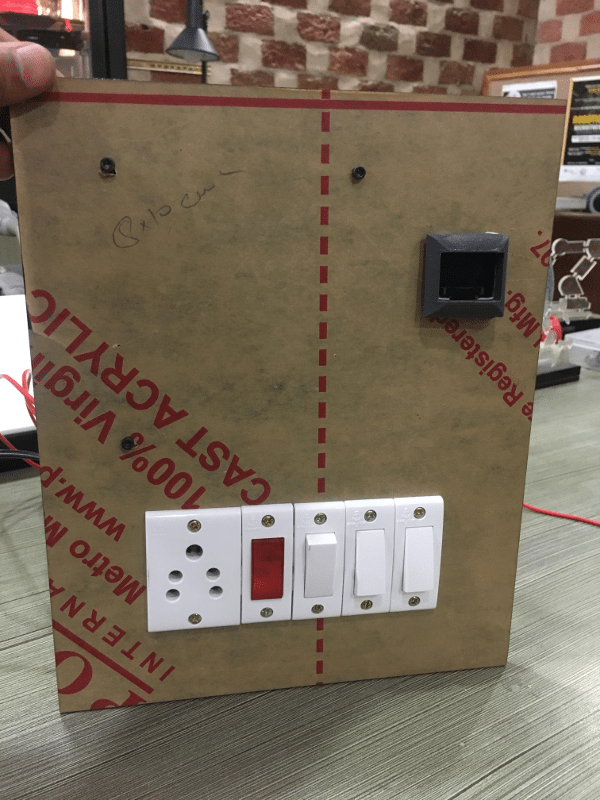
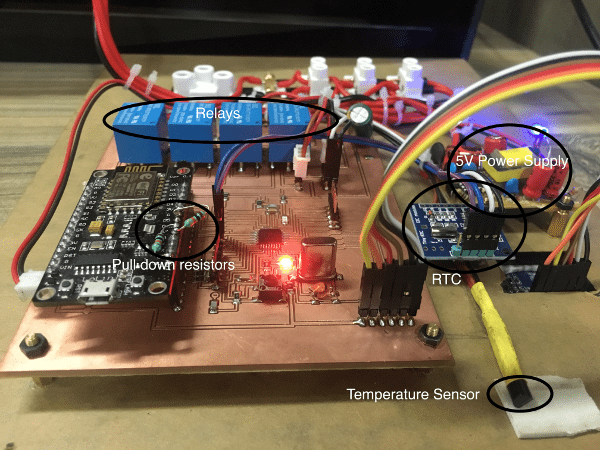
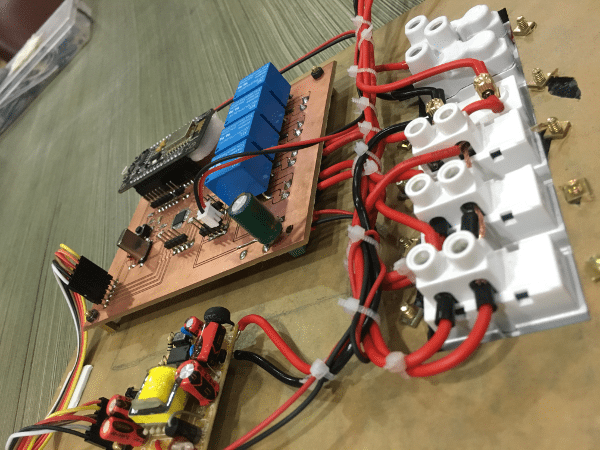
Electrical Panel
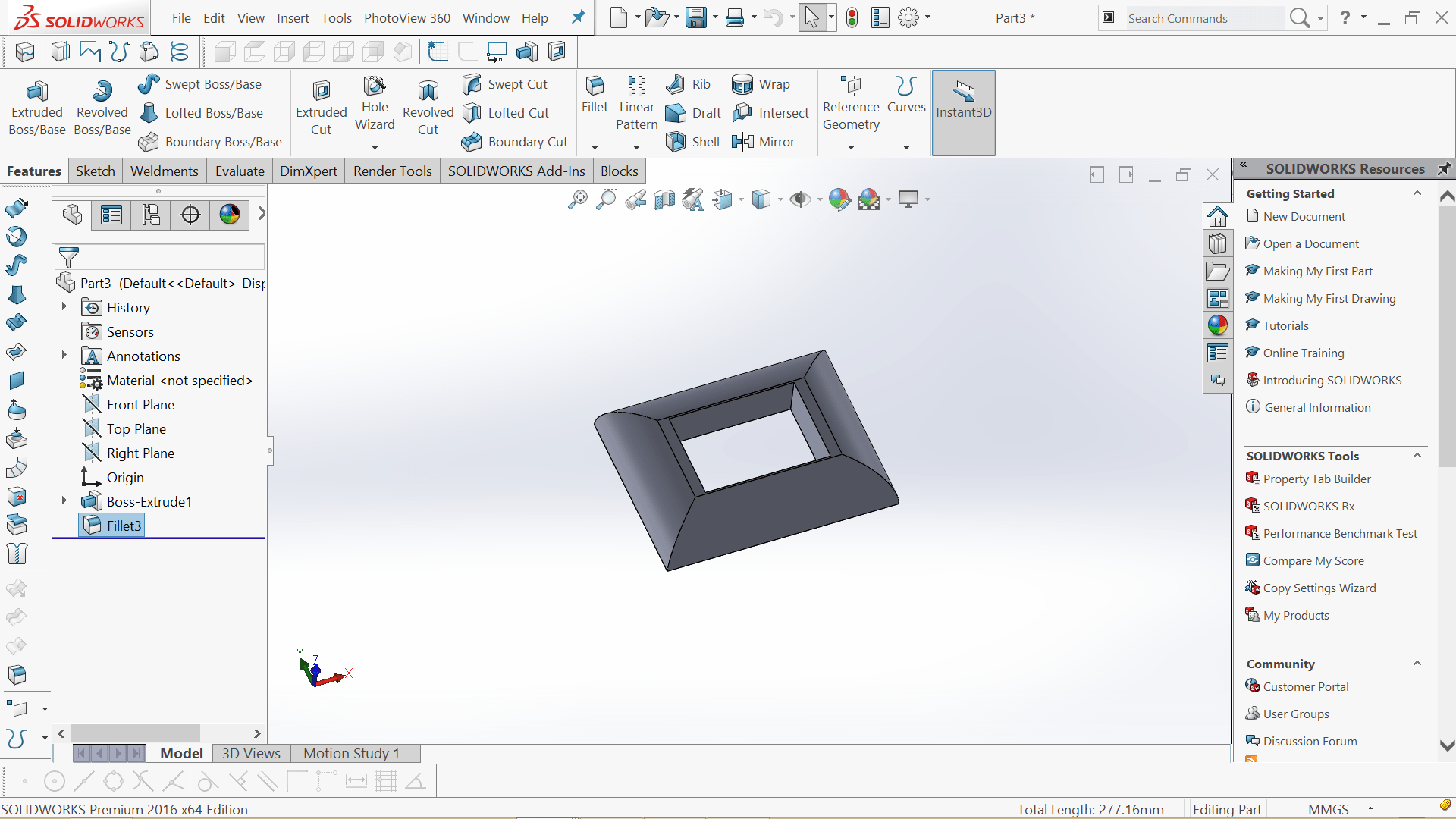
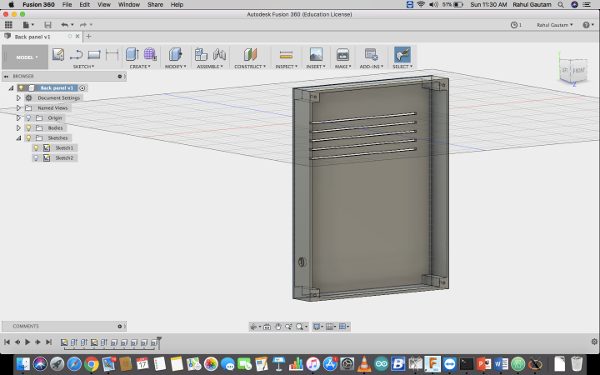
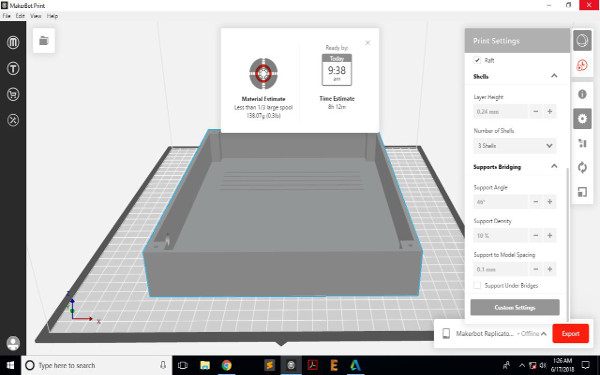
3D Frame for OLED Screen
Panel Wiring
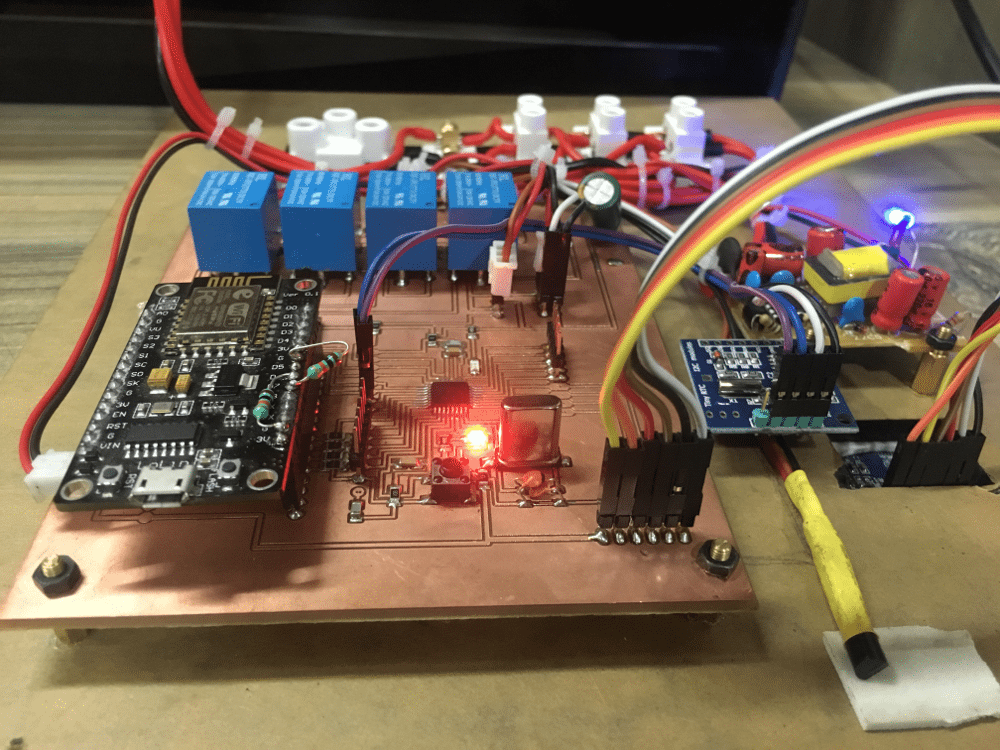
Embedded Codes
#ifndef UNIT_TEST
#include "Arduino.h"
#endif
#include "IRremoteESP8266.h"
#include "IRrecv.h"
#include "IRutils.h"
#include "painlessMesh.h"
String msg = "000000";
#define LED 2 // GPIO
#define BLINK_PERIOD 3000
#define BLINK_DURATION 100
#define MESH_SSID "Rahul"
#define MESH_PASSWORD "heyo1234"
#define MESH_PORT 5555
uint16_t RECV_PIN = 14;
IRrecv irrecv(RECV_PIN);
int atr;
decode_results results;
painlessMesh mesh;
bool calc_delay = false;
SimpleList nodes;
long int rahul;
void sendMessage() ; // Prototype
Task taskSendMessage( TASK_SECOND * 1, TASK_FOREVER, &sendMessage ); // start with a one second interval
// Task to blink the number of nodes
Task blinkNoNodes;
bool onFlag = false;
void setup() {
Serial.begin(115200);
//mesh.setDebugMsgTypes( ERROR | MESH_STATUS | CONNECTION | SYNC | COMMUNICATION | GENERAL | MSG_TYPES | REMOTE ); // all types on
//mesh.setDebugMsgTypes(ERROR | DEBUG | CONNECTION | COMMUNICATION); // set before init() so that you can see startup messages
mesh.setDebugMsgTypes(ERROR | DEBUG | CONNECTION); // set before init() so that you can see startup messages
mesh.init(MESH_SSID, MESH_PASSWORD, MESH_PORT);
mesh.onReceive(&receivedCallback);
mesh.onNewConnection(&newConnectionCallback);
mesh.onChangedConnections(&changedConnectionCallback);
mesh.onNodeTimeAdjusted(&nodeTimeAdjustedCallback);
mesh.onNodeDelayReceived(&delayReceivedCallback);
mesh.scheduler.addTask( taskSendMessage );
taskSendMessage.enable() ;
blinkNoNodes.set(BLINK_PERIOD, (mesh.getNodeList().size() + 1) * 2, []() {
// If on, switch off, else switch on
if (onFlag)
onFlag = false;
else
onFlag = true;
blinkNoNodes.delay(BLINK_DURATION);
if (blinkNoNodes.isLastIteration()) {
blinkNoNodes.setIterations((mesh.getNodeList().size() + 1) * 2);
blinkNoNodes.enableDelayed(BLINK_PERIOD -
(mesh.getNodeTime() % (BLINK_PERIOD*1000))/1000);
}
});
mesh.scheduler.addTask(blinkNoNodes);
blinkNoNodes.enable();
randomSeed(analogRead(A0));
irrecv.enableIRIn(); // Start the receiver
}
void loop() {
mesh.update();
digitalWrite(LED, !onFlag);
if (irrecv.decode(&results)) {
// print() & println() can't handle printing long longs. (uint64_t)
atr= (results.value);
msg= String(atr);
irrecv.resume();
delay(10);
}
}
void sendMessage() {
bool error = mesh.sendBroadcast(msg);
if (calc_delay) {
SimpleList::iterator node = nodes.begin();
while (node != nodes.end()) {
mesh.startDelayMeas(*node);
node++;
}
calc_delay = false;
}
Serial.printf("Sending message: %s\n", msg.c_str());
taskSendMessage.setInterval( random(TASK_SECOND * 1, TASK_SECOND * 5)); // between 1 and 5 seconds
}
void receivedCallback(uint32_t from, String & msg) {
Serial.printf("startHere: Received from %u msg=%s\n", from, msg.c_str());
String str = msg.c_str();
// Serial.println(str[2]);
if(str[2]=='l')
{
Serial.println("yes");
// digitalWrite(D1, HIGH);
}
else
{
Serial.println("no");
// digitalWrite(D1, LOW);
}
}
void newConnectionCallback(uint32_t nodeId) {
onFlag = false;
blinkNoNodes.setIterations((mesh.getNodeList().size() + 1) * 2);
blinkNoNodes.enableDelayed(BLINK_PERIOD - (mesh.getNodeTime() % (BLINK_PERIOD*1000))/1000);
Serial.printf("--> startHere: New Connection, nodeId = %u\n", nodeId);
}
void changedConnectionCallback() {
Serial.printf("Changed connections %s\n", mesh.subConnectionJson().c_str());
onFlag = false;
blinkNoNodes.setIterations((mesh.getNodeList().size() + 1) * 2);
blinkNoNodes.enableDelayed(BLINK_PERIOD - (mesh.getNodeTime() % (BLINK_PERIOD*1000))/1000);
nodes = mesh.getNodeList();
Serial.printf("Num nodes: %d\n", nodes.size());
Serial.printf("Connection list:");
SimpleList::iterator node = nodes.begin();
while (node != nodes.end()) {
Serial.printf(" %u", *node);
node++;
}
Serial.println();
calc_delay = true;
}
void nodeTimeAdjustedCallback(int32_t offset) {
Serial.printf("Adjusted time %u. Offset = %d\n", mesh.getNodeTime(), offset);
}
void delayReceivedCallback(uint32_t from, int32_t delay) {
Serial.printf("Delay to node %u is %d us\n", from, delay);
}
#include "painlessMesh.h"
#define LED 2 // GPIO
#define BLINK_PERIOD 3000
#define BLINK_DURATION 100
#define MESH_SSID "Rahul"
#define MESH_PASSWORD "heyo1234"
#define MESH_PORT 5555
painlessMesh mesh;
bool calc_delay = false;
SimpleList nodes;
long int rahul;
void sendMessage() ; // Prototype
Task taskSendMessage( TASK_SECOND * 1, TASK_FOREVER, &sendMessage ); // start with a one second interval
String hello ;
// Task to blink the number of nodes
Task blinkNoNodes;
bool onFlag = false;
//String str ="123" ;
void setup() {
Serial.begin(115200);
pinMode(LED, OUTPUT);
pinMode(D7, OUTPUT);
pinMode(D6, OUTPUT);
//mesh.setDebugMsgTypes( ERROR | MESH_STATUS | CONNECTION | SYNC | COMMUNICATION | GENERAL | MSG_TYPES | REMOTE ); // all types on
//mesh.setDebugMsgTypes(ERROR | DEBUG | CONNECTION | COMMUNICATION); // set before init() so that you can see startup messages
mesh.setDebugMsgTypes(ERROR | DEBUG | CONNECTION); // set before init() so that you can see startup messages
mesh.init(MESH_SSID, MESH_PASSWORD, MESH_PORT);
mesh.onReceive(&receivedCallback);
mesh.onNewConnection(&newConnectionCallback);
mesh.onChangedConnections(&changedConnectionCallback);
mesh.onNodeTimeAdjusted(&nodeTimeAdjustedCallback);
mesh.onNodeDelayReceived(&delayReceivedCallback);
mesh.scheduler.addTask( taskSendMessage );
taskSendMessage.enable() ;
blinkNoNodes.set(BLINK_PERIOD, (mesh.getNodeList().size() + 1) * 2, []() {
// If on, switch off, else switch on
if (onFlag)
onFlag = false;
else
onFlag = true;
blinkNoNodes.delay(BLINK_DURATION);
if (blinkNoNodes.isLastIteration()) {
blinkNoNodes.setIterations((mesh.getNodeList().size() + 1) * 2);
blinkNoNodes.enableDelayed(BLINK_PERIOD -
(mesh.getNodeTime() % (BLINK_PERIOD*1000))/1000);
}
});
mesh.scheduler.addTask(blinkNoNodes);
blinkNoNodes.enable();
randomSeed(analogRead(A0));
}
void loop() {
mesh.update();
digitalWrite(LED, !onFlag);
Serial.println(hello);
if(hello=="876330")
{
digitalWrite(D6, HIGH);
//Serial.println("d5 LOW ");
}
else if (hello=="847665")
{
digitalWrite(D6,LOW);
//Serial.println("d5 HIGH");
}
else if (hello=="843570")
{
digitalWrite(D7,HIGH);
//Serial.println("d6 LOW");
}
else if (hello=="839475")
{
digitalWrite(D7,LOW);
//Serial.println("d6 HIGH");
}
delay(500);
}
void sendMessage() {
if (calc_delay) {
SimpleList::iterator node = nodes.begin();
while (node != nodes.end()) {
mesh.startDelayMeas(*node);
node++;
}
calc_delay = false;
}
//Serial.printf("Sending message: %s\n", msg.c_str());
taskSendMessage.setInterval( random(TASK_SECOND * 1, TASK_SECOND * 5)); // between 1 and 5 seconds
}
void receivedCallback(uint32_t from, String & msg) {
Serial.printf("startHere: Received from %u msg=%s\n", from, msg.c_str());
String str = msg.c_str();
hello=str;
// Serial.println(str[2]);
if(str=="876330")
{
Serial.println("yes");
//digitalWrite(D1, HIGH);
}
else
{
Serial.println("no");
// digitalWrite(D1, LOW);
}
}
void newConnectionCallback(uint32_t nodeId) {
onFlag = false;
blinkNoNodes.setIterations((mesh.getNodeList().size() + 1) * 2);
blinkNoNodes.enableDelayed(BLINK_PERIOD - (mesh.getNodeTime() % (BLINK_PERIOD*1000))/1000);
Serial.printf("--> startHere: New Connection, nodeId = %u\n", nodeId);
}
void changedConnectionCallback() {
Serial.printf("Changed connections %s\n", mesh.subConnectionJson().c_str());
onFlag = false;
blinkNoNodes.setIterations((mesh.getNodeList().size() + 1) * 2);
blinkNoNodes.enableDelayed(BLINK_PERIOD - (mesh.getNodeTime() % (BLINK_PERIOD*1000))/1000);
nodes = mesh.getNodeList();
Serial.printf("Num nodes: %d\n", nodes.size());
Serial.printf("Connection list:");
SimpleList::iterator node = nodes.begin();
while (node != nodes.end()) {
Serial.printf(" %u", *node);
node++;
}
Serial.println();
calc_delay = true;
}
void nodeTimeAdjustedCallback(int32_t offset) {
Serial.printf("Adjusted time %u. Offset = %d\n", mesh.getNodeTime(), offset);
}
void delayReceivedCallback(uint32_t from, int32_t delay) {
Serial.printf("Delay to node %u is %d us\n", from, delay);
}
#include "SPI.h"
#include "Wire.h"
#include "Adafruit_GFX.h"
#include "Adafruit_SSD1306.h"
#include "TimeLib.h"
#include "DS1307RTC.h"
#define OLED_MOSI 5
#define OLED_CLK 6
#define OLED_DC 7
#define OLED_CS 9
#define OLED_RESET 8
Adafruit_SSD1306 display(OLED_MOSI, OLED_CLK, OLED_DC, OLED_RESET, OLED_CS);
const int sensor_pin = A7;
float temp;
float output;
float ra;
void setup()
{
Serial.begin(9600);
pinMode(2,INPUT);
pinMode(3,INPUT);
pinMode(14,OUTPUT);
pinMode(15,OUTPUT);
pinMode(sensor_pin,INPUT);
display.begin(SSD1306_SWITCHCAPVCC);
display.clearDisplay();
display.setTextColor(WHITE);
display.setTextSize(2);
display.setCursor(0,0);
display.print(" Wi-Ro ");
display.setCursor(0,17);
display.print(" by Rahul");
display.display();
delay(5000);
}
void loop()
{
tmElements_t tm;
output = analogRead(sensor_pin);
ra = ( output/1024.0)*5000;
temp = ra/10;
if (digitalRead(3)== HIGH)
{
digitalWrite(14,HIGH);
}
if (digitalRead(3)==LOW)
{
digitalWrite(14,LOW);
}
if (digitalRead(2)==HIGH)
{
digitalWrite(15,HIGH);
}
if (digitalRead(2)==LOW)
{
digitalWrite(15,LOW);
}
if (RTC.read(tm))
{
display.clearDisplay();
display.setTextSize(2);
display.setCursor(20,0);
display.print(tm.Hour);
display.print(':');
display.print(tm.Minute);
display.print(':');
display.print(tm.Second);
display.setTextSize(1);
display.setCursor(0,15);
display.print(tm.Day);
display.print('/');
display.print(tm.Month);
display.print('/');
display.print(tmYearToCalendar(tm.Year));
display.setTextSize(1);
display.setCursor(70,15);
int r = dow(tmYearToCalendar(tm.Year),tm.Month,tm.Day);
switch(r)
{
case 1 :
display.print("Tuesday");
break;
case 2 :
display.print("Wednesday");
break;
case 3:
display.print("Thursday");
break;
case 4:
display.print("Friday");
break;
case 5:
display.println("Saturday");
break;
case 6:
display.print("Sunday");
break;
case 7:
display.print("Monday");
break;
default:
display.print("hello");
}
display.setTextSize(1);
display.setCursor(20,25);
display.print("Temp: ");
display.print(temp);
display.print("C");
display.display();
}
delay(200);
}
int leap (int year)
{
return year*365 + (year/4) - (year/100) + (year/400);
}
int zeller (int year, int month, int day)
{
year += ((month+9)/12) - 1;
month = (month+9) % 12;
return leap (year) + month*30 + ((6*month+5)/10) + day + 1;
}
int dow (int year, int month, int day)
{
return (zeller (year, month, day) % 7) + 1;
}
Download Main Codes
Test in Real Conditions