Expressive Desktop Companion Robot
Final Project · Fab Academy 2026
Project Overview
Expressive Desktop Companion Robot
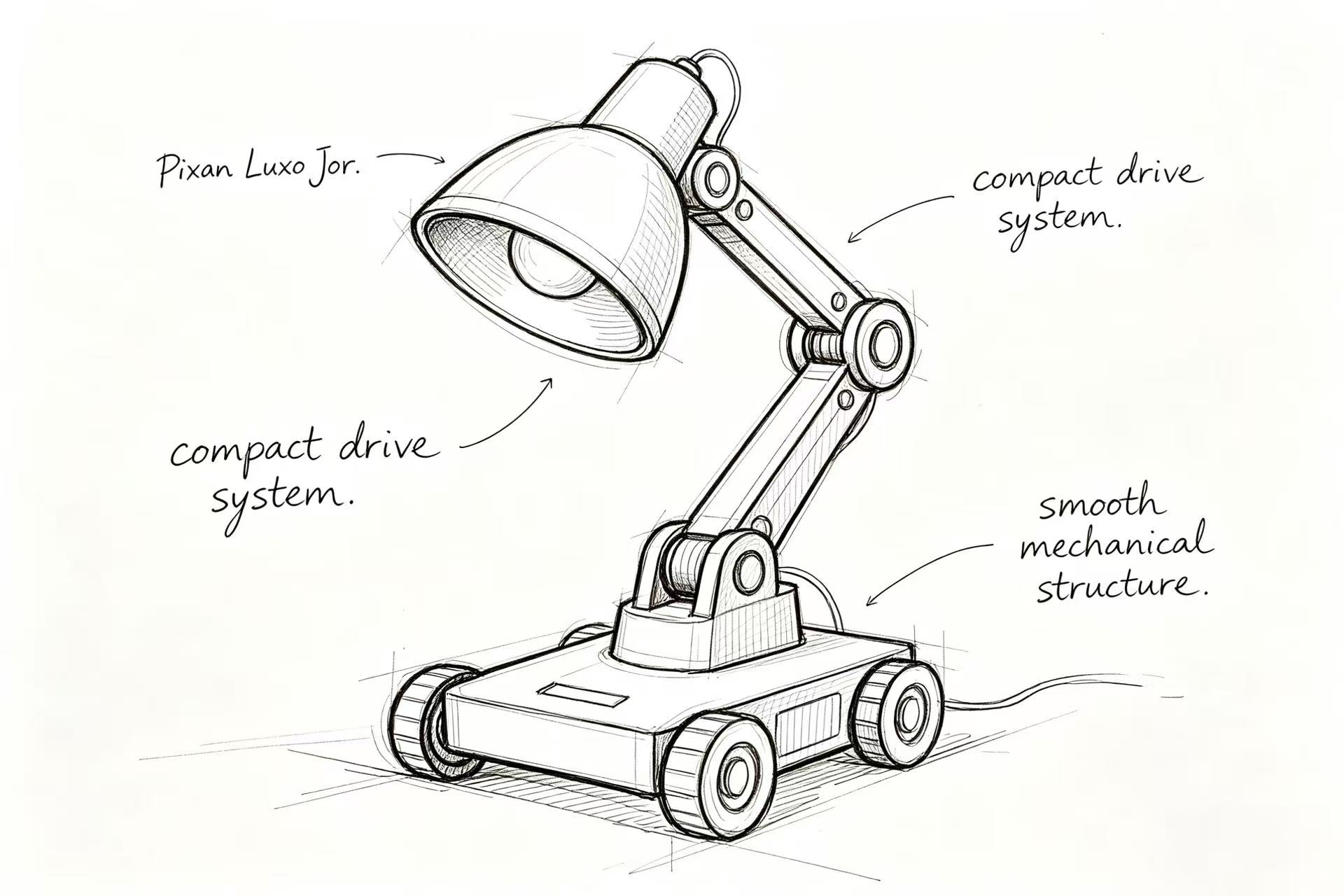
Concept
An autonomous desktop robot inspired by Pixar’s Luxo Jr. It combines lifelike movement with voice interaction to serve as a smart assistant and alarm clock.
Architecture & features
1. Hardware Architecture
High-Level Controller
Raspberry Pi running ROS 2 for AI inference, computer vision, and system logic.
Low-Level Controller
STM32 / Arduino for real-time motor control and sensor processing.
Chassis
Based on the sophicar.com open-source design for agile, precise tabletop mobility.
Peripherals
Camera (face tracking), microphone array, and LED feedback systems.
2. Software Stack
Voice AI
- SenseVoice (ASR), LLMs (Qwen / Kimi), and CosyVoice (TTS).
Navigation
ROS 2-based SLAM, obstacle avoidance, and Gazebo simulation.
Intelligence
I will use AI models to adapt interaction modalities.
3. Key Functions
- Smart Assistant: voice-activated scheduling and interactive alarm clock.
- Dynamic Movement: autonomous cruising and person-following.
- Interaction Design (in progress): potential interaction forms are under analysis and discussion to determine the most intuitive user experience.
- Operational Modes: manual remote control, automatic patrolling, and guided presentation modes.
Development Timeline
Week 1-5
Concept Development & Initial Design
Week 6-10
Prototyping & Testing
Week 11-15
Electronics & Programming
Week 16-18
Integration & Refinement
Week 19-20
Final Assembly & Presentation