
System Integration, Testing and Final Prototype
This stage focused on transforming the project from a collection of independent subsystems into a fully integrated interactive object. The mechanical structure, embedded electronics, interaction system, power distribution, and enclosure design were progressively assembled and tested together as a single kinetic system.
Unlike previous development stages where components were tested separately, this phase revealed new challenges related to internal space organization, cable routing, structural alignment, movement tolerances, and accessibility during assembly.
A. Integration and Iterative Development
Several redesign iterations were necessary to improve the relationship between the mechanical and electronic subsystems. Small dimensional variations, cable positioning, and component distribution directly affected the reliability of the flower opening mechanism.
The integration process included:
- Internal redistribution of electronic components
- Servo support redesign
- Mechanical spacing adjustments
- Cable routing optimization
- Battery positioning improvements
- Structural reinforcement and alignment corrections
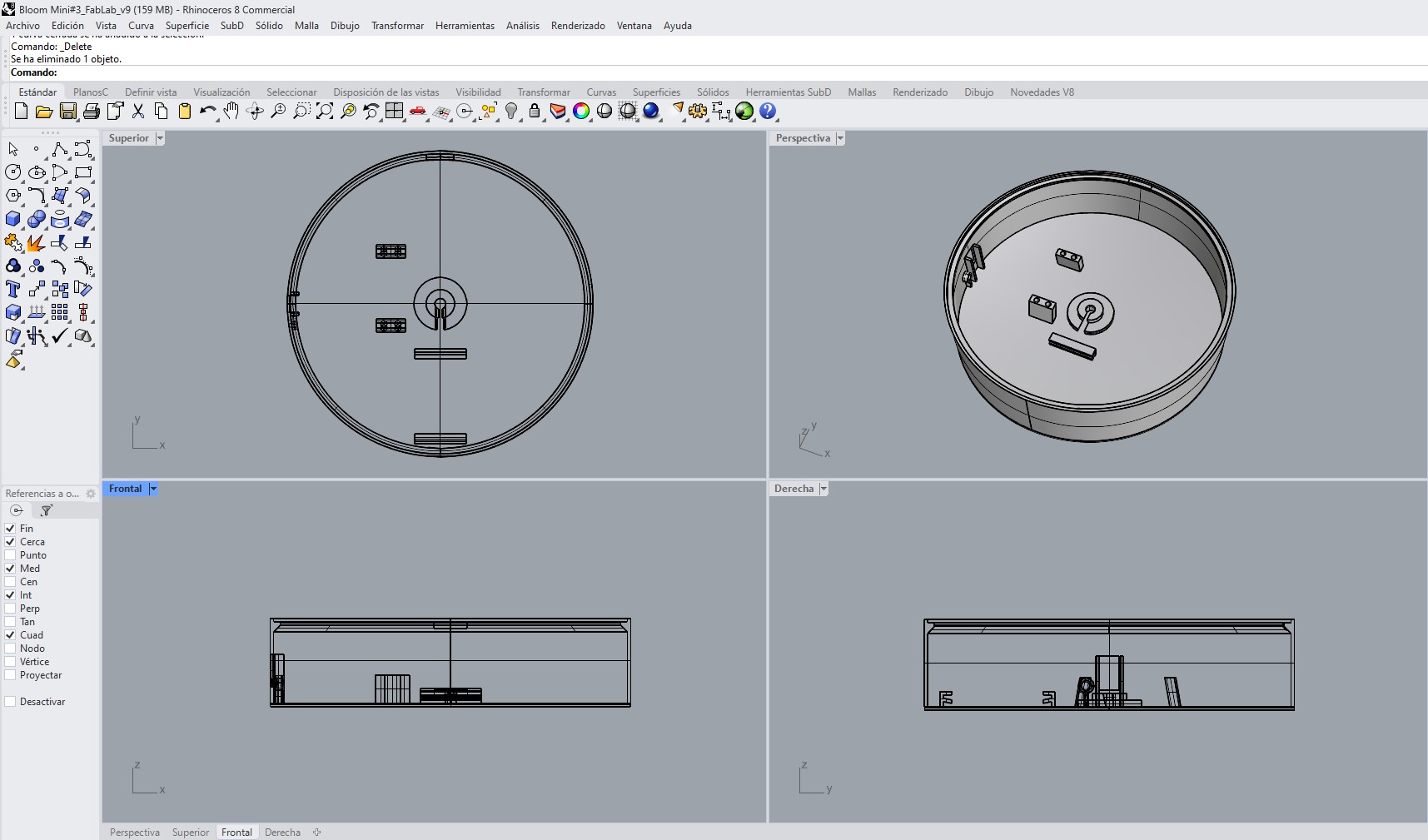 Initial integrated internal layout.
Initial integrated internal layout.
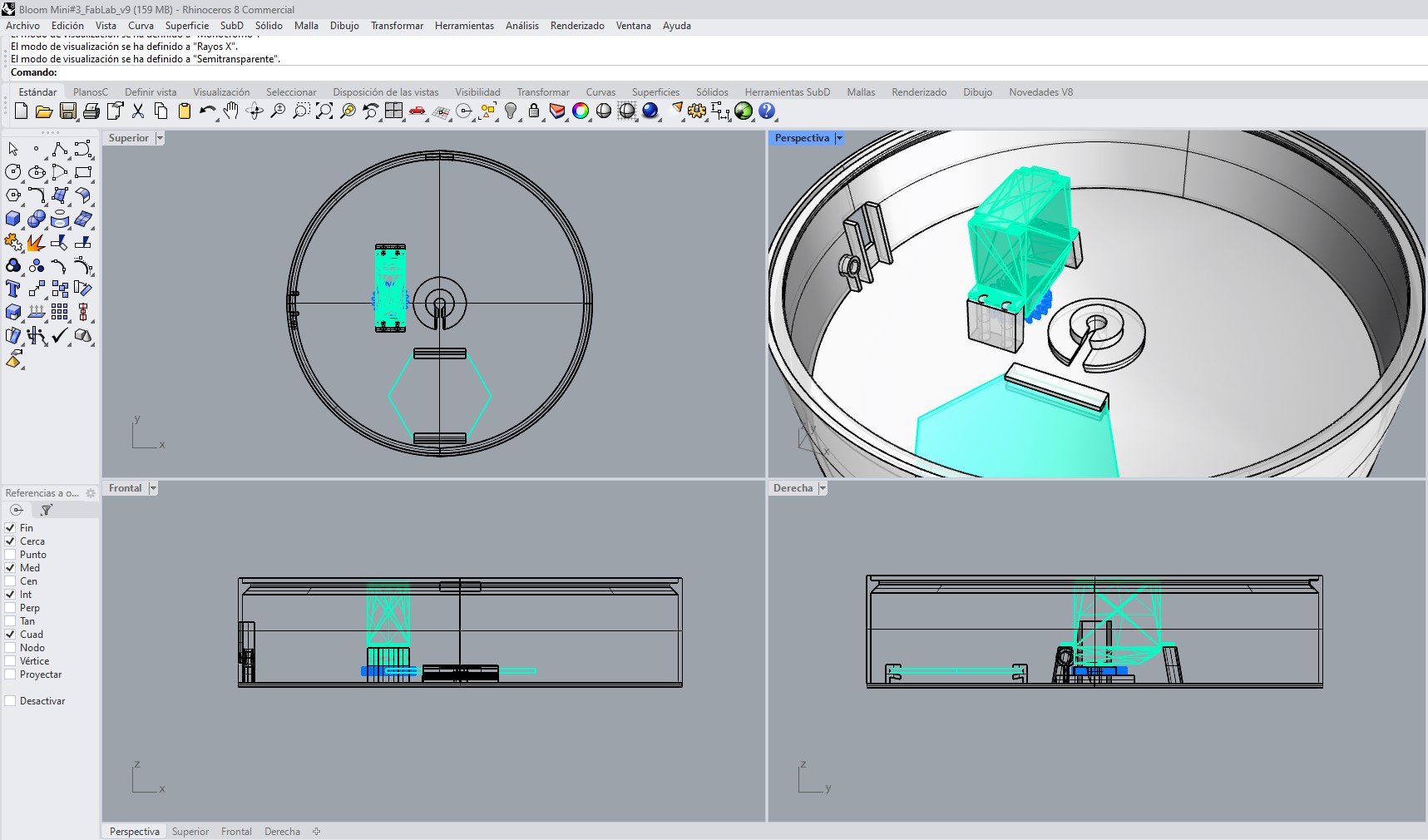 Servo integration and PCB positioning.
Servo integration and PCB positioning.
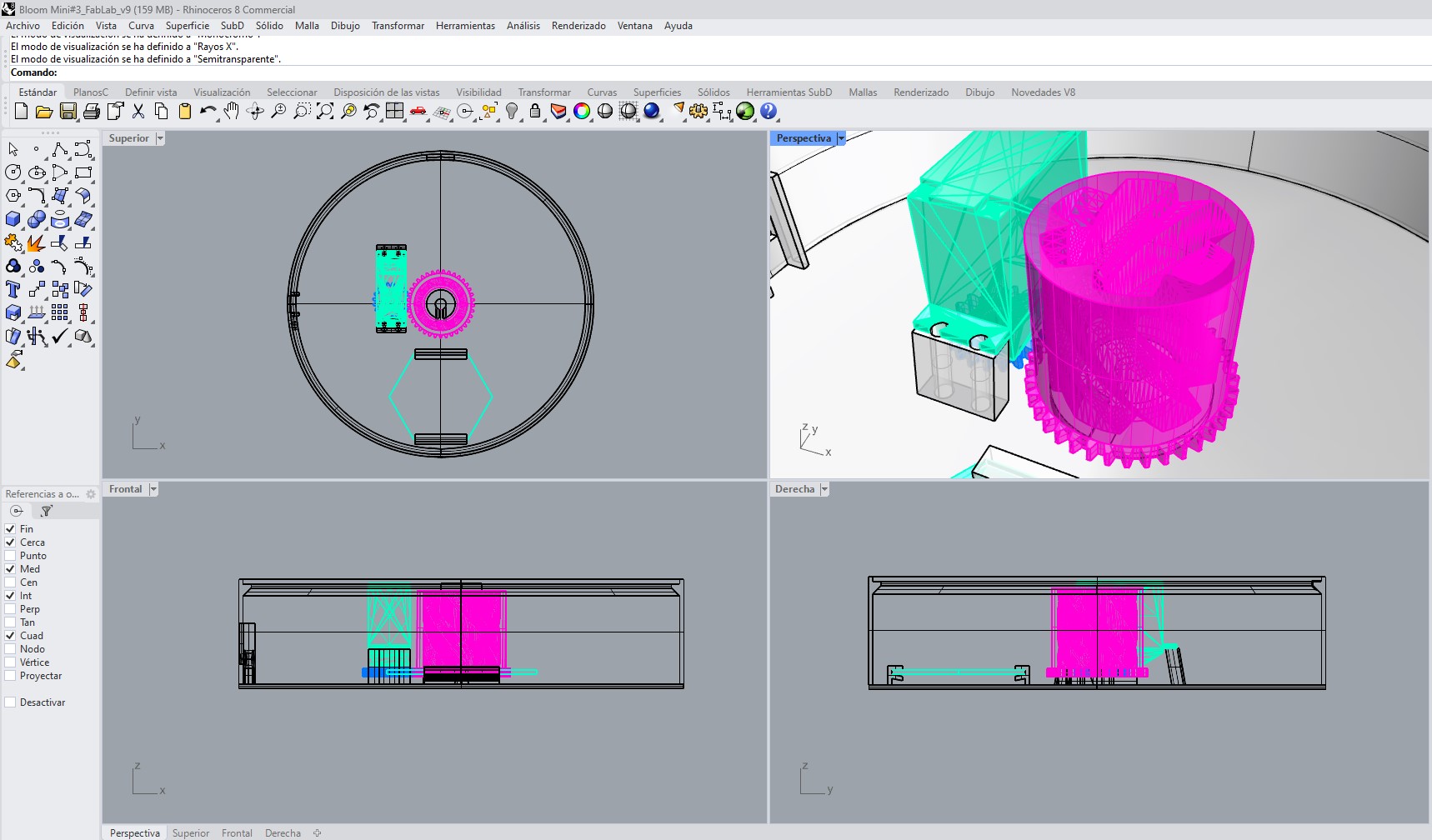 Connection between the servo system and the opening mechanism.
Connection between the servo system and the opening mechanism.
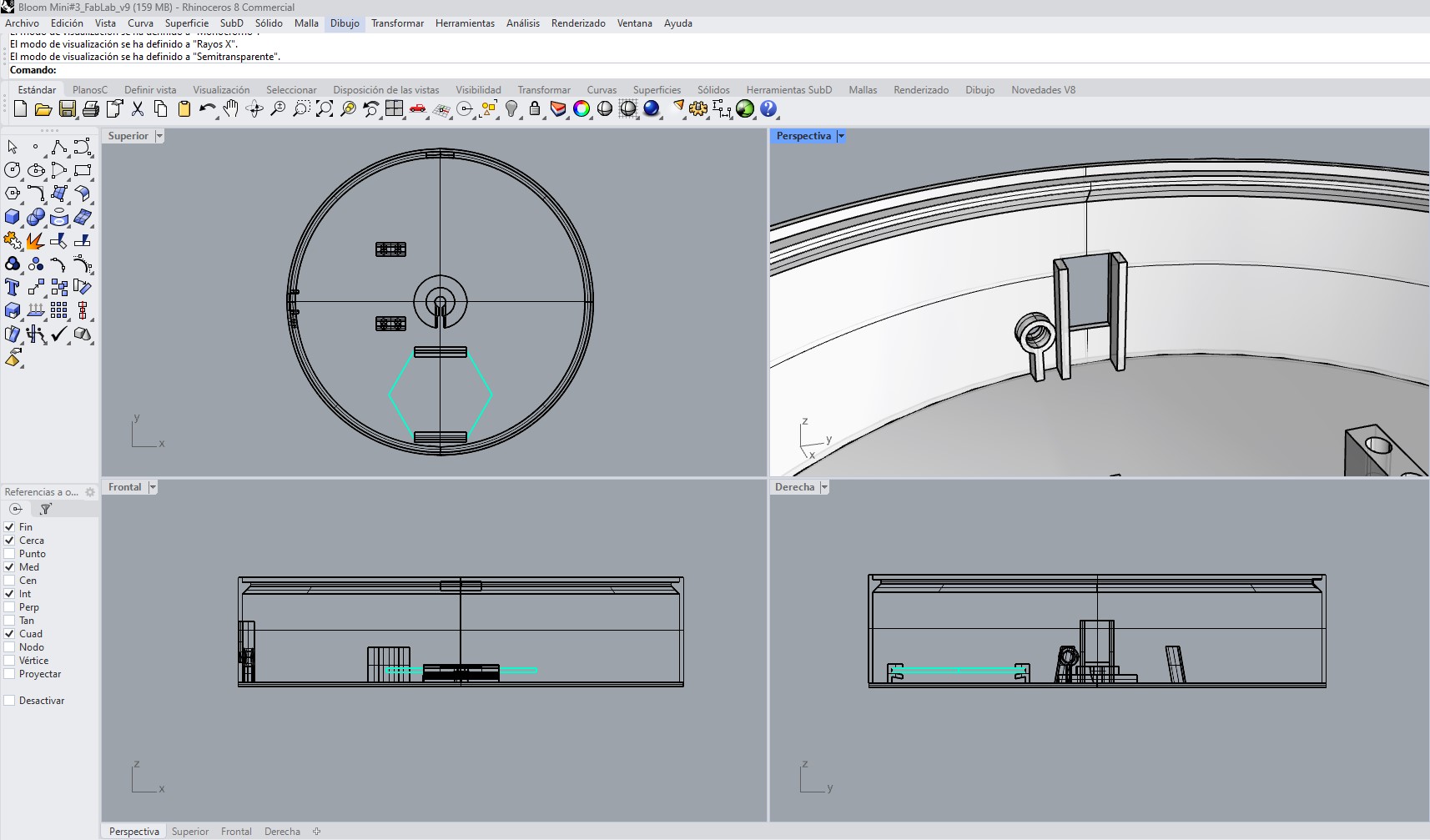 Switch and LED mounting features integrated into the enclosure wall.
Switch and LED mounting features integrated into the enclosure wall.
 Alignment and assembly refinement process.
Alignment and assembly refinement process.
A CAD-based motion simulation was developed to study the opening and closing behavior of the flower. The animation allowed the interaction between the central mechanism and the petals to be evaluated, helping validate the motion concept and identify potential design adjustments before fabrication.
B. System Testing and Validation
Multiple integration tests were performed to validate the complete interaction behavior of the prototype under real operating conditions.
The first tests were conducted with the enclosure open to observe the movement of the mechanism, verify servo response, evaluate sensor behavior, and identify possible interference between moving and static components.
Additional tests were later performed with the enclosure assembled in order to validate the complete interaction sequence and the stability of the integrated system.
The testing process allowed continuous refinement of:
- Servo calibration and movement limits
- PIR sensor response timing
- Mechanical reliability of the opening sequence
- Internal cable organization
- Structural stability and alignment
- Battery integration and accessibility
C. Final Integrated Prototype
The final prototype successfully integrates digital fabrication, embedded electronics, programming, interaction design, mechanical actuation, and portable power into a single autonomous kinetic object.
The system detects user presence through a PIR sensor and responds by activating the flower opening mechanism using a servo-controlled movement sequence.
This stage validated the complete integration of all developed subsystems into a cohesive interactive prototype capable of autonomous operation.
For a more detailed explanation of the process, you can visit the corresponding assignment pages.
7. Failures and Lessons Learned
The difficulties encountered during the process were not simply failures, but important design decisions that had to be reconsidered throughout the development of the project.
- The cable-based system did not provide enough control or stability for the movement.
- Thin printed parts failed structurally under repeated mechanical stress.
- The first versions of the mechanism were unnecessarily complex and difficult to assemble.
- System integration introduced new challenges related to internal space, cable routing, and component accessibility.
- Mechanical tolerances and small dimensional variations significantly affected the quality and reliability of the movement.
- Battery integration required redesigning the internal organization of the prototype.
- Interaction behavior changed under real operating conditions compared to isolated subsystem testing.
- Assembly logic became as important as functionality itself during the final integration stage.
What proved most effective throughout the process was:
- Simplifying the mechanism whenever possible.
- Rapid prototyping, especially by testing ideas first in cardboard.
- Using real references to better understand natural movement.
- Designing motion through geometry rather than relying on flexible elements.
- Iterative testing and continuous refinement during system integration.
- Considering electronics, mechanics, structure, and packaging simultaneously instead of independently.
- Improving internal organization to facilitate assembly, maintenance, and reliability.
Project Timeline (20 Days of may)
The final phase of the project includes design refinement, fabrication, system integration, and documentation. Additional work was required to complete the petal fabrication and shaping process.
| Task | Day 1-4 | Day 5-8 | Day 9-12 | Day 13-16 | Day 17-20 |
|---|---|---|---|---|---|
| Refine petal design | ● | ||||
| Print remaining petals | ● | ● | |||
| Heat-form petals | ● | ||||
| Adjust central mechanism | ● | ||||
| Servo integration | ● | ||||
| Build final structure | ● | ||||
| System validation | ● | ● | |||
| Process documentation | ● | ● | ● | ||
| Final documentation upload | ● |
The workflow includes overlapping stages, especially during fabrication, integration, and validation. Documentation is developed in parallel to ensure a complete and accurate final submission.