Week 17: Applications and Implications: Project Development
Assignment
Plan a final project masterpiece that integrates the range of units covered, answering:
- What will it do?
- Who's done what beforehand?
- What sources will you use?
- What will you design?
- What materials and components will be used?
- Where will they come from?
- How much will they cost?
- What parts and systems will be made?
- What processes will be used?
- What questions need to be answered?
- How will it be evaluated?
Your project should incorporate:
- 2D and 3D design
- Additive and subtractive fabrication processes
- Electronics design and production
- Embedded microcontroller design, interfacing, and programming
- System integration and packaging
Where possible, you should make rather than buy the parts of your project.
Projects can be separate or joint, but need to show individual mastery of the skills and be independently operable.
Q & A
What will it do?
Bagbot is designed to carry a user's belongings and follow them around.
The goal of the project is to reduce the burden of carrying heavy bags and to provide a convenient hands-free transportation solution for students and everyday users.
Who's done what beforehand?
Many autonomous follower robots and smart carts have been developed before but one particular project that inspired me was Mr. Theo Gautier's project that he developed during Fab Academy. Looking through his documentation helped me understand how a robotic follower system could be designed and integrated.
What will you design?
I will use Fusion 360 to design all the parts of my project. The main frame will be CNC cut, the sensor enclosures will be 3D printed, and the electronics box will be made using a laser cutter. I will also design two custom made PCBs (One for my motors and one for all my sensors).
- XIAO ESP32-C3
- Time-of-Flight Sensor
- IR Sensors
- 12V Johnson Motors
- 11.1V Li-ion Battery Pack
- Buck Converter
- Plywood
- PLA Filament
- Wheels
Where will they come from?
Most of the materials and electronic components will be sourced from the Fab Lab inventory. Components that are unavailable locally will be purchased through online suppliers such as Amazon and Robu.
How much will they cost?
| Component | Quantity | Unit Price (Nu.) | Total Cost (Nu.) | Purpose |
|---|---|---|---|---|
| XIAO ESP32-C3 | 1 | 1650 | 1650 | Microcontroller of the backpack. |
| HC-SR04 Ultrasonic Sensor | 2 | 190 | 380 | I’ll place one sensor on the left and one on the right to detect obstacles. |
| VL53L1X Time of Flight Sensor | 2 | 1571 | 3142 | I’ll place these in the center. They measure the precise distance between the backpack and objects in front of it to maintain a safe following distance and avoid obstacles. |
| 11.1V (3S) LiPo Battery (2200–3000mAh) | 1 | 530 | 530 | Powers the entire system and provides enough energy for extended operation. |
| LM2596 Buck Converter | 1 | 239 | 239 | Reduces the battery voltage from 11.1V to 5V for components that require 5V. |
| BTS7960B H-Bridge Motor Driver | 2 | 549 | 1098 | Controls the motors smoothly and allows speed control. One driver is required for each motor. |
| Johnson High Torque DC Geared Motor (12V, 300 RPM) | 2 | 477 | 954 | Provides sufficient torque (9.06 kg·cm) to carry loads of up to 8 kg while maintaining good speed. |
| Total Cost | 7993 Nu. | |||
What parts and systems will be made?
Frame: The main frame and structure of BagBot will be designed and fabricated using the CNC machine.
Electronics System: Two custom PCBs wille be designed (one will be the motor controller baord and the other will be the logic board)
Sensor System: Enclosures/mounts will be designed and 3D printed to securely hold the sensors.
Drive System: Motor mounts and wheel placement will be considered to provide stable movement / steering.
Software System: The software will enable:
- Person tracking
- Distance maintenance
- Obstacle detection
- Motor control
- System communication
What processes will be used?
- 2D Design
- 3D CAD Modelling
- Laser Cutting
- CNC Milling
- 3D Printing
- PCB Design
- PCB Milling
- Soldering
- Embedded Programming
- Electronics Testing
- Mechanical Assembly
What questions need to be answered?
- What is the most reliable method for tracking the owner?
- How accurate is the Time-of-Flight sensor in real-world conditions?
- How can obstacle avoidance be implemented smoothly?
- How can the robot remain stable while carrying heavy loads?
- How can battery life be maximized?
- How can the electronics be protected from damage?
How will it be evaluated?
The project will be considered successful if:
- The robot consistently follows the owner.
- It maintains a safe following distance.
- It detects and avoids obstacles.
- It can carry a loaded backpack without losing stability.
- The electronics and software operate reliably.
What tasks have been completed?
- Initial concept development
- Sensor testing
- Time-of-Flight sensor testing
- Motor testing
- PCB design
- PCB fabrication
- PCB soldering
- Chassis design
- Runtime and torque calculations
What tasks remain?
- Final assembly
- Motor integration
- Obstacle avoidance tuning
- Testing and debugging
- Exterior finishing
- Documentation
- Final presentation video
What has worked? What hasn't?
Worked
- The Time-of-Flight sensor provides accurate distance measurements.
- The custom PCB was successfully designed and fabricated.
- Sensor communication works correctly.
- The tracking logic functions as expected.
Hasn't Worked
- Multiple DFPlayers were fried during testing. 😅
- One Time-of-Flight sensor failed during integration. 🤔
- Earlier PCB designs required redesigning.
- Several components had to be changed throughout development.
What questions need to be resolved?
- What is the ideal following distance?
- How much weight can BagBot safely carry?
- What is the best way to mount the sensors?
- How should the battery and electronics be packaged for safety?
- How can obstacle avoidance be made smoother?
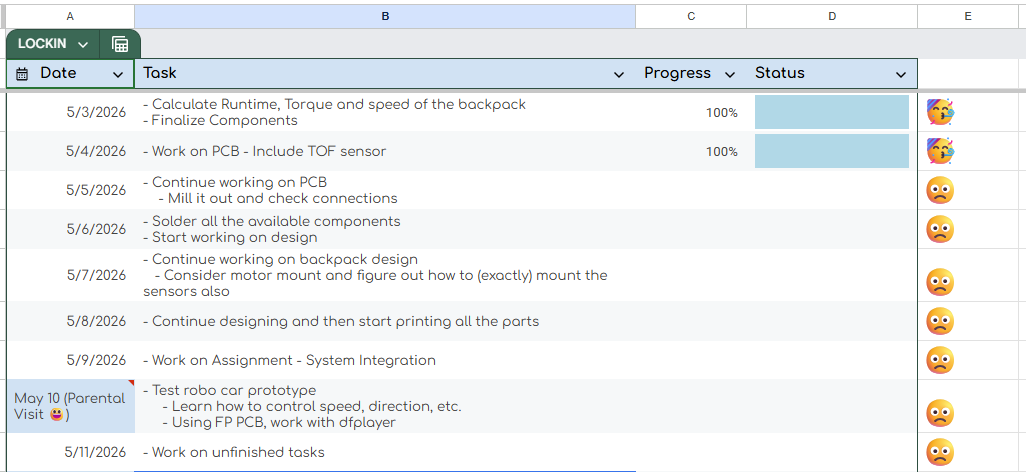
What will happen when?
To manage my time effectively and ensure that all remaining tasks are completed before the final presentation, I have created a project schedule (Hopefully I can keep up with it 🫡).
You can access it here
What have you learned?
I honestly can't believe that Fab Academy is almost over 😭. Over the past few months, I've learned so many new things, from designing in CAD and using digital fabrication machines to making PCBs, programming microcontrollers, and integrating electronics into real projects.
One of the biggest lessons I learned is that developing a successful project is not just about making individual parts work. It requires bringing together mechanical design, electronics, and programming into one complete system. Throughout the process, I faced several challenges (like how I had to redesign my PCB about 10 times) but now when I reflect, I feel like these challenges are what make this whole experience truly valuable and rewarding 😉😄.