Final Project Concept
For my final project I am building a serial robotic arm with a modular end effector (starting with a pen; later grippers or other tools). The documented mechanical build matches the assembly log on this site: J0 is turret rotation on a fixed base, driven by a belt from a NEMA 23 on the platen; J1 shoulder uses a NEMA 23 with a planetary gearbox and a closed-loop driver that closes position on the motor encoder; J2 elbow uses a NEMA 17 with its own planetary gearbox. Control is a Raspberry Pi Pico 2 W issuing STEP / DIR / (ENABLE) through a small interface PCB to those drivers, with headers for limit switches and spare GPIO. The sketches and cycloidal section below are earlier design ideas; the hardware I am machining and wiring follows the planetary + belt-base layout unless I note otherwise.
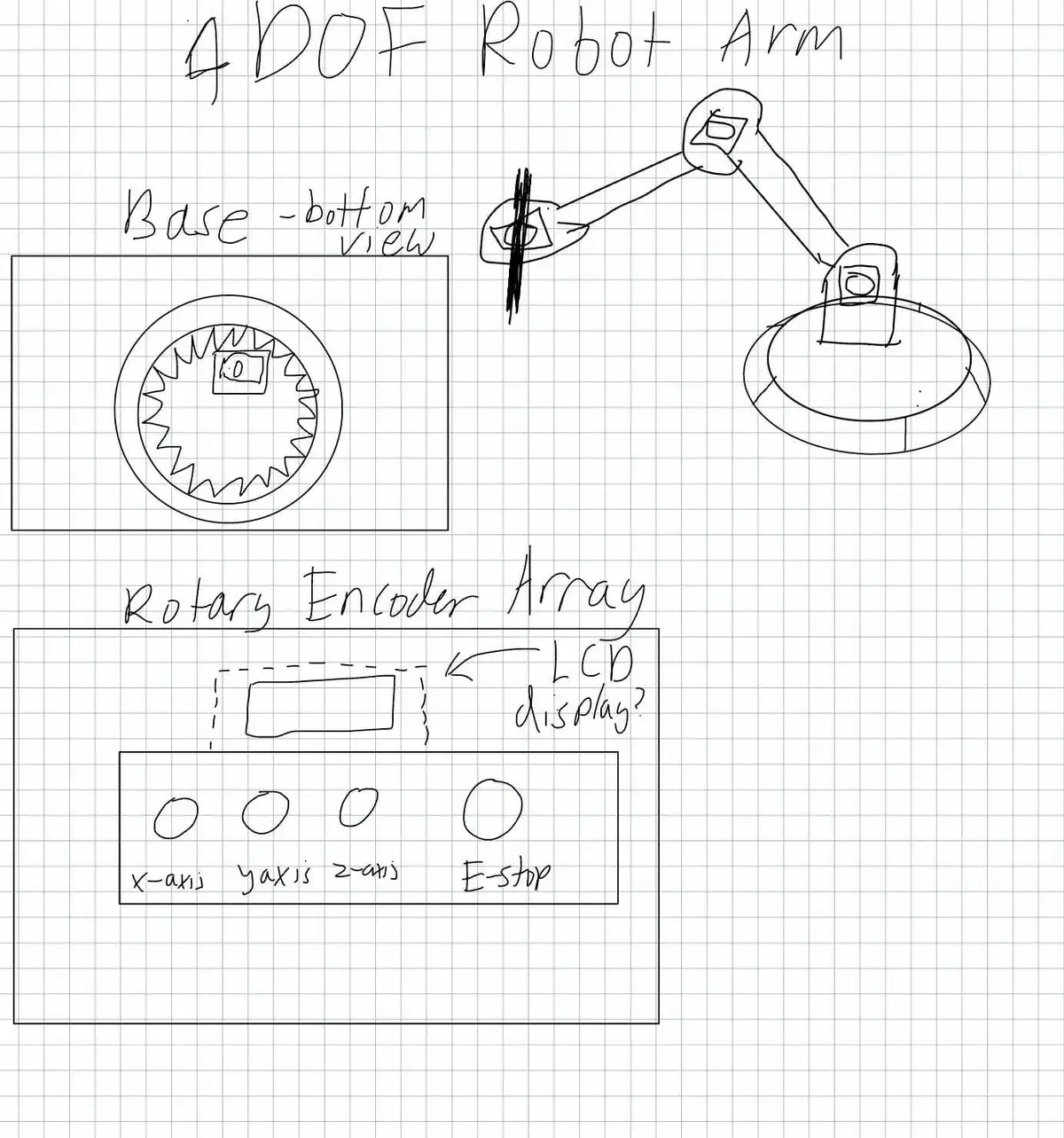
Robot Arm Sketch
The sketch targets four controlled axes in the arm chain (base rotation, shoulder, elbow, plus wrist or tool roll depending on how you count). Operator input can include a potentiometer bank or other knobs to jog or map roughly toward Cartesian motion; motion at the motors is still step pulses from the Pico to the drivers, not direct “X/Y/Z volts” to the joints unless you add inverse kinematics in firmware.
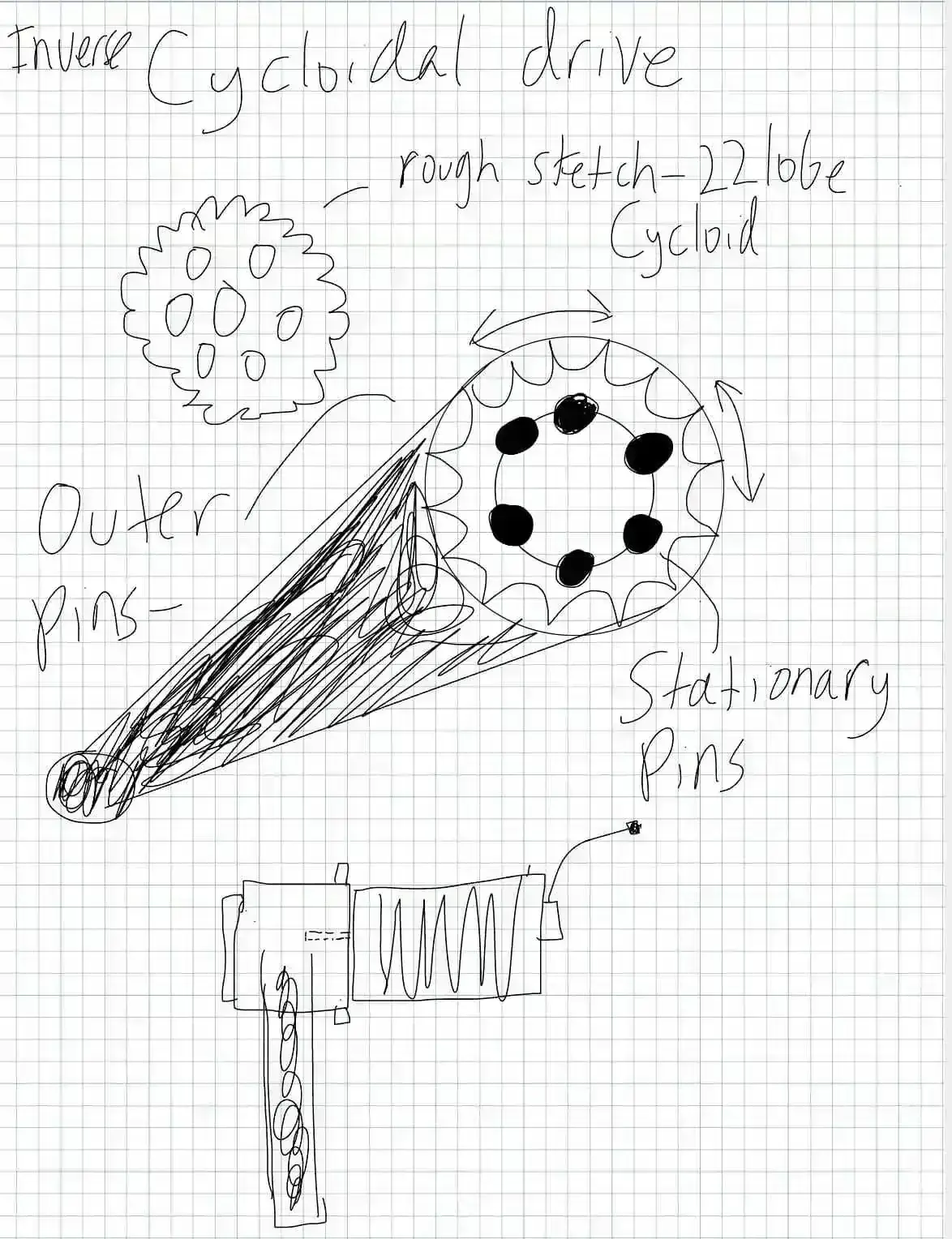
Cycloidal Drive
It will be a 22-1 reduction and it will fit roughly within the shadow of the NEMA 17 stepper. It will be mostly 3d printed, with bearings ordered from amazon.