This week I worked on our group project, which was incredibly frustrating! But nonetheless, we got it to work.
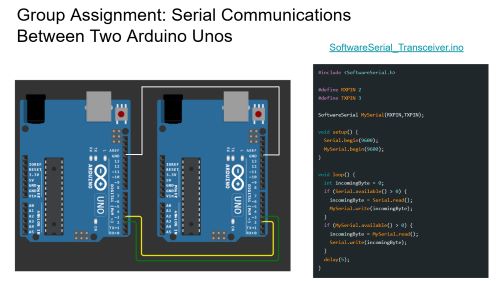
Group Assignment
This week we learned about various different kinds of motors and mechanical components. Below is a brief description of each: Stepper motors are a type of motor that moves in discrete steps. They are commonly used in applications where precise positioning is required, such as 3D printers and CNC machines. Stepper motors work by energizing coils in a specific sequence, which causes the rotor to move in fixed increments. The number of steps per revolution determines the motor's resolution. DC motors are powered by direct current and are widely used in various applications due to their simplicity and efficiency. They work by converting electrical energy into mechanical energy through the interaction of magnetic fields. The speed of a DC motor can be controlled by varying the voltage supplied to it. Servo motors are designed for precise control of angular or linear position, velocity, and acceleration. They are commonly used in robotics, RC vehicles, and industrial automation. A servo motor typically consists of a DC motor, a position sensor, and a control circuit. The control circuit adjusts the motor's position based on feedback from the sensor. Linear actuators are devices that create motion in a straight line, as opposed to the rotational motion of motors. They are often used in applications such as lifting mechanisms, sliding doors, and robotics. Linear actuators can be powered by electric motors, hydraulic systems, or pneumatic systems. Gearboxes are mechanical devices used to increase torque or change the speed of a motor. They work by using a series of gears with different sizes to achieve the desired output. Gearboxes are commonly used in applications where high torque is required, such as industrial machinery and automotive systems.
My Contribution to the Project
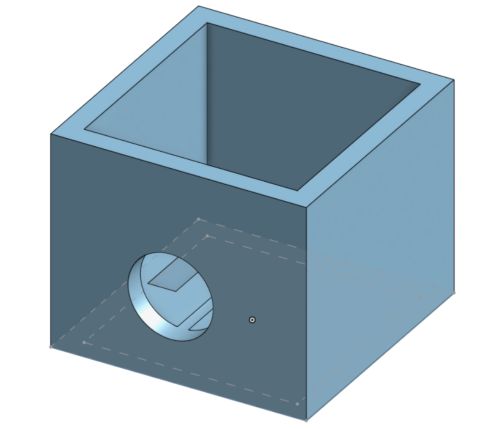
For this project, I worked on the more physical aspects of the project. I designed both the spider, named Fil, after filament, as well as designing a casing for the box which we did not end up using. You can find a link to the Onshape file here. Fil is designed out of pipe cleaners and has two hotglued googly eyes. He is precious.