12. Mechanical Design, Machine Design
Group assignment:
- Design a machine that includes mechanism + actuation + automation + application
- Build the mechanical parts and operate it manually
- Document the group project
Link to a Group page of Machine Design
Individual assignment:
- Document your individual contribution
Summary
As a mechanical design, my task on this group assignment was to design structural parts of the robot. The task was to design a robot with at least 3 axis or degree of freedom. One of our prevoius graduate recommended a robot by BCN3D MOVEO. This is a well designed open source project that suits our needs. The designer of this robot made it open dource; for Commercial use, Private use, Modification and Distribution. Original files can be found here.
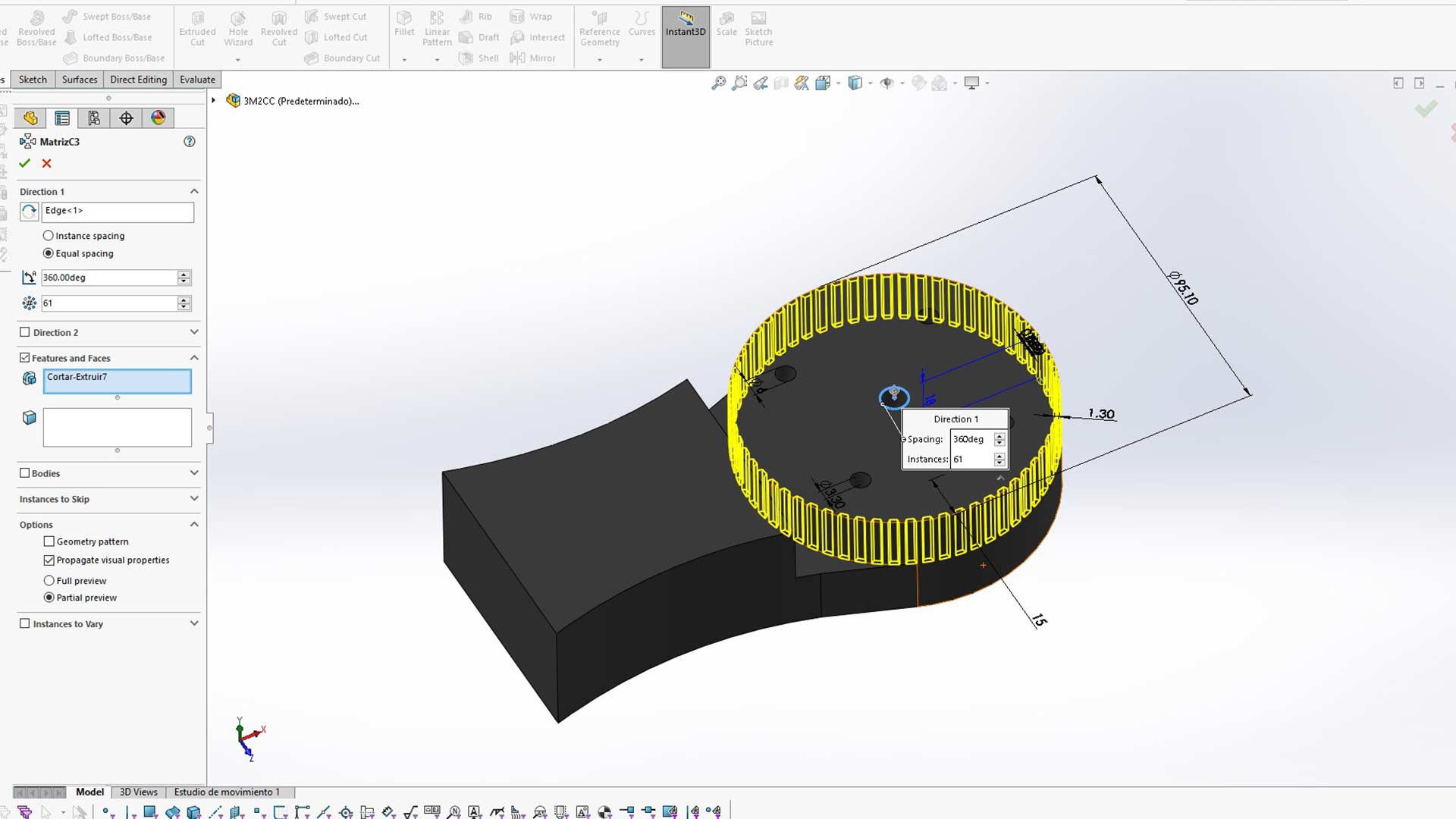
I started by modifying the teeth size of this pulley according to the belt we have which was slightly different to the one they planned to use in original design.
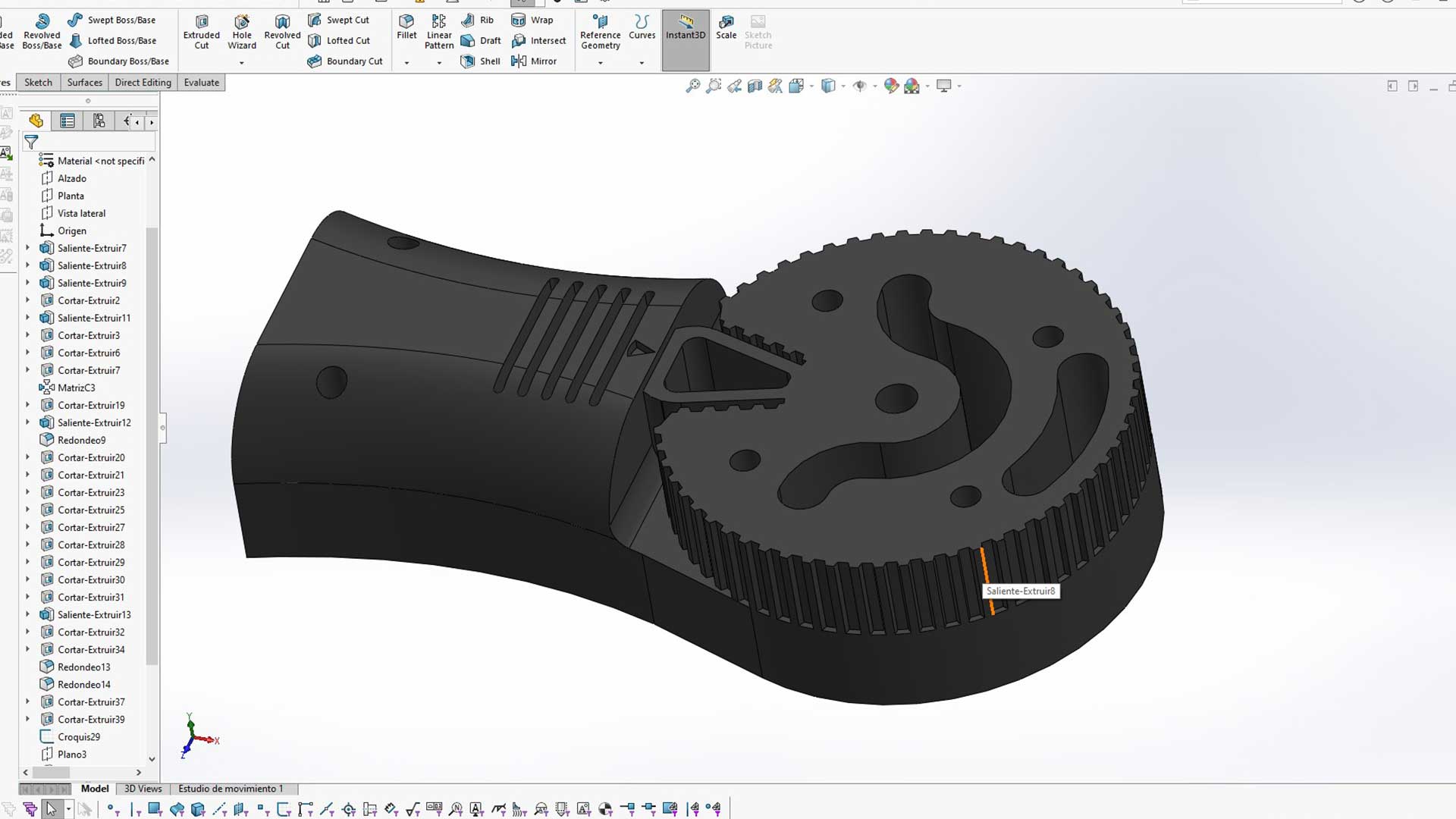
I reduced the number of instance. We printed a its section and checked how teeth will mesh together.
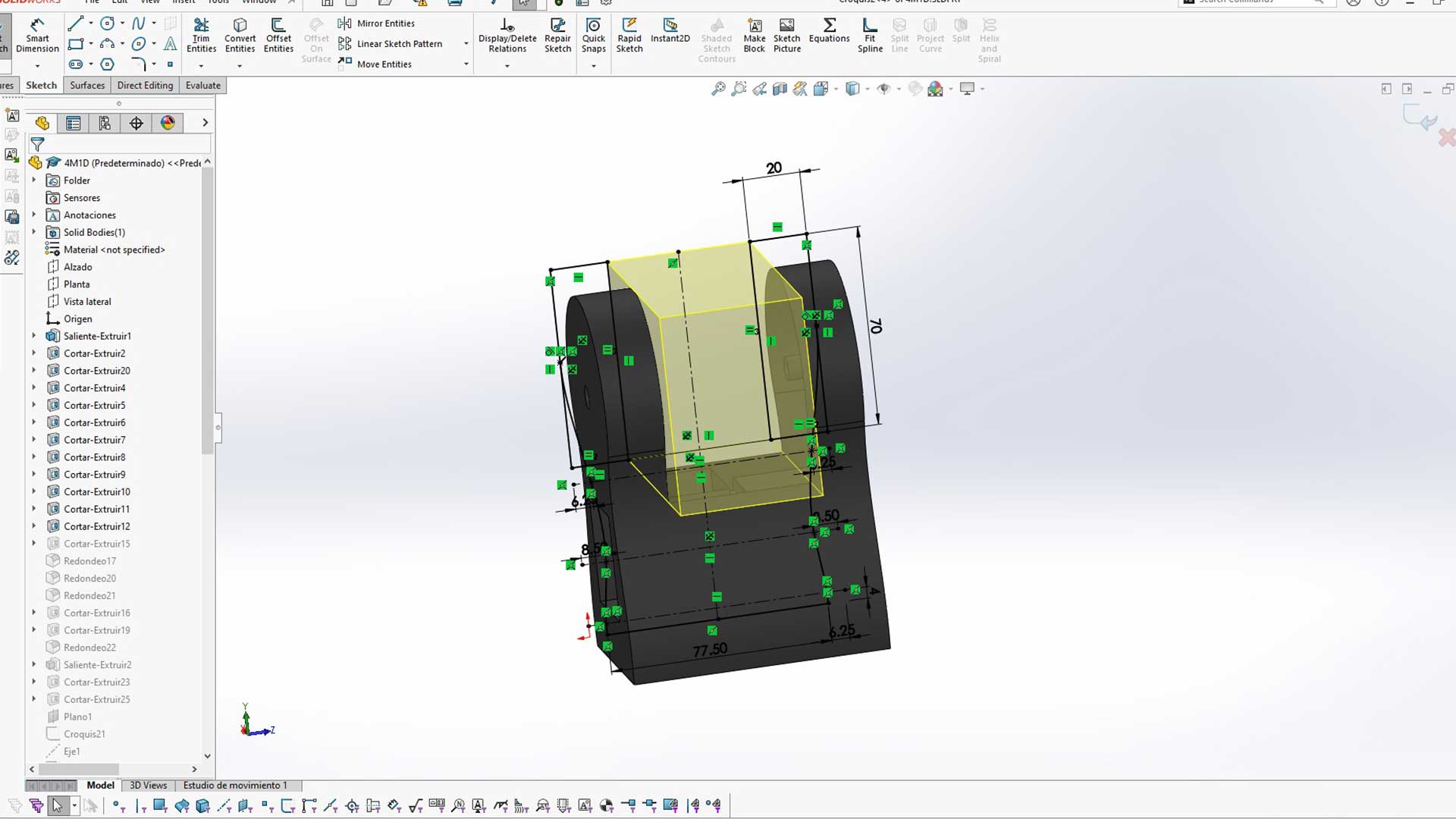
Next, for this rotary, after printing and assembly; is was not strong enough as it hold two stepper motors and other parts. When the robot is powered, it tend to twist. Therefore, I increased the side thichness from 15mm to 20mm.
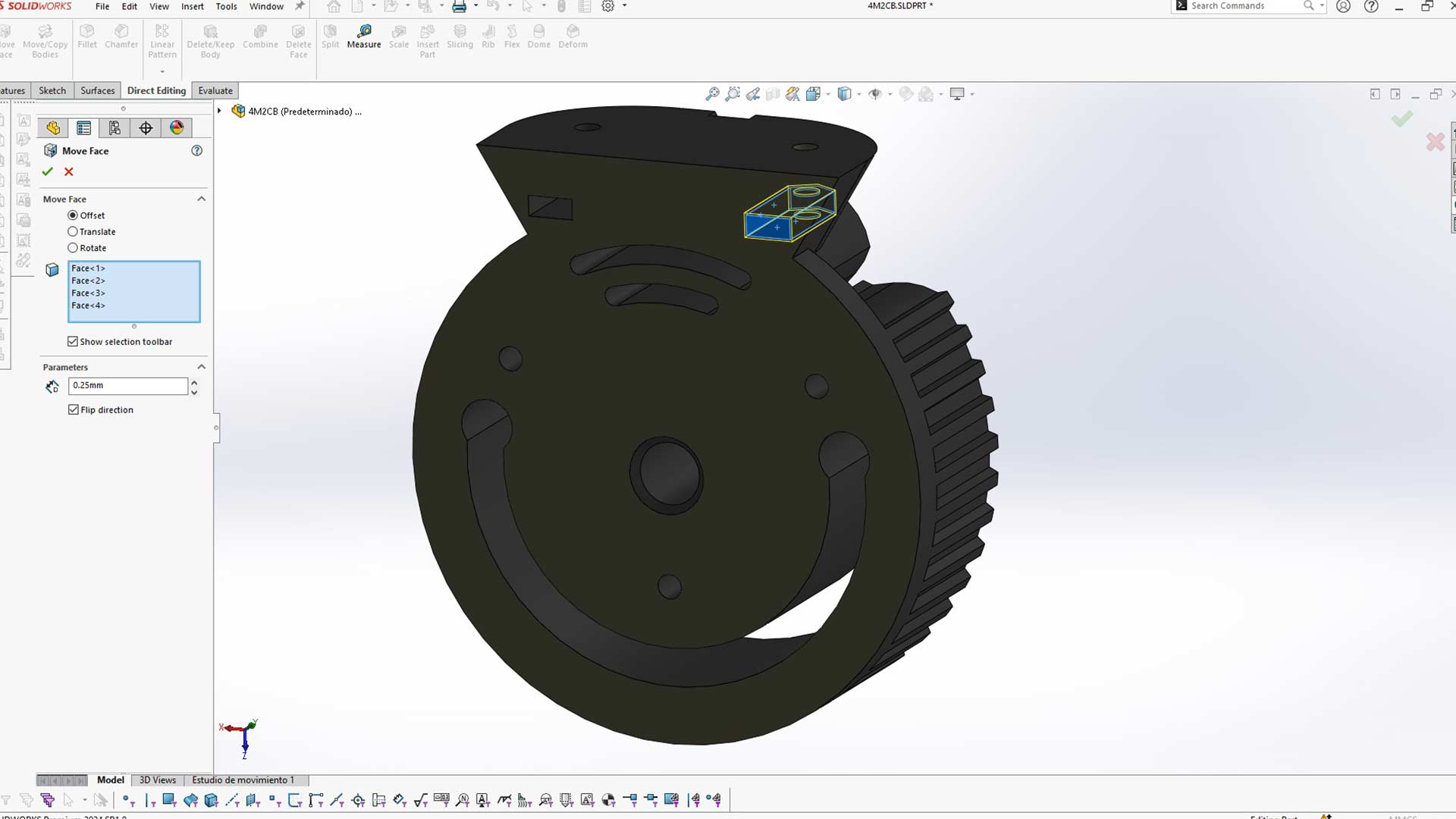
Next phase was to adjust the holes/gaps of bolts and nuts. The original design had m3 while we had m3.5.
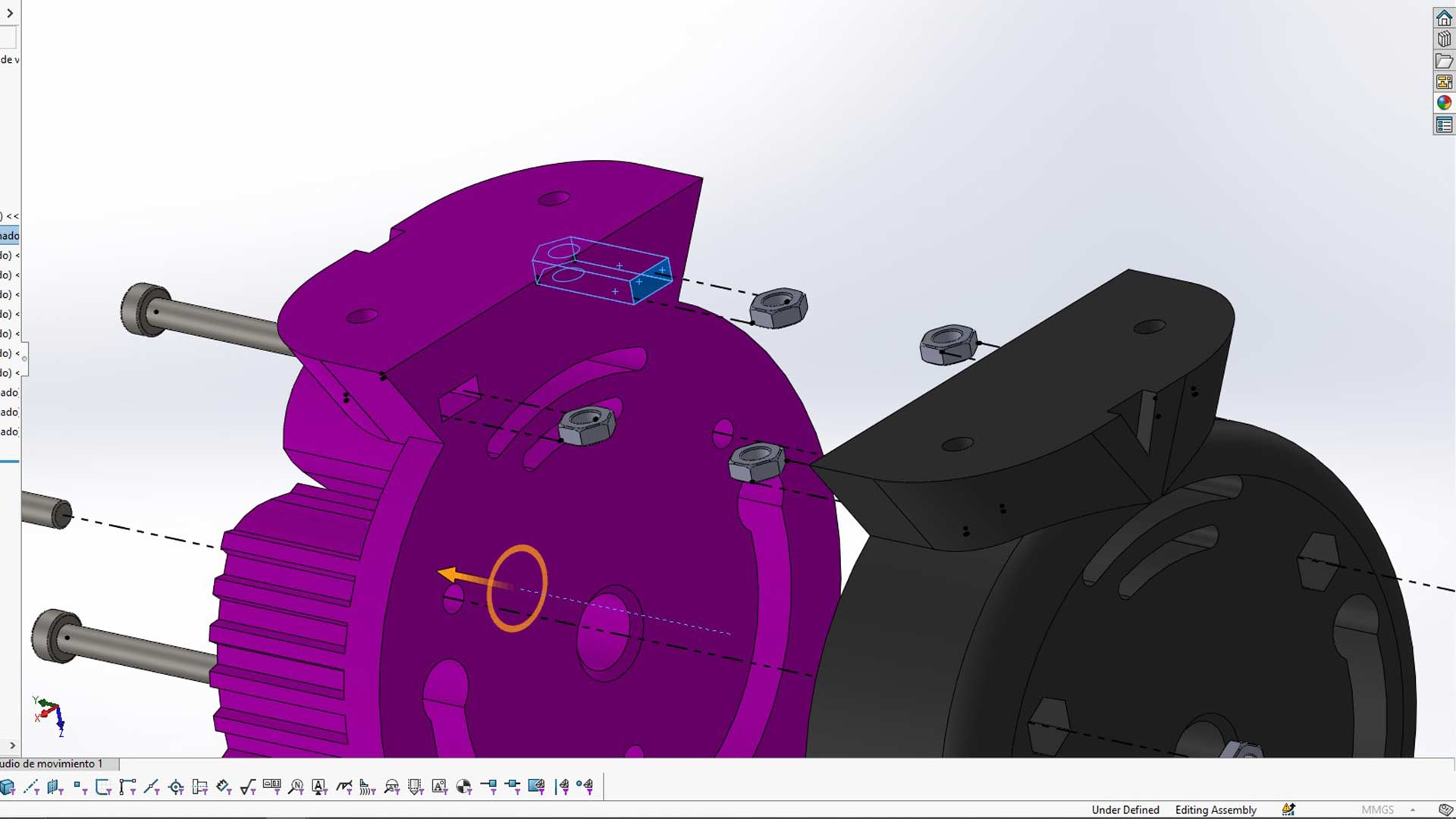
I used SolidWorks move face feature to increase the gap. I also made sure that the clearence was enough since this robot has several parts we used different 3D printers. I have to make sure that all parts' clearence and fitting will be fairly the same.
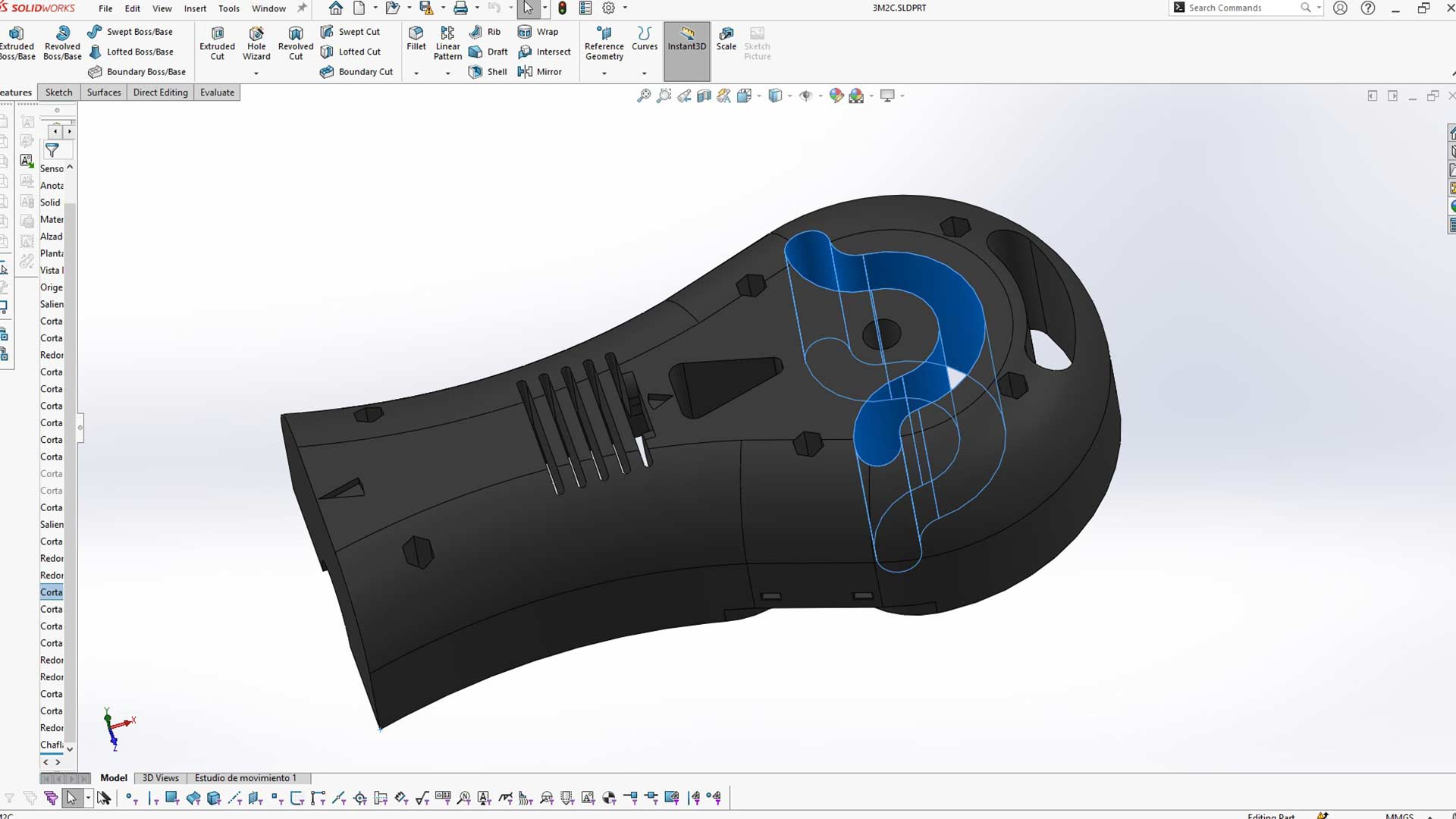
I also increased this gap. Since in the original design, it was very small. To insert the belt was almost imposible. I added 2mm clearence with same method (move face).
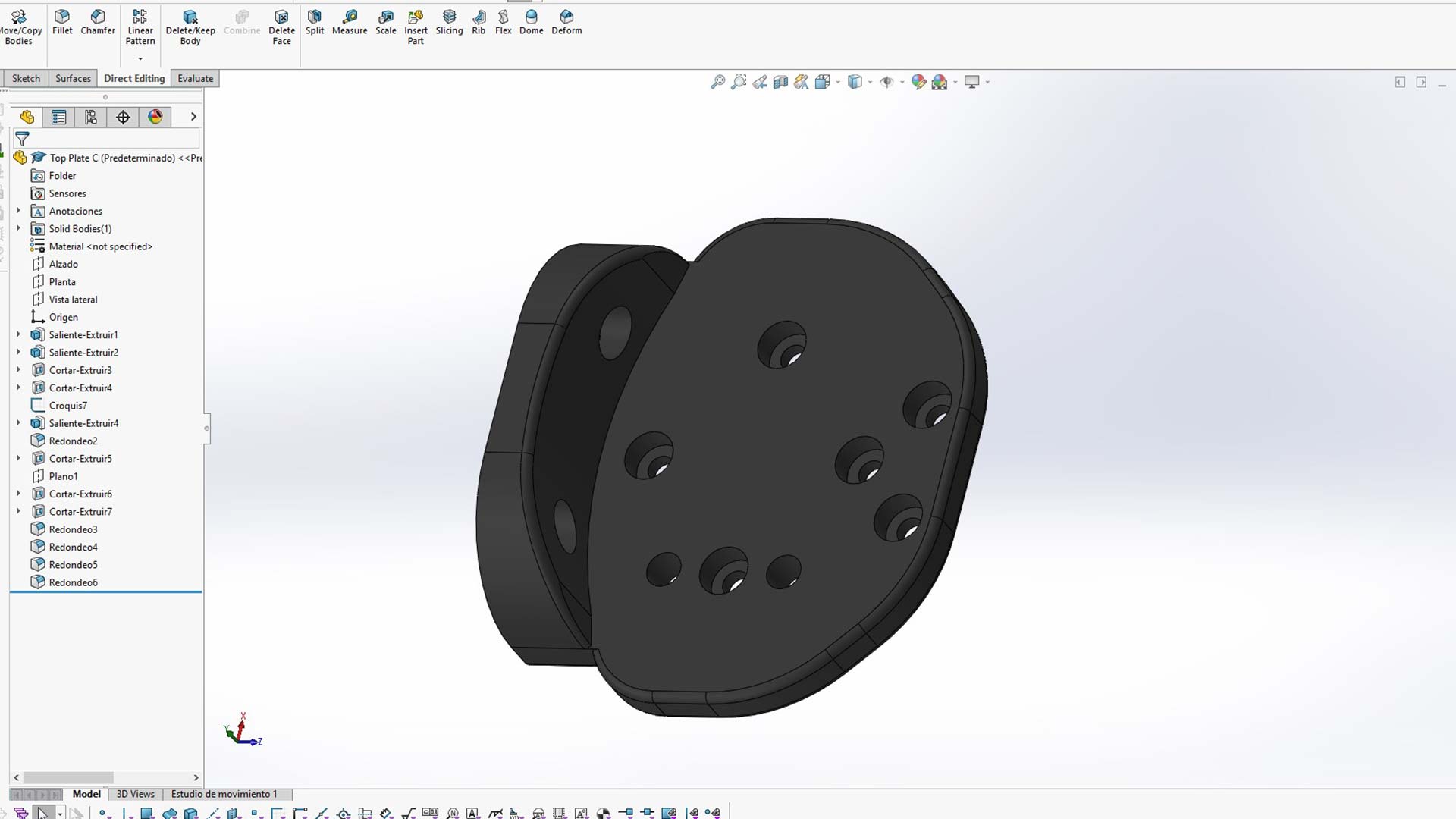
I also modified this motor adaptor. I shanged diameter of all of them since the bolts we have are slighly bigger than those in the original design. 3.0 and 3.5mm respectively.
I then reassembled all modified parts.
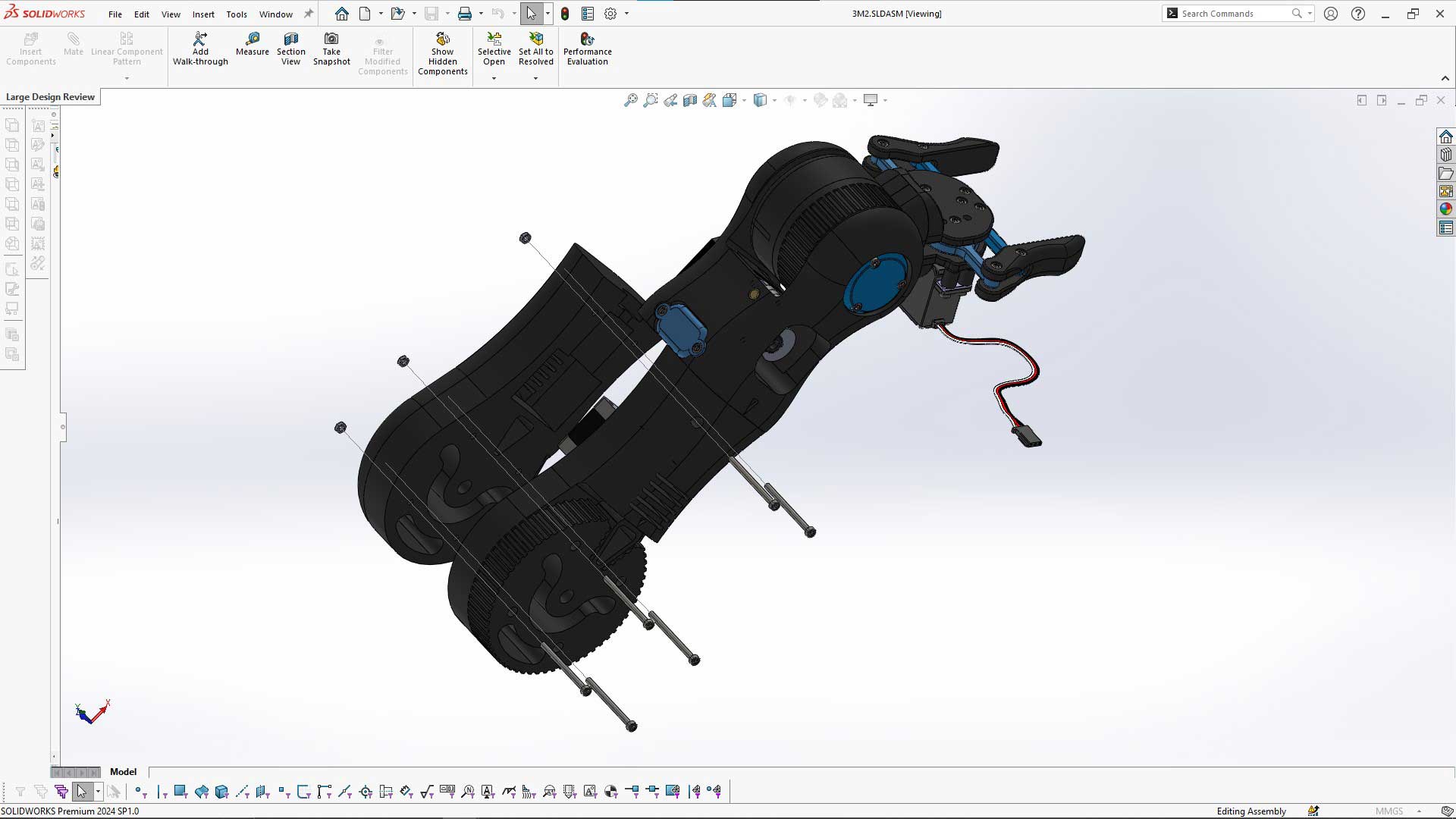
This is the final after modification.
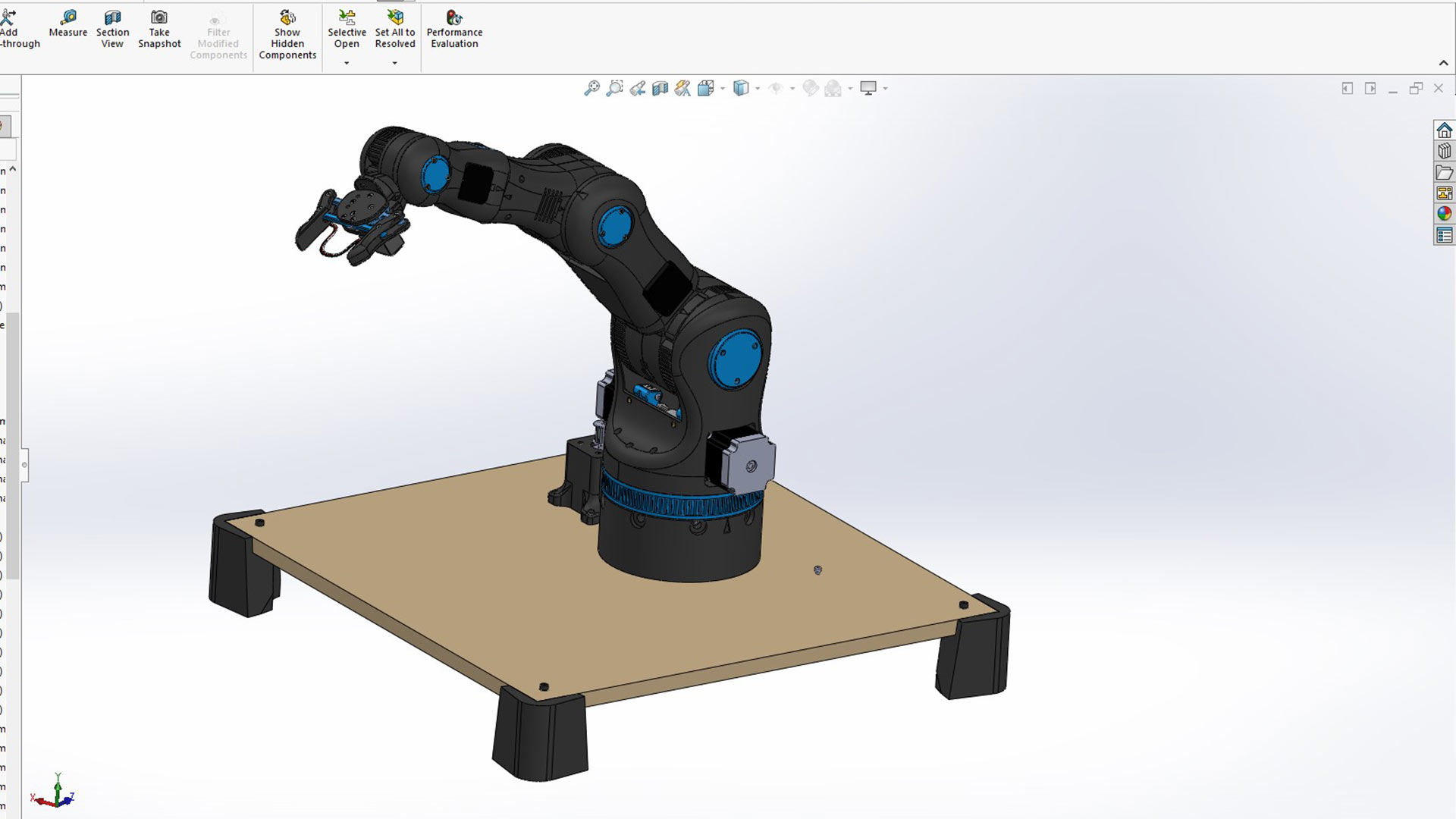
3D printed robot.

Download files
Here are files I used.
SolidWorks design of the robot