Assignment
Propose a final project masterpiece that integrates the range of units covered.
Learning outcomes
- Define the scope of a project
- Develop a project plan including a schedule and a bill of materials (BOM)
- Track the progress of your project
- Summarise and communicate the essence of your project development
Have you answered these questions?
- What will it do?
- Who has done what beforehand?
- What will you design?
- What materials and components will be used?
- Where will they come from?
- How much will they cost?
- What parts and systems will be made?
- What processes will be used?
- What questions need to be answered?
- How will it be evaluated?
- what tasks have been completed?
- what tasks remain?
- what has worked? what hasn't?
- what questions need to be resolved?
- what will happen when?
- what have you learned?
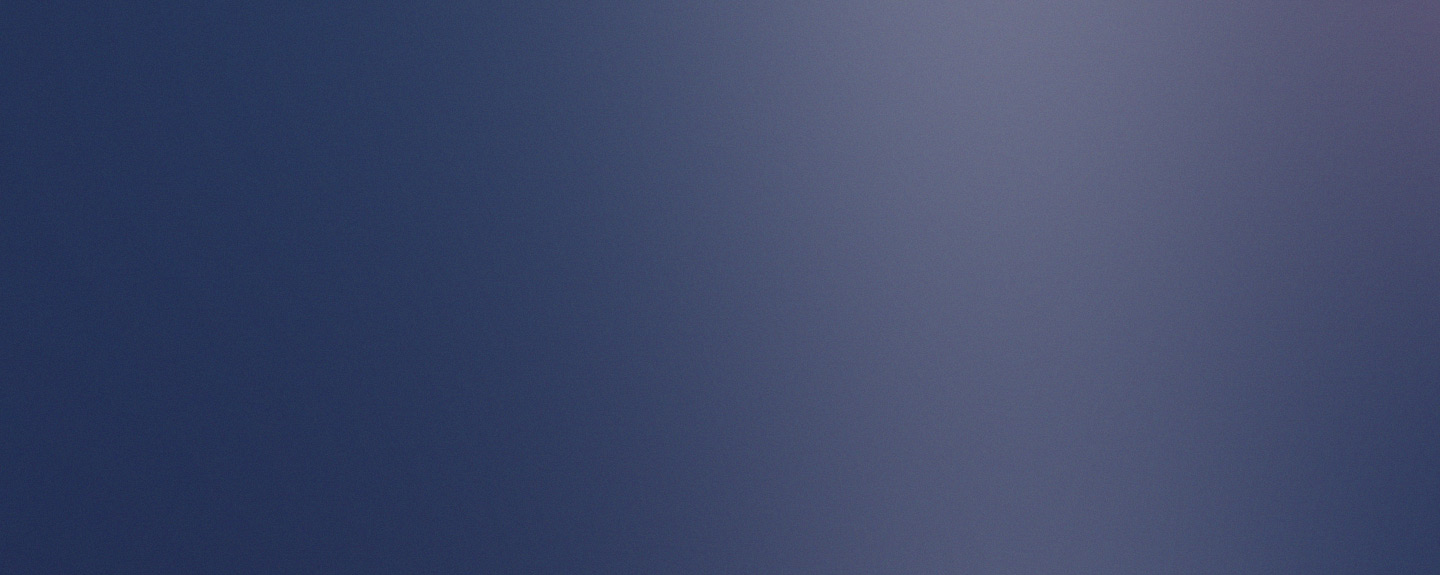
Project Name: Surveillance and Security Robot
What will it do?
The robot will autonomously perform surveillance tasks, such as patrolling an area, detecting suspicious movements or sounds, capturing images or video, and sending real-time alerts. It will be designed to operate indoors in factories, warehouses, or homes, helping to improve environmental security.

Who has done what beforehand?
While this type of robot already exists, SMP Robotics is an American company, a leader in the development of autonomous security solutions, specializing in the manufacture of outdoor surveillance robots. Based in Sausalito, California, SMP Robotics has distinguished itself by integrating advanced artificial intelligence, computer vision, and autonomous navigation technologies into its security systems.

What will you design?
My goal is to design a robot that moves around an environment, performing surveillance and security tasks. It is based on generative design techniques for a robotic structure inspired by the skeleton of an armadillo, which will allow for a significant reduction in the volume and weight of mechanical components compared to traditional designs.
It contains a system controlled by a XIAO ESP 32-C3 microcontroller, fixed to a PCB design. It will perform real-time control and monitoring functions, using sensors and cameras to detect images in dangerous situations and send the information to the user.
What materials and components will be used?
The mechanical structure of the head, chassis, and supports will be 3D printed using PLA filament. A PCB board and various electronic devices will be used for the electronics. A PS4 12V battery will be used for the power component, along with cameras and sensors. Six wheels and six motors will be used for the movement.
Materials
PLA: the sustainable material that replaces plastic in packaging

bolts, nuts and screws
Electronic Components
| Name | Photo | Description |
|---|---|---|
| XIAO ESP32-C3 |  |
Miniature IoT development board based on Espressif's ESP32-C3 chip, featuring Wi-Fi and Bluetooth 5 (BLE). |
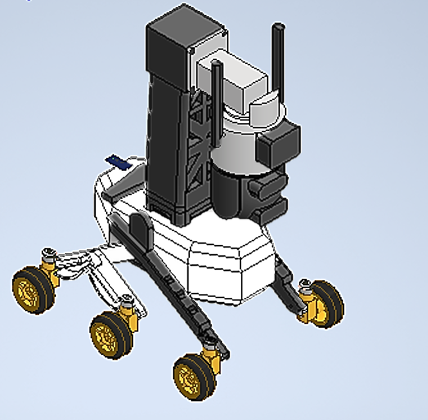
| ROB-14450 | 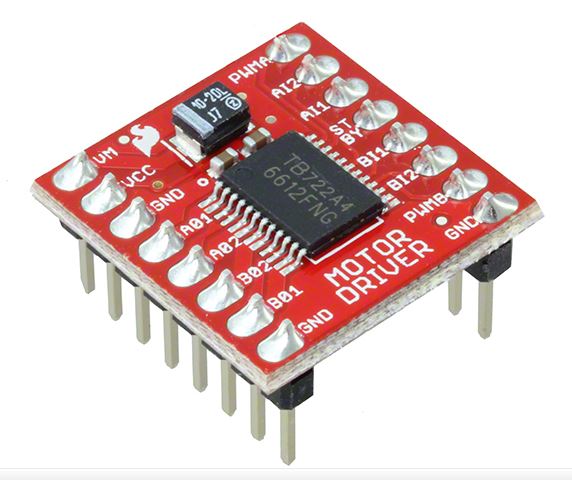 |
Motor driver for controlling two sets of motors using direction and speed control signals. |
| L7805CV |  |
The L7805CV is a three-terminal linear voltage regulator that provides a fixed 5V output. |
| 12V Battery |  |
Rechargeable 12-volt sealed lead-acid (SLA) battery used for powering electronic systems, robotics, and security devices. |
| Polarized Capacitor |  |
Electrolytic capacitor with polarity used for filtering and energy storage in circuits. |
| Ultrasonic Sensor | 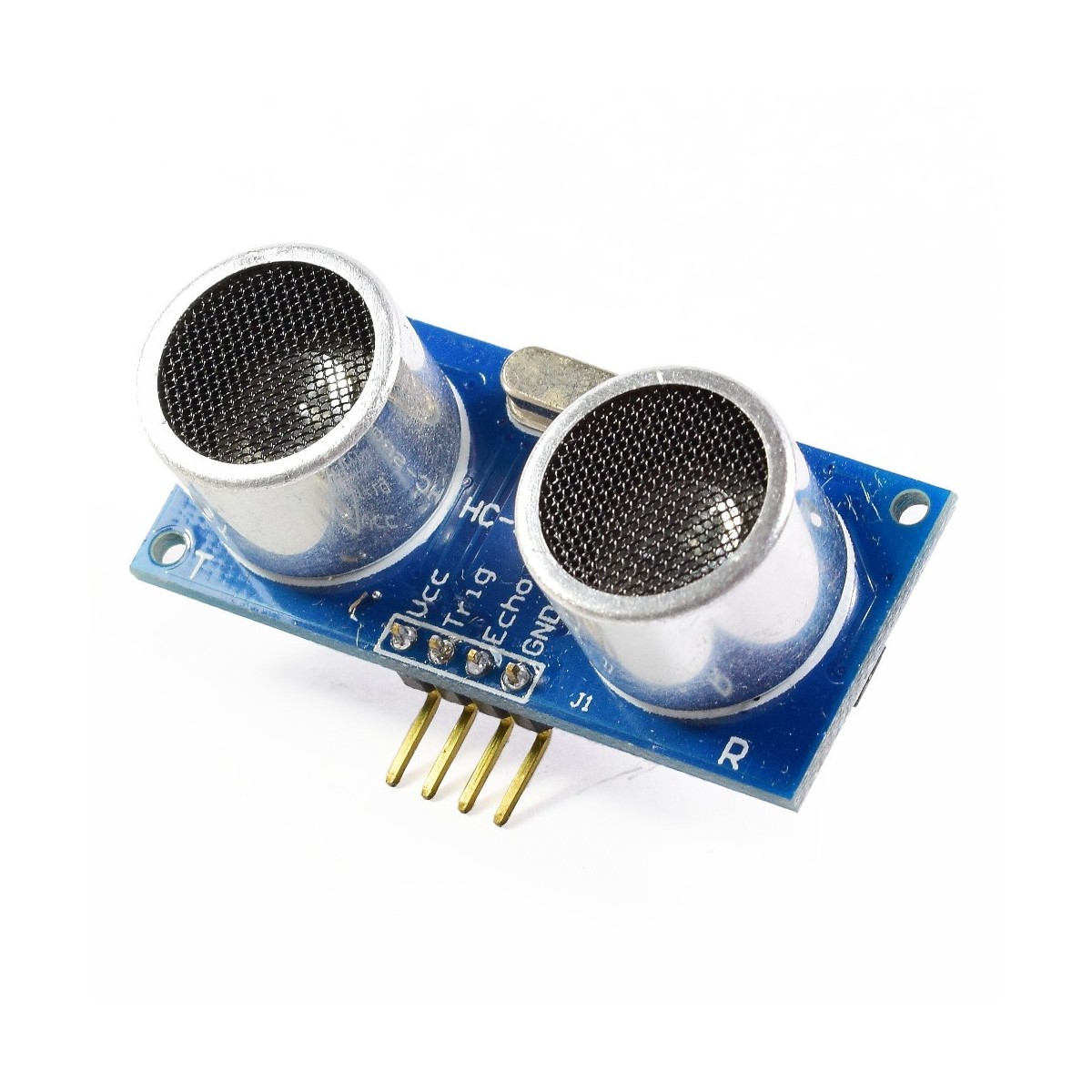 |
Sensor that measures distance using ultrasonic waves; commonly used for obstacle detection. |
| Servomotor (SG90) |  |
Small servo motor capable of precise angular control, often used in robotics. |
| WS2812B LED Strip | Individually addressable RGB LED strip controlled by a single data line with built-in protection diode. | |
| 12V Gear Motor | DC gear motor that operates at 12V, used for driving robotic wheels with increased torque. | |
| Wheel 84mm |  |
Robot wheel with 84mm diameter and rubber tire. Provides ground traction for mobile platforms. Weight: 38.9g. |
| Dual-Lens IP Camera |  |
High-resolution IP surveillance camera with dual lenses for wide-angle and zoom monitoring. Ideal for autonomous security systems. |
Where will they come from?
Most of the parts and components will be ordered online from various websites. As for the chassis material, colored PLA will be purchased from SAISAC Mecatronica, a supplier of electronic components and 3D printing materials.
How much will they cost?
| Component | Price (PEN) | Price (USD) |
|---|---|---|
| XIAO ESP32-C3 | S/. 35.00 | $9.00 |
| ROB-14450 | S/. 25.00 | $6.50 |
| L7805CV | S/. 1.50 | $0.40 |
| 12V Battery (3Ah) | S/. 60.00 | $15.80 |
| Polarized Capacitor | S/. 3.30 | $0.90 |
| Ultrasonic Sensor HC-SR04 | S/. 15.00 | $4.00 |
| Servomotor SG90 | S/. 12.00 | $3.20 |
| WS2812B LED | S/. 40.00 | $10.50 |
| 12V Gear Motor (x6) | S/. 72.00 | $19.20 |
| Wheel 84mm (x6) | S/. 90.00 | $24.00 |
| PLA Filament (1kg) | S/. 85.00 | $22.40 | Dual-Lens IP Camera | S/. 300.00 | $79.00 |
| Total | S/. 839.80 | $194.90 |
What parts and systems will be made?
The entire structure of the robot, which consists of the head, chassis, supports, and links, will be manufactured and printed in 3D. For the electronic part, I will manufacture the PCB boards myself using the CNC PCB.
What processes will be used?
- 3D Printing
- PCB Machining
- Electronic Design
- Electronic Production
- Input/Output and Programming
What questions need to be answered?
- What is the robot's main purpose?
- What problems does it solve?
- What are the main components and their functions?
- How does the robot detect intruders or anomalies?
How will it be evaluated?
Our Robot will be evaluated when it fulfills the programmed functions and operations of providing surveillance and security.
what tasks have been completed?
The tasks that have been completed include design, manufacturing, assembly, electronics integration, preliminary testing and final testing (in progress). For better visualization, see below the ZentinelBot project management plan.
Project Management Plan
| Phase | Start Date | End Date | Progress |
|---|---|---|---|
| 1. Concept and Design | Jan 30 | May 15 | 100% |
| 2. Computer-Controlled Cutting | May 19 | May 20 | 100% |
| 3. 3D Printing | May 1 | May 10 | 100% |
| 4. Electronics Design | Feb 26 | March 5 | 100% |
| 5. Electronics Production | March 14 | May 10 | 100% |
| 6. Embedded Programming | Feb 15 | May 8 | 100% |
| 7. Computer-Controlled Machining | May 16 | May 21 | 100% |
| 8. Input Devices | March 23 | April 20 | 100% |
| 9. Output Devices | March 29 | April 27 | 100% |
| 10. System Integration | May 10 | May 30 | 100% |
| 11. Final Testing and Documentation | May 15 | May 30 | 80% |
Legend:
Completed (100%)
In progress (80%)
what tasks remain?
Pending tasks include preliminary tests, correction and final tests.
what has worked? what hasn't?
So far, the robot's movements and displacements have worked, as well as communication via Wi-Fi. Now, it needs better movement in the spaces to carry out surveillance and monitoring of the information.
what questions need to be resolved?
what will happen when?
When the ZentinelBot implementation is complete, the robot will be able to perform autonomous surveillance and security tasks using sensors, motors, and web control, meeting the proposed technological and functional objectives.
Project Progress Monitoring:
To monitor the progress of the ZentinelBot project, the project management tool was used (completed or in progress) using a color code. The phases range from conceptual design and manufacturing to integration and final documentation. Currently, progress is at 80% in the final testing and documentation phase, indicating that the project is in its final stages and on schedule.
what have you learned?
- I learned how to design and prototype a mobile surveillance robot.
- I became familiar with electronic components such as sensors, servomotors, and microcontrollers.
- I understood how to integrate systems like cameras, power supply, and wireless communication.
- I developed skills in PCB design, 3D printing, and laser cutting for building the robot chassis.
- I improved my programming skills for controlling hardware and processing sensor data.
- I learned how to plan, budget, and document a complete robotics project.