Output devices
This week we will work on connecting output devices to the board we previously built.
The assignment was:
Group assignment: measure the power consumption of an output device.
Individual assigment: add an output device to a microcontroller board you've designed, and program it to do something.
Group assignment
Once again for this group assignment we visited the Fab LAb of the Scientific University of the South.
You can see the documentation on the group's web page

what I learned?
Perform a direct measurement with the multimeter and therefore calculate the energy consumption.
View the current waveform with the oscilloscope.
The oscilloscope offers more precise and detailed measurements than multimeters.

Individual assignment
In the previous week I designed and manufactured a PCB board called Crisduino, you can see complete information at electronics design
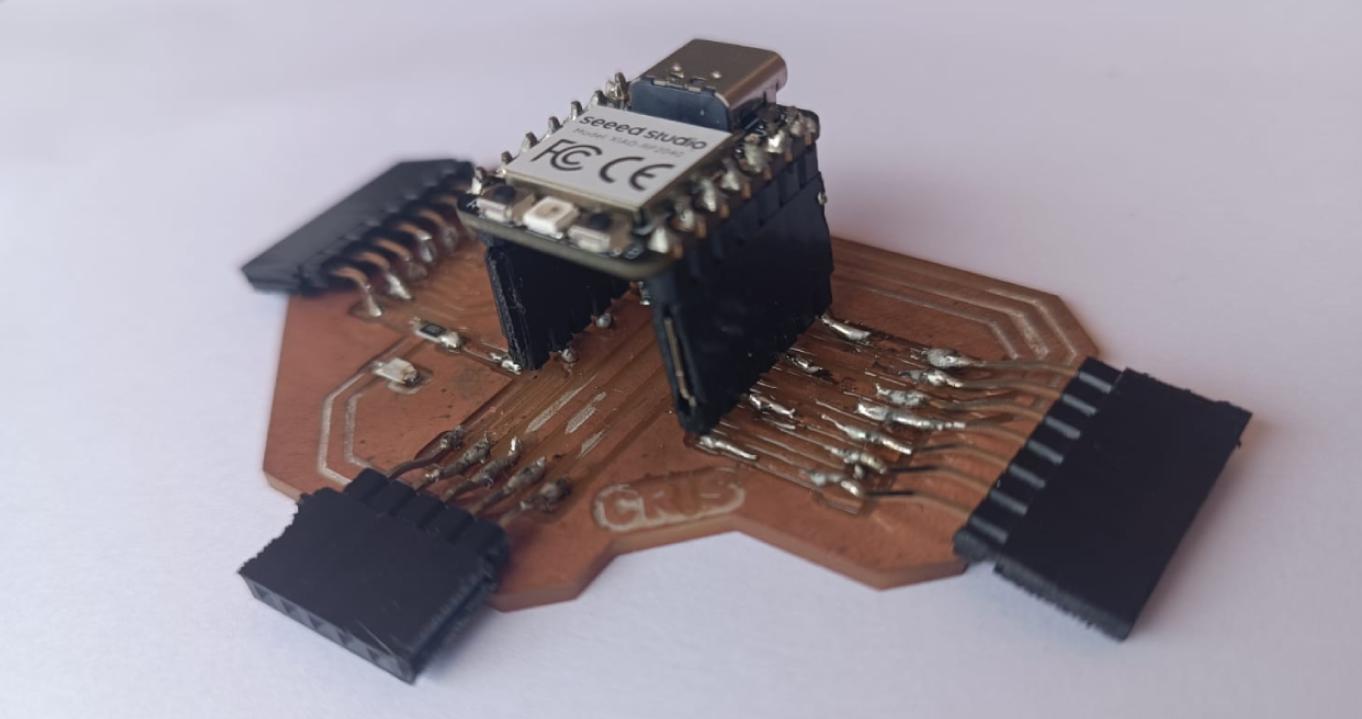
In this assignment we will connect a buzzer to generate audible tones as the Crisduino output device.
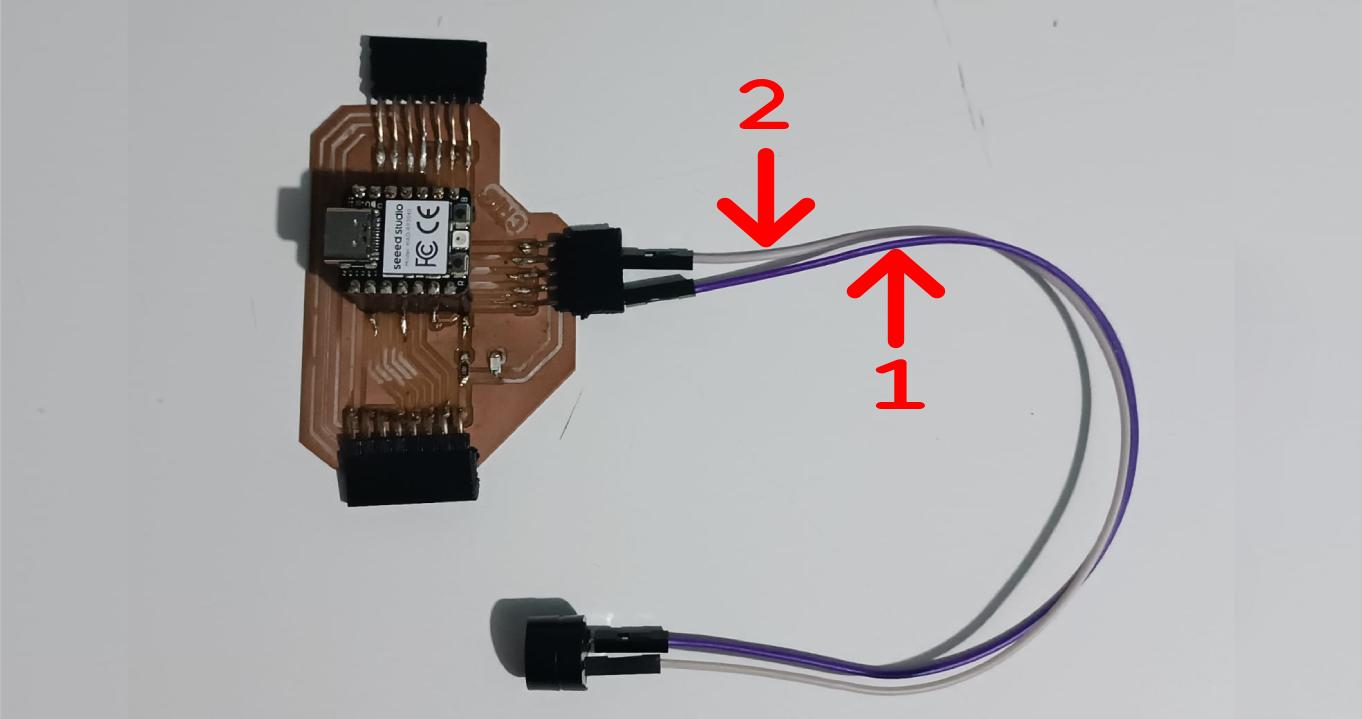
What is a buzzer?...A buzzer is an electromechanical device that produces an audible sound when an electric current is applied to it.

1. We connect the positive side of the buzzer to the GND pin of the Crisduino using the purple cable.
2. We connect the digital signal from the buzzer to pin D4 using the gray cable.
We copy the code of the Imperial March of the Star Wars written by Robson Couto, 2019.
This code implements the Star Wars "Imperial March" melody using a buzzer as an output device to generate the tones.
Notes are defined.
The time and pin of the buzzer are configured.
The melody is defined.
the duration of the note is calculated.
the tone and pause are generated.
/*
Imperial March - Star Wars
credits: Robson Couto, 2019
*/
#define NOTE_B0 31
#define NOTE_C1 33
#define NOTE_CS1 35
#define NOTE_D1 37
#define NOTE_DS1 39
#define NOTE_E1 41
#define NOTE_F1 44
#define NOTE_FS1 46
#define NOTE_G1 49
#define NOTE_GS1 52
#define NOTE_A1 55
#define NOTE_AS1 58
#define NOTE_B1 62
#define NOTE_C2 65
#define NOTE_CS2 69
#define NOTE_D2 73
#define NOTE_DS2 78
#define NOTE_E2 82
#define NOTE_F2 87
#define NOTE_FS2 93
#define NOTE_G2 98
#define NOTE_GS2 104
#define NOTE_A2 110
#define NOTE_AS2 117
#define NOTE_B2 123
#define NOTE_C3 131
#define NOTE_CS3 139
#define NOTE_D3 147
#define NOTE_DS3 156
#define NOTE_E3 165
#define NOTE_F3 175
#define NOTE_FS3 185
#define NOTE_G3 196
#define NOTE_GS3 208
#define NOTE_A3 220
#define NOTE_AS3 233
#define NOTE_B3 247
#define NOTE_C4 262
#define NOTE_CS4 277
#define NOTE_D4 294
#define NOTE_DS4 311
#define NOTE_E4 330
#define NOTE_F4 349
#define NOTE_FS4 370
#define NOTE_G4 392
#define NOTE_GS4 415
#define NOTE_A4 440
#define NOTE_AS4 466
#define NOTE_B4 494
#define NOTE_C5 523
#define NOTE_CS5 554
#define NOTE_D5 587
#define NOTE_DS5 622
#define NOTE_E5 659
#define NOTE_F5 698
#define NOTE_FS5 740
#define NOTE_G5 784
#define NOTE_GS5 831
#define NOTE_A5 880
#define NOTE_AS5 932
#define NOTE_B5 988
#define NOTE_C6 1047
#define NOTE_CS6 1109
#define NOTE_D6 1175
#define NOTE_DS6 1245
#define NOTE_E6 1319
#define NOTE_F6 1397
#define NOTE_FS6 1480
#define NOTE_G6 1568
#define NOTE_GS6 1661
#define NOTE_A6 1760
#define NOTE_AS6 1865
#define NOTE_B6 1976
#define NOTE_C7 2093
#define NOTE_CS7 2217
#define NOTE_D7 2349
#define NOTE_DS7 2489
#define NOTE_E7 2637
#define NOTE_F7 2794
#define NOTE_FS7 2960
#define NOTE_G7 3136
#define NOTE_GS7 3322
#define NOTE_A7 3520
#define NOTE_AS7 3729
#define NOTE_B7 3951
#define NOTE_C8 4186
#define NOTE_CS8 4435
#define NOTE_D8 4699
#define NOTE_DS8 4978
#define REST 0
// change this to make the song slower or faster
int tempo = 120;
// change this to whichever pin you want to use
int buzzer = D4;
// notes of the moledy followed by the duration.
// a 4 means a quarter note, 8 an eighteenth , 16 sixteenth, so on
// !!negative numbers are used to represent dotted notes,
// so -4 means a dotted quarter note, that is, a quarter plus an eighteenth!!
int melody[] = {
// Dart Vader theme (Imperial March) - Star wars
// The tenor saxophone part was used
NOTE_A4,-4, NOTE_A4,-4, NOTE_A4,16, NOTE_A4,16, NOTE_A4,16, NOTE_A4,16, NOTE_F4,8, REST,8,
NOTE_A4,-4, NOTE_A4,-4, NOTE_A4,16, NOTE_A4,16, NOTE_A4,16, NOTE_A4,16, NOTE_F4,8, REST,8,
NOTE_A4,4, NOTE_A4,4, NOTE_A4,4, NOTE_F4,-8, NOTE_C5,16,
NOTE_A4,4, NOTE_F4,-8, NOTE_C5,16, NOTE_A4,2,//4
NOTE_E5,4, NOTE_E5,4, NOTE_E5,4, NOTE_F5,-8, NOTE_C5,16,
NOTE_A4,4, NOTE_F4,-8, NOTE_C5,16, NOTE_A4,2,
NOTE_A5,4, NOTE_A4,-8, NOTE_A4,16, NOTE_A5,4, NOTE_GS5,-8, NOTE_G5,16, //7
NOTE_DS5,16, NOTE_D5,16, NOTE_DS5,8, REST,8, NOTE_A4,8, NOTE_DS5,4, NOTE_D5,-8, NOTE_CS5,16,
NOTE_C5,16, NOTE_B4,16, NOTE_C5,16, REST,8, NOTE_F4,8, NOTE_GS4,4, NOTE_F4,-8, NOTE_A4,-16,//9
NOTE_C5,4, NOTE_A4,-8, NOTE_C5,16, NOTE_E5,2,
NOTE_A5,4, NOTE_A4,-8, NOTE_A4,16, NOTE_A5,4, NOTE_GS5,-8, NOTE_G5,16, //7
NOTE_DS5,16, NOTE_D5,16, NOTE_DS5,8, REST,8, NOTE_A4,8, NOTE_DS5,4, NOTE_D5,-8, NOTE_CS5,16,
NOTE_C5,16, NOTE_B4,16, NOTE_C5,16, REST,8, NOTE_F4,8, NOTE_GS4,4, NOTE_F4,-8, NOTE_A4,-16,//9
NOTE_A4,4, NOTE_F4,-8, NOTE_C5,16, NOTE_A4,2,
};
// sizeof gives the number of bytes, each int value is composed of two bytes (16 bits)
// there are two values per note (pitch and duration), so for each note there are four bytes
int notes = sizeof(melody) / sizeof(melody[0]) / 2;
// this calculates the duration of a whole note in ms
int wholenote = (60000 * 4) / tempo;
int divider = 0, noteDuration = 0;
void setup() {
// iterate over the notes of the melody.
// Remember, the array is twice the number of notes (notes + durations)
for (int thisNote = 0; thisNote < notes * 2; thisNote = thisNote + 2) {
// calculates the duration of each note
divider = melody[thisNote + 1];
if (divider > 0) {
// regular note, just proceed
noteDuration = (wholenote) / divider;
} else if (divider < 0) {
// dotted notes are represented with negative durations!!
noteDuration = (wholenote) / abs(divider);
noteDuration *= 1.5; // increases the duration in half for dotted notes
}
// we only play the note for 90% of the duration, leaving 10% as a pause
tone(buzzer, melody[thisNote], noteDuration*0.9);
// Wait for the specief duration before playing the next note.
delay(noteDuration);
// stop the waveform generation before the next note.
noTone(buzzer);
}
}
void loop() {
// no need to repeat the melody.
}
Great, the Star War imperial march works!!!
What problems did I have and how did I solve it?
The connection is simple and I had no problems connecting it.
The code is somewhat complex, it was difficult for me to understand it, but with patience I was able to achieve it.
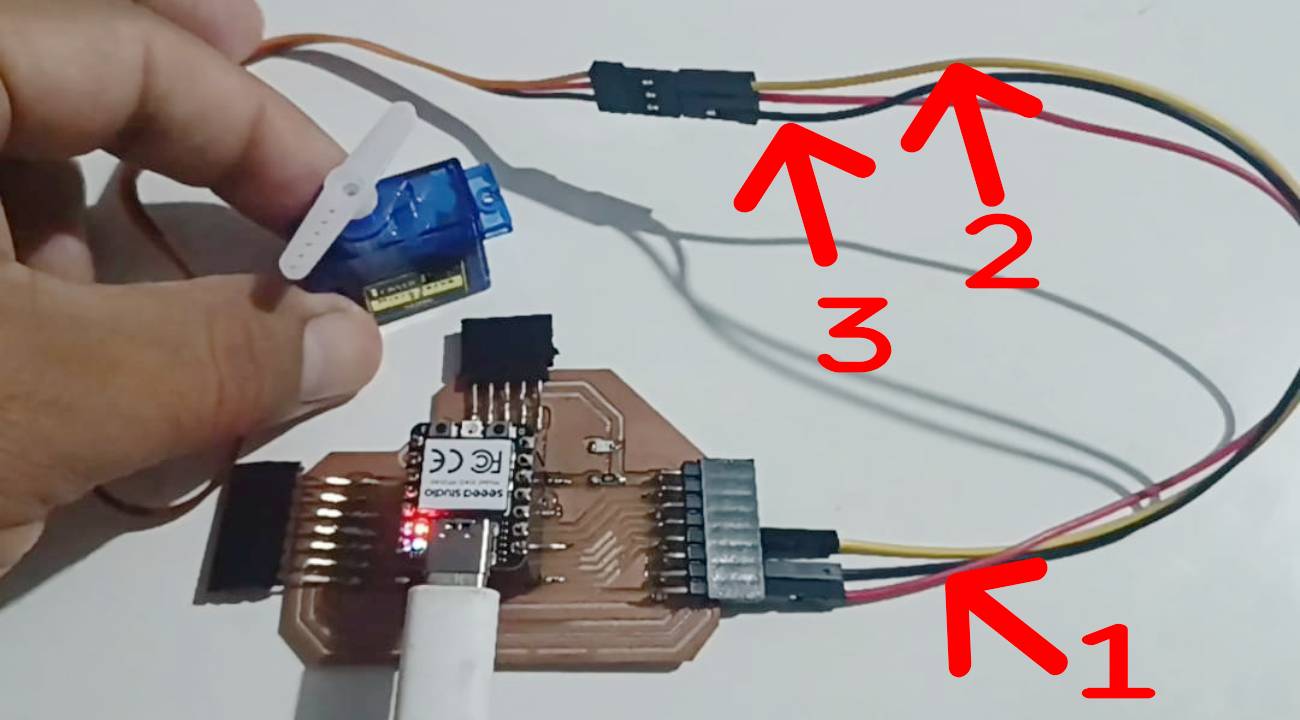
Now we will test an SG90 servo motor connected to the XIAO RP2040 microcontroller.
Principle:
A servomotor is a direct current motor, designed to move at a fixed angle and maintain that position until a new command.
All servos used for robotics have a 3-wire connector. VCC (red), GND (brown) and signal (orange):

Connection diagram.
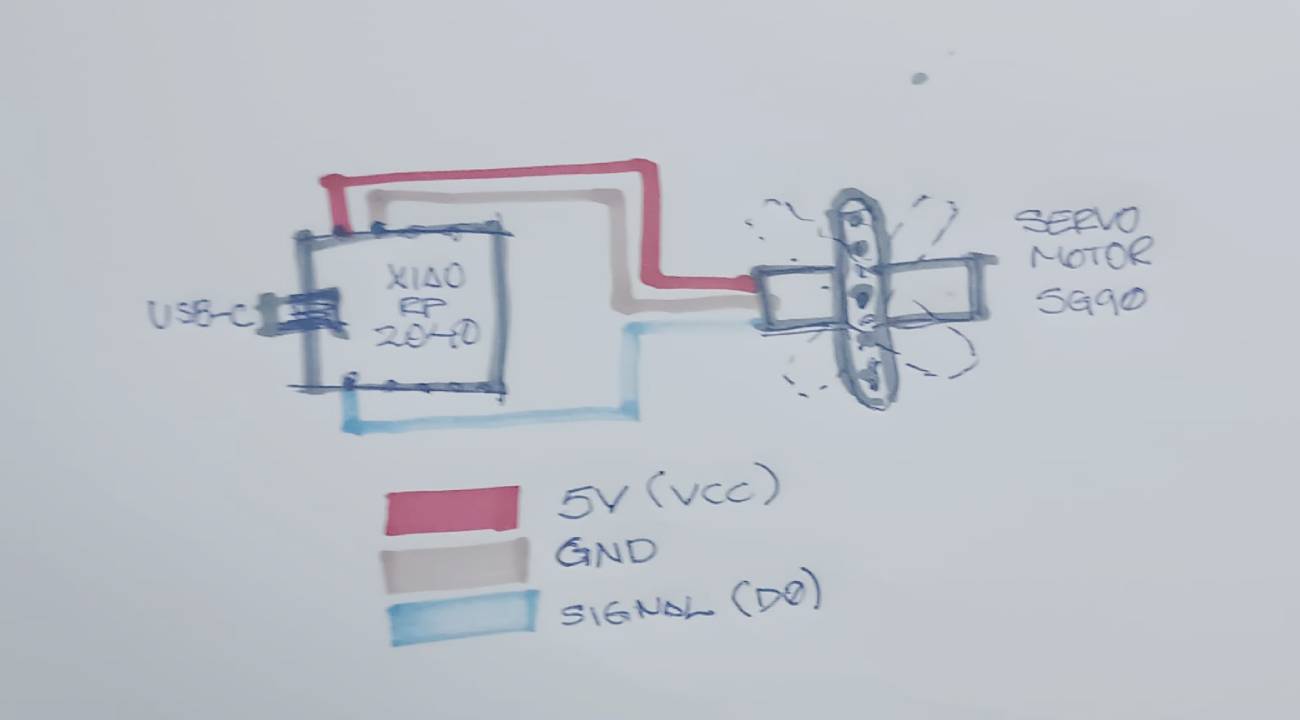
XIAO RP2040 microcontroller.

Connection of the servo motor to the "Crisduino" PCB.
1. 5V (VDC)
2. Signal (D0)
3. GND
Now we write a simple code to see the movement of the SG90 servo motor connected to the XIAO RP2040 microcontroller.
#include <Servo.h> //Import library
Servo servocrisduino;
void setup() {
servocrisduino.attach(D0);
}
void loop() {
servocrisduino.write(0);
delay(2000); // wait 2 seconds
servocrisduino.write(90);
delay(2000); // wait 2 seconds
servocrisduino.write(180);
delay(2000); // wait 2 seconds
}
Result of the movement of SG90 servo motor connected to the XIAO RP2040 microcontroller.
Download files
Here we can find and download the design original files