XplorerBot, An advanced Unmanned Ground Vehicle (UGV)
This versatile and robust platform opens doors to a wide range of applications in diverse industries. Whether the user is involved in research, exploration, surveillance, or autonomous operations, the Discovery offers exceptional features and user-friendly controls to meet the user's needs.
Technical Description:
-
Robust and Agile Chassis:
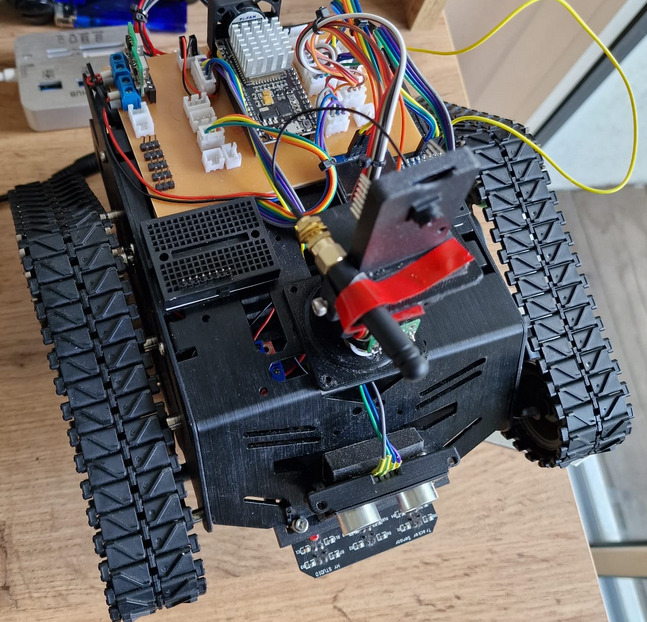
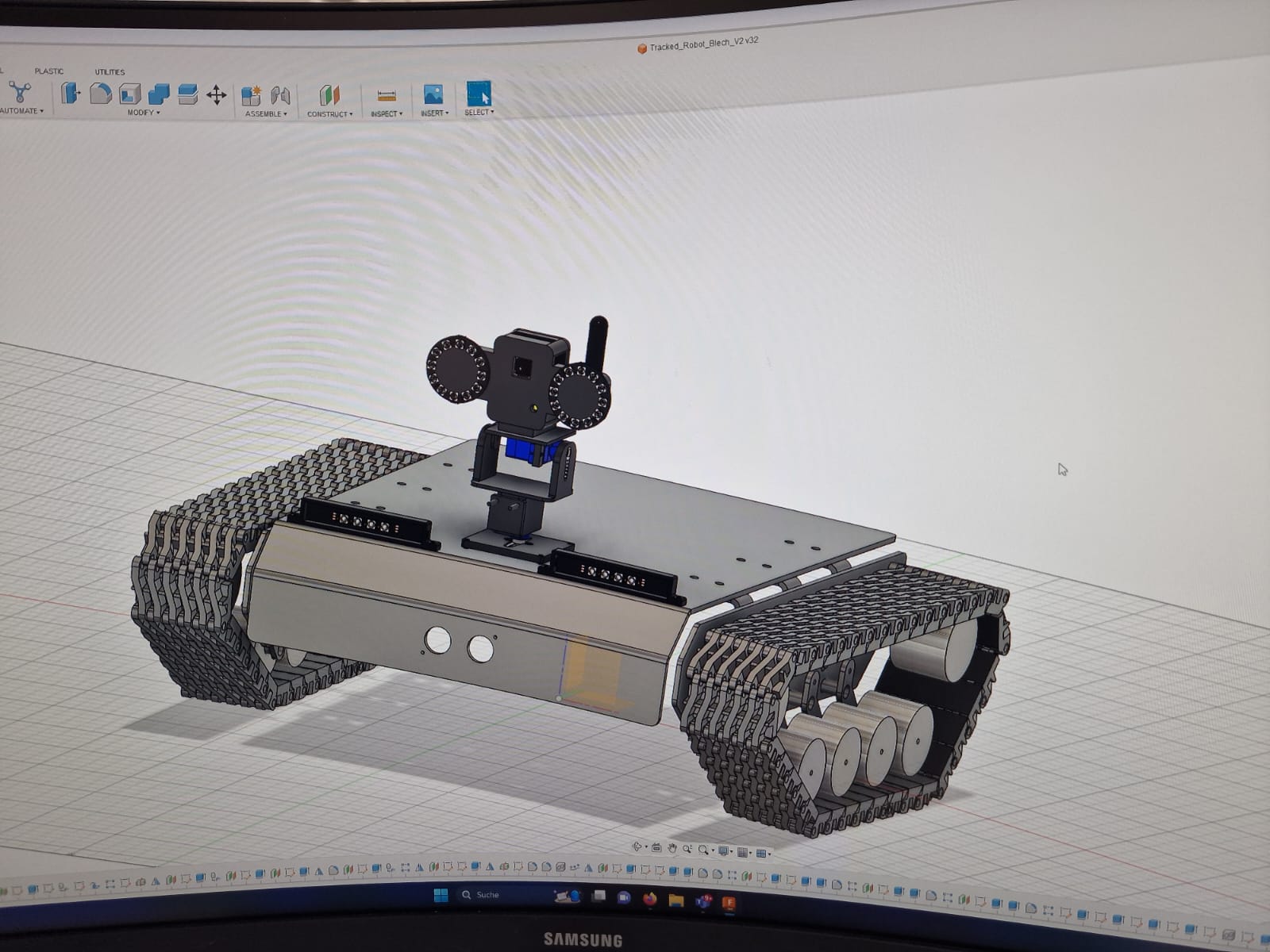
The XplorerBot is made of aluminum alloy chassis, providing stability and protection for its internal components. Its compact design and agile maneuverability make it well-suited for navigating various terrains and environments with ease.
-
High-Performance Motor System:
With its powerful DC motors and heavy-duty motor drivers, the Discovery delivers impressive speed and torque capabilities. It effortlessly handles different payloads and overcomes challenging surfaces, ensuring reliable performance in demanding scenarios.
-
Precise Control System:
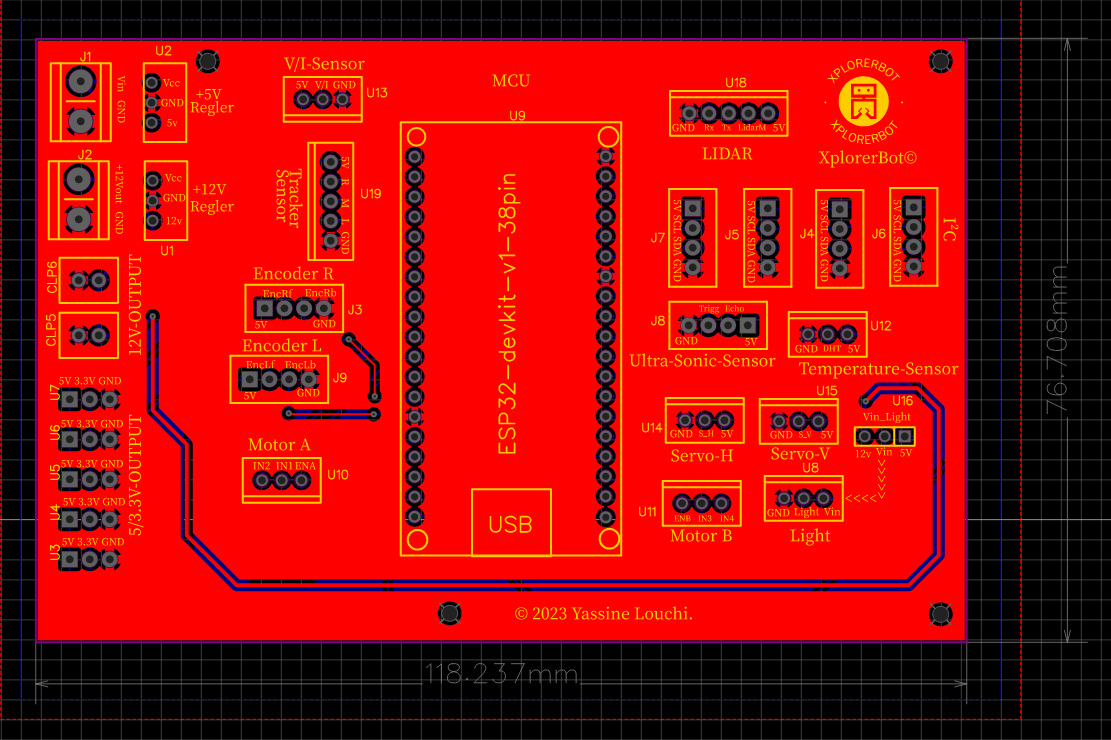
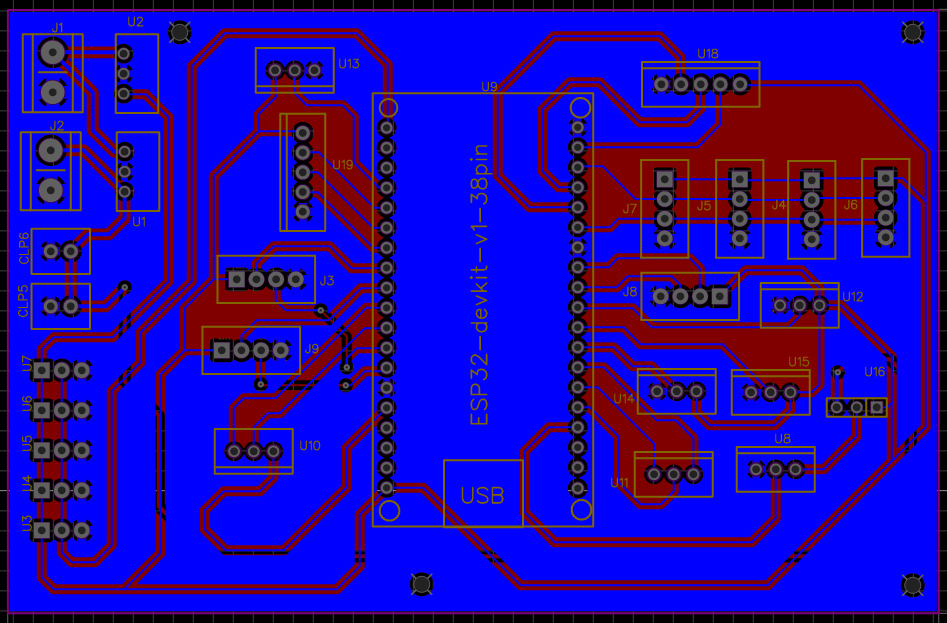
The XplorerBot incorporates an advanced control system comprising an integrated MCU and motor driver board und an encoder for the DC-Motor. This system guarantees precise control over the vehicle's movements, enabling accurate navigation and positioning.
-
Comprehensive Sensor Suite:
Equipped with an array of sensors, the Discovery excels at perception and environment awareness. It includes an ultrasonic und TOF sensor for distance measurement, an infrared sensor for object detection, and a gyroscope for orientation sensing, line following sensor and an ESP32-Camera. These sensors empower the vehicle with enhanced autonomy and adaptability to its surroundings.
-
Flexible Expansion Capabilities:
The Discovery offers a variety of expansion interfaces, including GPIO pins and I2C ports. These interfaces enable seamless integration with additional sensors, actuators, or modules, catering to specific requirements and facilitating customization and system integration.
-
Extensive Software Support:
It provides comprehensive software support for the Discovery, accompanied by a user-friendly development platform. Users can leverage the Software Development Kit (SDK) and libraries to program and control the vehicle, develop autonomous behaviors, and seamlessly integrate with third-party software tools.
-
Remote Control and Communication:
With support for Wi-Fi and Bluetooth wireless communication, the Discovery allows remote control via PS4-controller and seamless data transmission. This feature enables real-time monitoring, data collection, and operation from a distance, enhancing convenience and flexibility.
-
Efficient Power Management:
The XplorerBot incorporates an efficient power management system, ensuring prolonged operation. It supports a rechargeable power bank, delivering a stable power supply during extended missions.
Sensors:
To enhance the functionality and autonomy of the XplorerBot, several essential sensors are included. These sensors provide crucial data for perception, environment awareness, and precise navigation. The following are some key sensors typically incorporated into the Discovery:
-
Ultrasonic Sensor:
The XplorerBot features an ultrasonic sensor and TOF-Sensor that enables accurate distance measurement. It emits ultrasonic waves and measures the time it takes for the waves to bounce back after hitting an object. This data helps the robot detect obstacles and avoid collisions, ensuring safe navigation in various environments.
-
TOF(Time of flight) Sensor:
An TOF-sensor is integrated into the XplorerBot to detect the distances to objects in its vicinity. This sensor assists in identifying potential hazards and aids in collision avoidance.
-
GPS Module:
The inclusion of a Global Positioning System (GPS) module enables the XplorerBot to determine its precise geographical location. By leveraging signals from multiple satellites, the UGV can calculate its coordinates, altitude, and velocity. The GPS data allows for accurate mapping, navigation, and localization during outdoor operations.
-
Camera Module:
A camera module is often integrated into the XplorerBot to capture visual information from its surroundings. This camera can be used for tasks such as object recognition, tracking, and image processing. It provides valuable visual data for real-time monitoring, situational awareness, and vision-based navigation.
-
LIDAR Sensor:
In some configurations, the Discovery may include a Light Detection and Ranging (LIDAR) sensor. LIDAR employs laser beams to measure distances and create detailed 3D maps of the XplorerBot's surroundings. This sensor is particularly useful for advanced perception, obstacle detection, and autonomous mapping applications.
-
IMU (Inertial Measurement Unit):
The Discovery may incorporate an IMU that combines multiple sensors, such as accelerometers and magnetometers. The IMU provides data on the UGV's linear acceleration, angular velocity, and magnetic field orientation. This information is vital for inertial navigation, stabilization, and sensor fusion algorithms.