Week twenty: Project development

For this week, we had to complete our final project tracking our progress, implement a project plan and answer some questions
Project plan
I restructured my project and as the presentation date approaches I elaborated a diagram that allows me to organize my time in specific functions every day
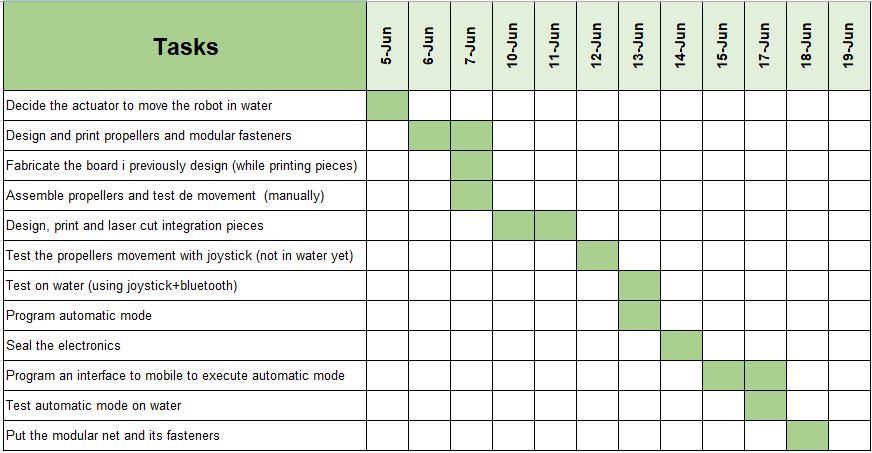
What tasks have been completed, and what tasks remain?
I completed almost all the tasks, I have the robot with the corresponding integration, I did tests in the water in manual mode using the joystick and bluetooth, the robot is already waterproof, since I sealed the electronics well with 3D printing and lined some parts with resin to make it waterproof.
The tasks that I need to do are the programming of the interface for mobile and the automatic mode, which will be a loop, I also need to place the modular net, and finish the video with a heroshot of the complete project
What has worked? what hasn't?
The motors and propellers worked together, the joystick with the bluetooth modules and the composite floats very well, and the 3D impressions fit very well to the ship's skeleton. However, I had problems with the propellers, since these were test, I wanted to test the mechanism as soon as possible and I printed it with bad quality (3% of infill), so I printed other better quality ones, which take approximately 6 hours individually.
On the other hand the shaft that joins both heads was moving a bit, so I redesigned the coupling mechanism to hold it fixed, and varnished it with epoxy resin, since this is where the cables of an engine pass, in this way I assure myself that the water never enters the PLA
Next I show the video of the failure of the low quality propeller, the edition was courtesy of my colleague Danny Cotera, who helped me recording
What questions need to be resolved?
For now the questions that I need to answer are how to place the modular net, and the speed with which the robot can move in the water, since the automatic mode can be affected by the amount of garbage that loads, I must also test the maximum bluetooth alcande to be able to be controlled manually.
What will happen when?
As mentioned before, it could happen that the paper absorbs the water in some way, for that it is necessary to ensure that all 3D printed fasteners, as well as the supports for the network and the axis that connects both heads of the robot, are varnished with epoxy resin or other element that makes them waterproof
What have you learned?
I learned a lot during all this time, for example I improved my 3D design skills, before participating in fab academy I only modeled in Solidworks, now I use well inventor and I could design organic forms in Rhinoceros, I also learned a lot about electronics, before I could only use plates electronic commercial and protoboards, now I can design and manufacture my own plates, optimizing space and improving the aesthetics of the project. I also learned about the various manufacturing processes, and this is very valuable for my career, since we must always find the optimal way to manufacture something, improving times, costs, quality, etc. And one of the things that I liked the most was how the information is shared, in such a way that a person on the other side of the world can rely on the information and experience that we collect.