Week thirteen: Applications and Implications

For this week, we had to answer some questions thinking in our final project
What will it do?
I'm going to manufacture a floating robot that is capable of collecting garbage from lakes and lakes while it is sailing. The robot will have 2 heads, and in the middle it will have an axis that holds them together, as well as a net that will allow you to collect the waste that you find in your way. The robot will have 2 ways of operating, manual and automatic. The manual form consists of using a wireless joystick via bluetooth to operate the robot's direction, this mode is useful to move it away or closer to the edge when you want to remove or place it. The automatic mode will consist of pressing a button from a smartphone application and the robot will take a predetermined route. For the propulsion system I plan to place two propellers, one on the corresponding side of each head. The idea of the project is to leave the robot collecting garbage for a while while the user performs other activities. In addition, the network and its couplings will be modular so if you want you can change it to larger ones, as far as the size of the robot allows, of course.
Who has done what beforehand?
I found a project by Sam Calisch, he made a kayak using a CNC milling machine to machine the pieces, once assembled the skeleton bathed a cloth with Dacron, Xynol and Epoxy. The result is a kayak that floats on water, and serves as a means of transport. You can find more about Sam's projects here
I also found another student from the Fab Academy who this year plans to build an autonomous boat, using many digital manufacturing tools, also wants to use it as a pedagogical method to teach engineering.
You can visit the website of Remy Ducros
What materials and components will be required?
Where will they come from?
Most components will be obtained from the fablab, PLA filament, electronic components, DC motors, epoxyc resin, MDF. The others I will obtain from local suppliers.
How much will it cost?
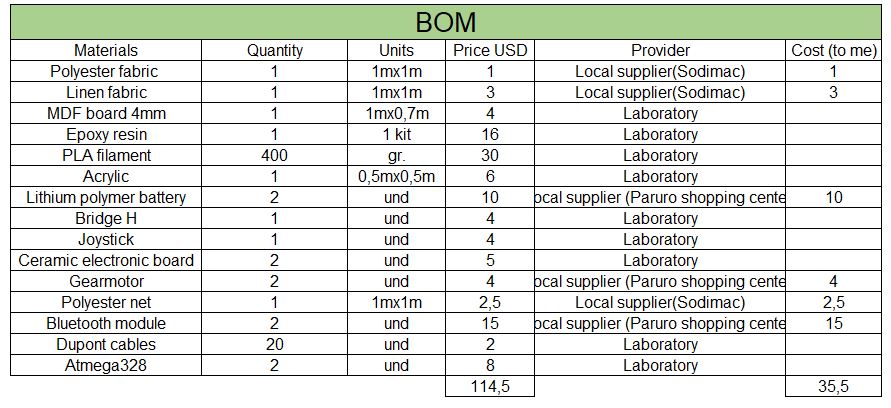
As you can see in the list of materials, the laboratory will provide me with most of the components, so I would pay approximately 36 dollars, but if I would have to invest in filament and electronic components, I would have to invest approximately 115 dollars
What parts and systems will be made?
All the systems and parts will be manufactured in the laboratory, the physical system will be made with an MDF skeleton for each head and a composite of fabrics with epoxy resin will be placed so that the head is waterproof, hard and lightweight. in the middle of the heads a shaft that holds together will be placed. The network and its couplings will be modular and will be printed in 3D, like the propellers. The idea is that the engines are controlled by a user either automatically or manually through a microcontroller and bluetooth devices. While the robot navigates its route, it will collect the plastic waste it finds.
What processes will be used?
CAD design:
The skeletons of the heads, the cover, the axis that connects them and all the supports or fixers to integrate the electronics will be designed.
3D printing:
The propellers designed will be printed on PLA filament, as will all the supports for motors and electronics, the axis that joins the heads will also be printed.
Laser cutting:
The pieces will be cut with laser to make the skeleton of the head and the hermetic covers to close the cover of each head.
Electronic design & production:
The main board will be designed using an Atmega 328, due to its capacity and compatibility with the arduino libraries, its design should contemplate communication with the bluetooth module that will allow to connect with the joystick or smartphone, it must also have a regulator since the source to control the motors will have greater voltage. Another plate for the joystick must also be designed and manufactured, also with a bluetooth module.
Composites:
To coat the skeleton of the boat, a composite of fibers and epoxy resin will be used to give hardness, impermeability, resistance and make it light.
What tasks need to be completed?
The head parts must be designed and laser cut with MDF.
The supports mentioned above must be printed in 3D.
The composite should be evaluated by evaluating the materials to grant the necessary faculties for the performance of the robot.
The electronic board must be manufactured contemplating all the requirements.
The electronics must be integrated in such a way that water can not fall.
What other questions need to be answered?
I need to find the optimal materials to make the composite.
I must find a way to make 3D prints that contain electronic components waterproof.
I need to find a net of a resistant material.
I have to think about how to fit the modular part of the net.
What is the schedule?
Before the end of the month, I plan to finish my design and assemble the pieces, to have the skeleton ready for the week of composites. In the week of networking I plan to practice with the bluetooth module and communicate something, thinking about the wireless joystick, once and I will design the electronic board using the 328 atmega, I will also make a diagram with dates to be able to advance specific objectives per day.
How will it be evaluated
The first test will be the design of the head printed in 3D, to see the stability and see what I can improve, after these tests I will fabricate the skeleton with laser cutting and composites, and test the result in the water. Then there will be the test of the propulsion system but in an isolated way (without touching the water yet), if I manage to control the direction of the motors wirelessly I will be able to do the test in the water, but not before coating the electronics with something to avoid lose my progress in a test. and once the network is integrated, I will test in a pond to see the capacity of collection, how the weight affects the automatic mode, and the duration of the batteries.