
Big 3D-Printer
With a maximum volume of 150 x 90 x80 cm
Some of our Ultimaker
We´ve got more than 25 3D-Printer of diffrent types

Greeting
Our best employee in HRW FabLab
Assignment 17:
Applications and Implications
Task:
- Propose a final project that integrates the range of units covered, answering the following questions
What will it do?
In my final project i´d like to build a foot-motion-controller for a simple robot arm. I started with the idea of a open system which could be connected to any device but I realized, that there are too many different communication protocols so that it wouldn´t work. So I decided to build a closed system of a foot-motion-controller with which you are able to control a robot arm.My motivation was, to use the knowledge of the fabacademy to show that especially people with disabilities could build their own assistant systems. So my system should be the first step of a larger project for people without functional arms and hands. Maybe my system will allow them in the future to do jobs they weren´t able to do before. In the first step I will keep the controlled robot arm simple, because the main focus is the individual motion-controller. So it should be a platform for any interested man to develop their own individual assistenent system. My robot arm should only be a example.
Who's done what beforehand?
Robot arms are one of the most final projects of the last years so I will find a lot of input here. But I will focus on the motion-controller. Here I didn´t find any comparable projects in the last classes. At a first research I didn´t find a lot of input of how to control a robot via accelerators and attitude sensors so I will develop my own solution.What will you design?
I will design a complete new robot arm with at least three degrees of freedom and a grabber to do simple pick and place jobs. I will use servos, because they are easy to control but they have a limited range.The main focus will be on the foot-controller. Here I will design a individual solution for my foot. It should fit perfectly on my foot and should contain the motion controller and the additional buttons to control the grabber. Therefor I will make a 3D scan and develop a personal holding.
In the first step I don´t want to develop my own board, because there are a lot of difficulties in acceleration and attitude sensors. After the complete system is working well the pcb design is the next step but I don´t know jet how far I´m going to come is the two remaining weeks.
What materials and components will be used?
I will use a lot of 3D-printing, so I will use normal PLA and ABS. For the individual feet adapter I will try to print it with flexible material. For the robot arm I will use additional some wood for the lasercutter. Until now I think I won´t use some composites or molding material. There is no useful part to make with .Bill of Materials
Component/Part/Material................... |
Number......... |
Priceper piece/ meter/ kilogram |
| Endless Servo | 3 | ~5€ |
| MPU6050-Sensor | 1 | ~7€ |
| Button | 2 | ~0.20€ |
| switch | 2 | ~0.50€ |
| screw | 6 | ~0.05€ |
| shim | 6 | ~0.02€ |
| screw-nut | 4 | ~0.02€ |
| cable | ~3m | ~0.5€ |
| relai | 1 | ~1.50€ |
| Pump | 1 | ~8€ |
| Vacuum-hose | 0.5m | ~1.50€ |
| PLA | ~0.3kg | ~20€ |
| heat shrink tube | ~0.2m | ~1.60€ |
| Acryl | ~0.3m^2 | ~3€ |
| elastic Band | ~0.3m | ~0.5€ |
Where will come from?
The most materials I will use are normal FabLab standards so they will be already there. I think I don´t need any special materials or components which weren´t available in a normal building center.How much will they cost?
I will build the system as cheap as possible. The most expensive part will be the curie nano board which I will use in the first step. The rest of the components and materials will not be more than a few euros. At the end of the project I will make a complete price-list of all parts.What processes will be used?
The main process will be the 3D design and printing. Additional I will use lasercutting, vinyl cut and electronic design. The other big part will be the programming of the controller. See below a detailed gant-chart for the next two weeks.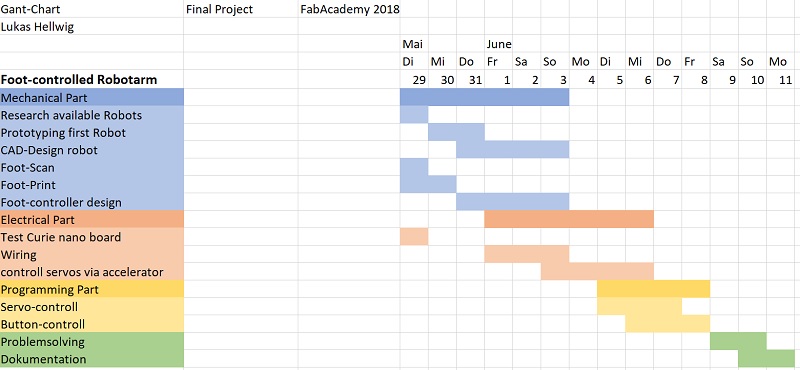
What questions need to be answered?
The main question will be how repeatable the motion detection will work and if it is possible to control a robot with it.there will pop out a lot of new questions during the process so I wil handle the problems like the sixteen weeks before: try and error. 😊
