PROJECT NOTE
Kinematics
The kinematics usefull for my project are: Classical Cartesian, H-Bot and Core XY
In the Cartesian stage every axis have own motor, H-bot and CoreXY use both motor to move in XY The big choice is between H-Bot and CoreXY
Reading about these kinematics I discovered some strengths and weaknesses for both.
Classical Cartesian
This stage have one motor for Y and another one for X, but the X motor is directly linked to the axis and this increase the weight on Y axis.
More weight means less movement speed
H-BOT
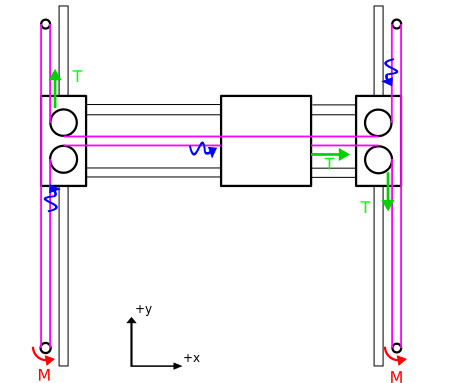
H-Bot have a clean and lightweight design.
The big problem of H-bot you can see in the image above:to move in X directio I have to spin motors counterclockwise, but this produce an hard net torque on the X axis.
One way to solve this problem is to create a strong structure, but my project will be made by wood or 3D printed parts that not guarantee this rigidity .
Core XY
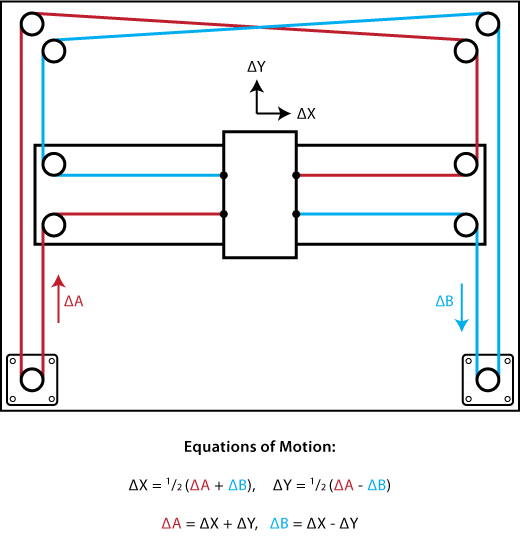
CoreXY have the same clean and lightweight design of H-Bot.
The crossing belt solves the net torque problem as shown in the figure above.
One problem of CoreXY is the crossing belt that maybe cause a misalignment of the belt route. I'm planning to use fishing line instead the classical belt.
Useful links
Research and Inspiration for final project
In this page I will collect and describe useful links that possibly help me to my target.
Sub-division
- Mechanics
- Motions
- Electronics
- Programming
Mechanics
Using fishing line to move the axis, refer to: PrintBQ
Theme: some about fishing braid
Theme: Wolf Bot
Theme: RichRap awsome printer
Motions
As explained in the Project Note page I will use CoreXY as kinematics
Theme: new corexy twist
Electronics
Pighixxx Pinout of most used atmega board and chips
Starting form the beautiful MTM project, I want to make a similar circuit board that possible to drive by Inkscape. To do this I need to make 2 modules, one for the basic configuration with 2 stepper driver and 2 RC servos, and another one like a modular stepper board with one stepper driver and one RC servo.
I'm thinking about using a scheme like this:
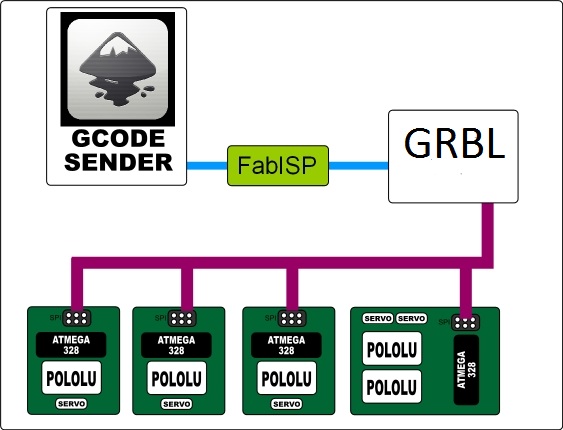
The boards will be like Gestalt Node but the communication with arduino will be via ISP or I2C
Programming
The big gap is the software, Gestalt Node uses own software wrote in python, but my things is to use Inkscape to drive the machine. In order to do this I decided to study around Inkscape plugins developing.
Searching about plugins i discovered a plugin used for the Eggbot machine, is a beautiful plugin that allow to drive a simple cartesian bot with a tool like a pen. One problem about this plugin is that the eggbot board have a PIC microprocessor instead Atmega that I want, so I will take inspiration on this plugin and I will rewrite to send a normal GCode.
The Eggbot project fortunately is well documented Eggbot on Github
and: Eggbot plugin description
Inskape have already other nice plugins to convert SVG to gcode like: Gcode Tools
Another ispirational maybe is this Spherebot project
To write a new inkscape plugins i will follow these links Inkscape forum
and Inkscape wiki
Using these library pycam
and pygrbl