Exercise 14
06.05.2015
Interface and Application Programming
Assignment
Scarabocchio
During this week I had to make a project for CASA JASMINA and in particular a toy for the children room.I like machine that draw and inspired from my past I decided to make a digital spyrograph and I call it SCARABOCCHIO
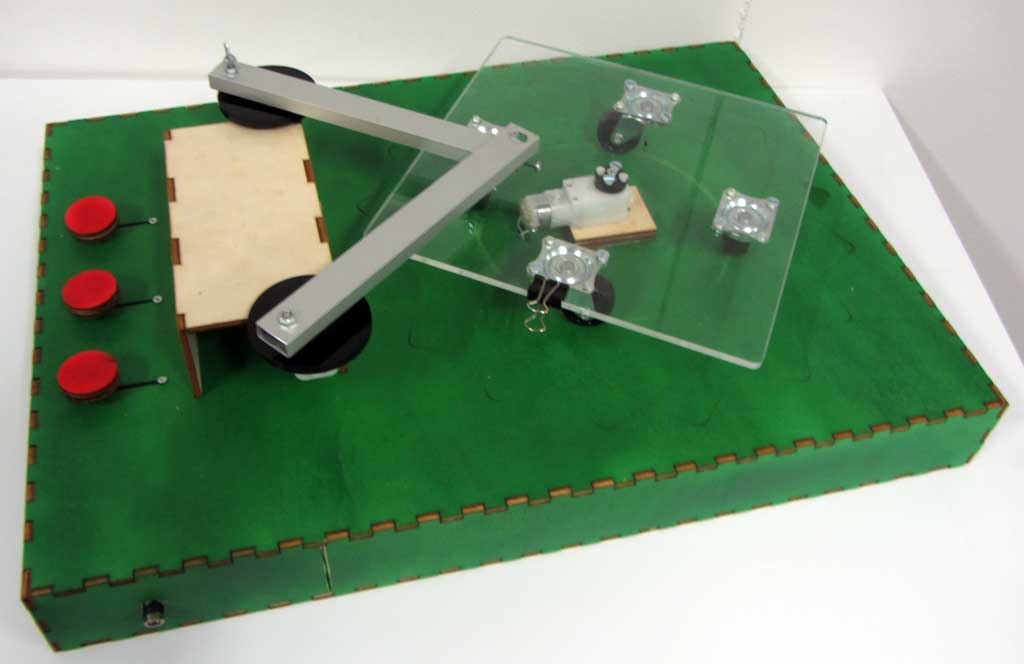
It consist in 3 DC motors and 3 linear potentiometer, every potentiometer control one motor and changing the speed of every motor is possible to make different draw.
For this project I haven't time to make a custom board so I decided to make one on a proto shield, the circuit is really easy to made following this schematic
In the protoshield I've just triplicate this scheme and put the motor on pin 3 - 6 -11
For the event is better to use this toy with a mechanical feedback so I leaved it with potentiometer to control the speed, but I tried also to make some digital!
Searching on internet I see that is very easy to control input and output from Processing
There are two library that are perfect for the scope:
Arduino Processing Library
ControlP5
these library with Firmata work very well
In Processing I followed a tutorial to write this simple sketch
controlP5.addSliderdraw a slider
arduino.analogWrite(3, Motor1);write signal in the selected pin
import processing.serial.*;
import cc.arduino.*;
import controlP5.*;
ControlP5 controlP5;
Arduino arduino;
Textarea myTextarea;
int Motor1 = 5; // 0-255
int Motor2 = 5; // 0-255
int Motor3 = 5; // 0-255
void setup() {
size(400,400);
println(Arduino.list());
arduino = new Arduino(this, Arduino.list()[0], 57600);
for (int i = 0; i <= 13; i++)
arduino.pinMode(i, Arduino.OUTPUT);
controlP5 = new ControlP5(this);
myTextarea = controlP5.addTextarea("txt1")
.setPosition(20,10)
.setSize(255,30)
.setFont(createFont("verdana",14))
.setLineHeight(14)
.setColor(color(0))
.setColorBackground(color(204))
.setColorForeground(color(204));
;
myTextarea.setText("Scarabocchio controller"
);
controlP5.addSlider("Motor1",0,255,Motor1,40,60,255,40);
controlP5.addSlider("Motor2",0,255,Motor2,40,160,255,40);
controlP5.addSlider("Motor3",0,255,Motor3,40,260,255,40);
}
void draw() {
arduino.analogWrite(3, Motor1);
arduino.analogWrite(6, Motor2);
arduino.analogWrite(11, Motor3);
}
This is the PC side controller 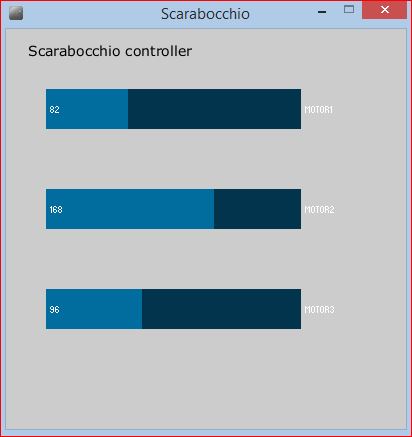
The arduino side is more simple, I had just to upload the SimpleAnalogFirmata sketch
/*
* Firmata is a generic protocol for communicating with microcontrollers
* from software on a host computer. It is intended to work with
* any host computer software package.
*
* To download a host software package, please clink on the following link
* to open the download page in your default browser.
*
* http://firmata.org/wiki/Download
*/
/* Supports as many analog inputs and analog PWM outputs as possible.
*
* This example code is in the public domain.
*/
#include <Firmata.h>
byte analogPin = 0;
void analogWriteCallback(byte pin, int value)
{
if (IS_PIN_PWM(pin)) {
pinMode(PIN_TO_DIGITAL(pin), OUTPUT);
analogWrite(PIN_TO_PWM(pin), value);
}
}
void setup()
{
Firmata.setFirmwareVersion(0, 1);
Firmata.attach(ANALOG_MESSAGE, analogWriteCallback);
Firmata.begin(57600);
}
void loop()
{
while (Firmata.available()) {
Firmata.processInput();
}
// do one analogRead per loop, so if PC is sending a lot of
// analog write messages, we will only delay 1 analogRead
Firmata.sendAnalog(analogPin, analogRead(analogPin));
analogPin = analogPin + 1;
if (analogPin >= TOTAL_ANALOG_PINS) analogPin = 0;
}
Below a sample video of Scarabocchio controlled by
Processing