Assignment: model a possible final project
I started the assignment trying to imagine the machine I want to build, how it look like, how it moves... and after some quick drawings on my notebook I continued my research on the internet.
I tried to find different mechanical approaches to a CNC machine, focusing on small and opensource alternatives, and I started a list. (click the gifs to view the original video)
one — arm, joints
there are a lot of robotic kits in the marquet that allow you to recreate big industrial robots, like the kuka machine that we have at the FAB Lab Barcelona.
|
|
two — x/y axis, plotter printer
the most common setup for a CNC machine.
|

|
three — hanging cables
Santi Fuentemilla, one of our instructors, remind me the Drawbots. There is a tutorial at the FAB Academy 2013 site to create one of this.
|

|
four — extendible
I was looking hard for this project during the first week, and a few days later, during the regional review, Gianluca Pugliese remind me the name of the project. Piccolo. Gianluca, Szlizárd Kados and Jani Ylioja, are also developing a CNC machine for his final project, all of them for different applications. I'll keep track of their projects. I didn't investigate yet the rest of the students, just in case that somebody else is doing a similar project. I'll be doing little by little (as well as investigate students from other years).
|
|
five — spiderbot
The three axis in vertical, sliding up and down.
|
|
six — moving bed
Another option to contemplate is to move the device instead than moving the "finger". The Blind Self Portrait project, mentioned the last week, or some 3D printers work this way.
|
|
seven — lego mindstorm robot
With similar principles than spiderbot or the hanging drawbot.
|
|
eight — four legs, hexapod robot
This is crazy.
|

|
At this point, I began to feel overwhelmed for the amount of possibilities of my project. This list is just the begining of the research that I want to do for the final project, but I felt that I need to start to focus and define a use for my machine in order to be productive. I had a couple of ideas, and it was the moment to decide one.
A bot that upload selfies to Instagram.
The idea behind the project, is to explore unexpected relationships between people through social networks, connected devices and memes, trying to emulate with a machine, a very existing human behaviour.
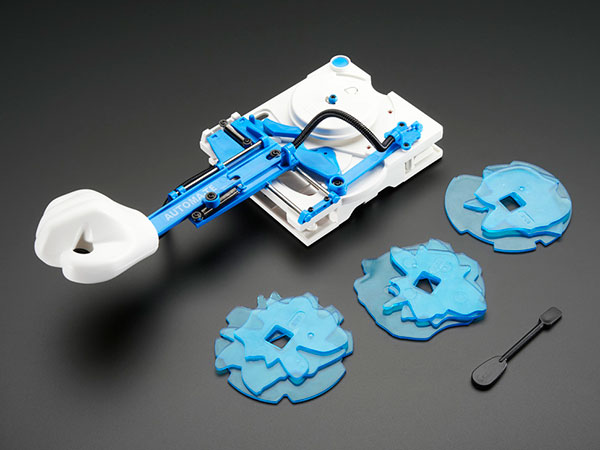
With the idea for the project clearer, I found some other interesting references. Similar to Piccolo, the Auto Writing Machine by Gakken. Beautiful.
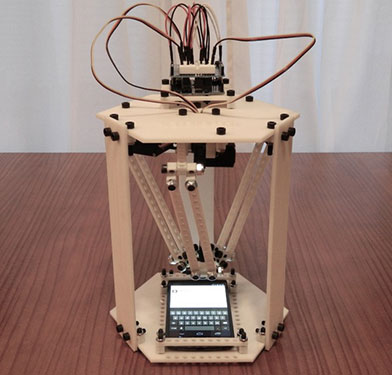
And attention! Two machines made to interact with touch devices. The first one, called Plotclock, based on an analog previous version of the same device, and the second, Tapster, based on the spiderbot mechanism.

Regarding the week assignment. I worked with image editing tools such as Photoshop and Illustrator, but mainly, I focused on programs that I didn't use before such as Rhino and Blender. We had the opportunity to have two experts at the FAB Lab introducing both 3D platforms. During the explanation of Rhino I felt lost easily due the differences between Windows and Mac interfaces. I'll give it a try another day. Blender was easier for me. The next image is generated in Blender, after learn how to modelate, iluminate and render.
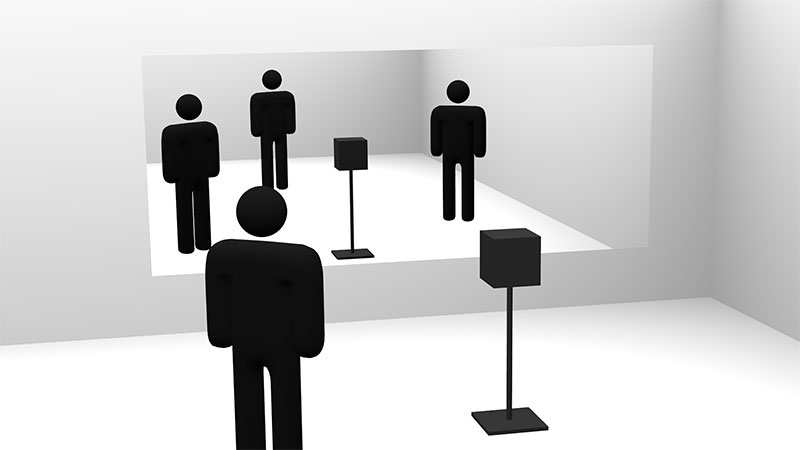
The Instagram bot is not only the machine, is an installation. This render propose a setup for the exhibit space. The robot is almost as high as a person, and is placed in front of a big mirror, to shot the selfies. The space is open, allowing people to move around and become part of the installation by appearing at the photos that the robot takes.