| Week8 | Embedded programming |
| 8-Bit Microcontroller Advanced RISC Architecture | - 120 Powerful Instructions and 32 x 8 General Purpose Working Registers. | I/O and Packages | - Available in 14-Pin SOIC and PDIP - Twelve Programmable I/O Lines |
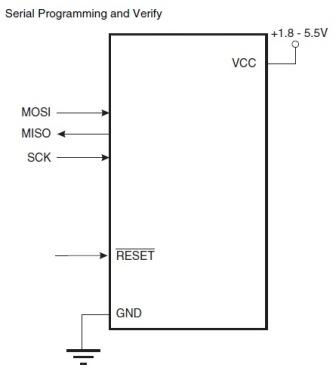
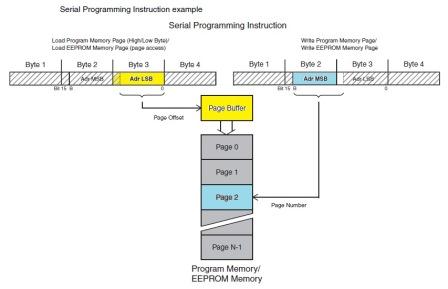
| Non-Volatile Program and Data Memories | - Program Memory Flash of 2/4/8K Bytes (Endurance: 10,000 Write/Erase Cycles) - Programmable EEPROM of 128/256/512 Bytes (Endurance: 100,000 Write/Erase Cycles) - Internal SRAM of 128/256/512 Bytes (Data Retention: 20 years at 85°C / 100 years at 25°C - Programming Lock for Self-Programming Flash & EEPROM Data Security) | Special Microcontroller Features | - DebugWIRE On-chip Debug System - In-System Programmable via SPI Port - Internal and External Interrupt Sources: Pin Change Interrupt on 12 Pins - Internal Calibrated Oscillator - On-chip Temperature Sensor |
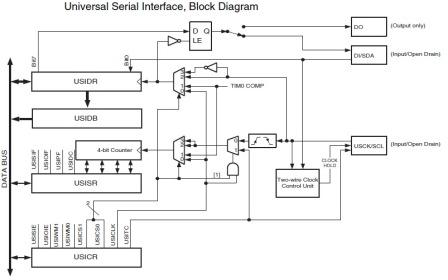
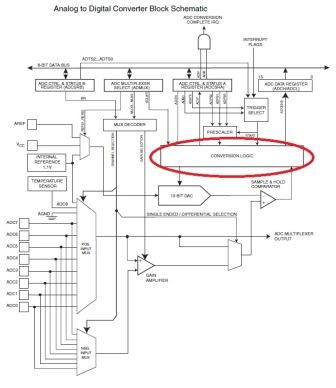
| Peripheral Features | - One 8-Bit Timer/Counter with Two PWM Channels - 10-bit ADC - Universal Serial Interface | Speed Grade | - ATtiny44V 0 – 4 MHz @ 1.8 – 5.5V 0 – 10 MHz @ 2.7 – 5.5V - ATtiny44 0 – 10 MHz @ 2.7 – 5.5V 0 – 20 MHz @ 4.5 – 5.5V |
| Operating Voltage: | 1.8 – 5.5V for ATtiny44V 2.7 – 5.5V for ATtiny44 | Industrial Temperature Range: -40°C to +85°C Low Power Consumption | - Active Mode (1 MHz System Clock): 300 μA @ 1.8V - Power-Down Mode: 0.1 μA @ 1.8V |

 |  |

 | FabISP in-circuit programmer: Assignment 4 Electronics production |
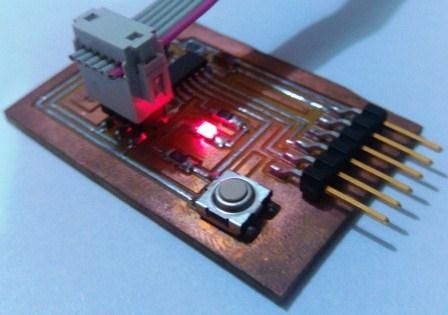
 | To connect the controller using the ISP (J1) terminal to the board microcontroller, I built a connection cable, (I had to be very careful on identifying the terminals in order to avoid malfunctions). |
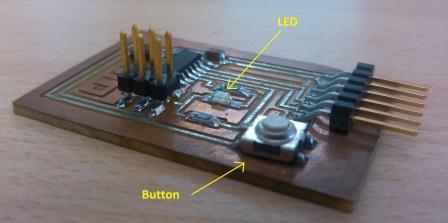 | Echo hello-world board,: Assignment 6 Electronics design |

| 1. Get the arduino program | Download and install Arduino Software Version 1.03 or newer. |
| 2. Get ATtiny microcontroller driver | Download the ATtiny Master.zip |
| 3. Unzip the attiny master.zip file. | It should contain an “attiny-master” folder that contains an “attiny” folder. |
| 4. Copy the folder "attiny" | Copy the “attiny” folder from the unzipped ATtiny master.zip to the “hardware” folder inside the Arduino Folder. That contains the file boards.txt and another folder called variants. |
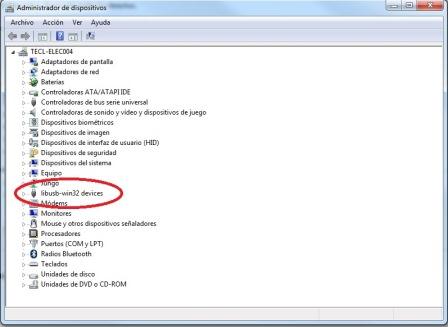
| 1. Get the Driver usbtinyisp_libusb-win32_1.2.1.0 | To use USBTinyISP with the 64-bit versions of Windows 7 or Vista |
| 2. Install the Driver | There is still a warning that “Windows can’t verify the publisher of this driver software” but there are no more errors about digital signatures and the new drivers appear to install and work correctly |
| First we need to set the type of microcontroller used. | 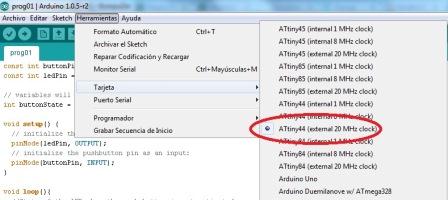 |
| Second we define the com port used by the programmer. | 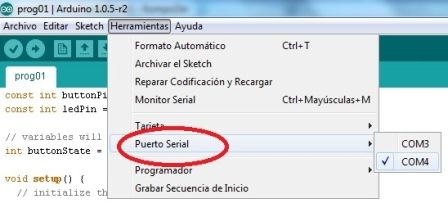 |
| Third, we must select the type of programmer: "USBtinyISP" | 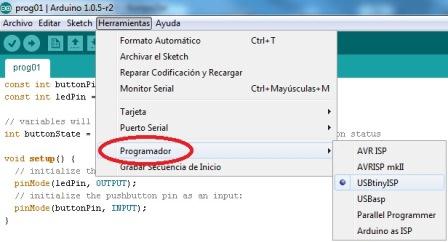 |
 |
|
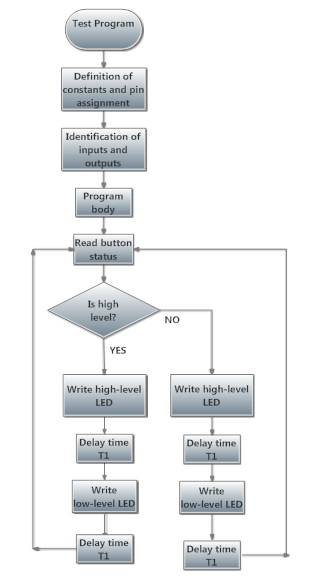
| The program structure is shown in the following flowchart. | The program in Arduino |
 Click over the figure to see the video
Click over the figure to see the video| 1. Download ardublock-all.jar | Download link: http://cloud.github.com/downloads/taweili/ardublock/ardublock-all.jar |
| 2. Location of the downloaded file | Include
all.jar ardublock-file in the tools folder of the Arduino IDE ".... /
arduino-1.0.1/tools/ArduBlockTool/tool/ardublock-all.jar" You must create folders: /ArduBlockTool / tool / |
3. 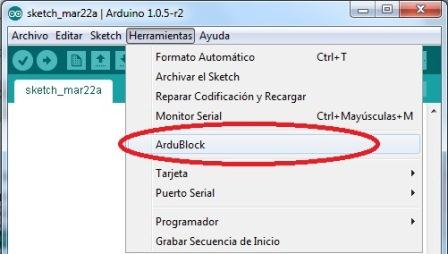 | After installing and open the Arduino IDE in the "Tools" menu you can find the link to Ardublock |
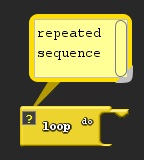 | To start programming charge a loop block. |
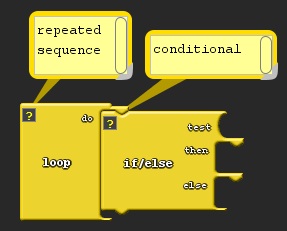 | We link to the previous block to the block conditional "IF", which has an active input condition, when the input is true (in in this case reading the input pin 3), the block performs the action in the part "then", if the result is false the block performs the action in the part "else". |
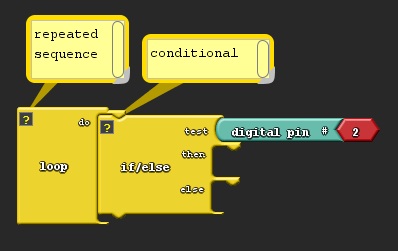 | Input 3 gives the initial condition. |
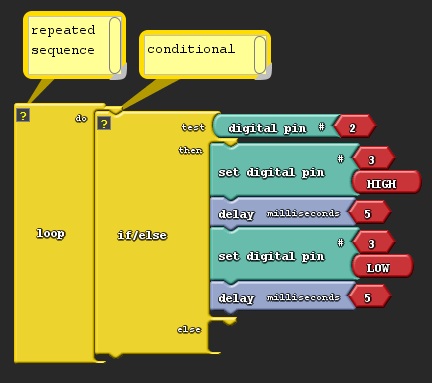 | If the condition is true, it performs the power on and power off of la LED with a time delay of 5 milliseconds. |
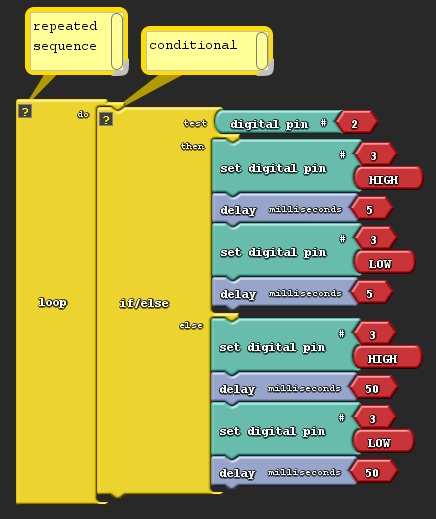 | If the condition is false, it performs the power on and power off of la LED with a time delay of 50 milliseconds. |
 | To download the code to the ATtiny44 I used the button "upload" which translates the graph code to the Arduino code. Click over the figure to see the video |