Week 15 Mechanical Design
by Moritz Begle
Posted on May 20, 2013 at 15:00 PM
Sliding System
The aim of this class assignment was to work on the mechanical design of your system. The content of the class can be found "here"
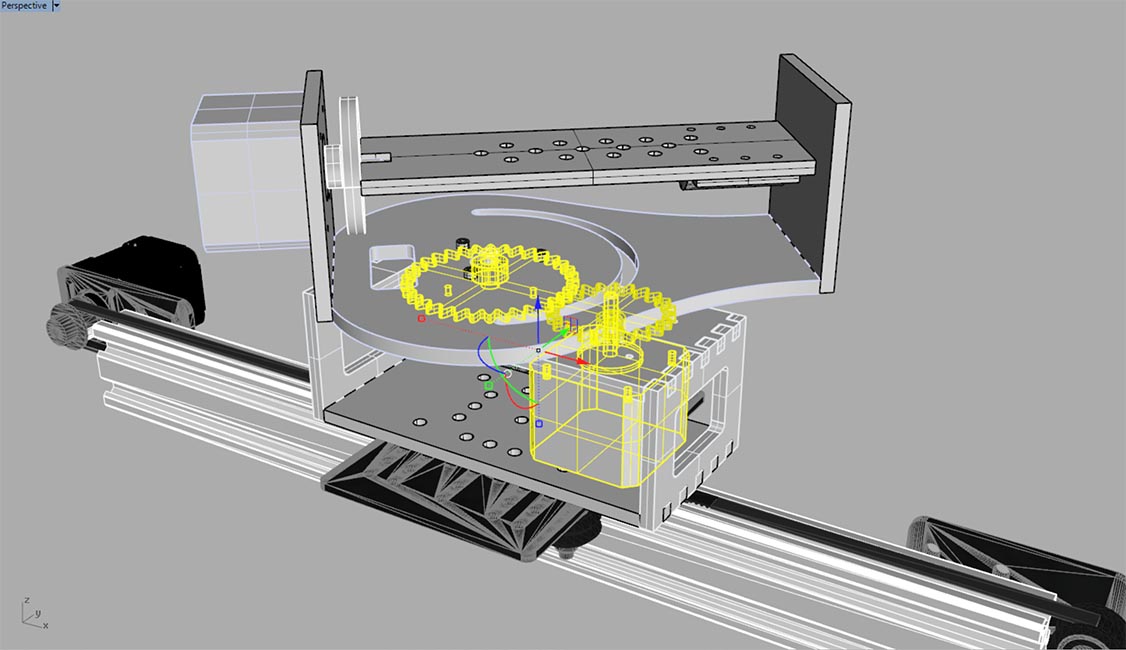
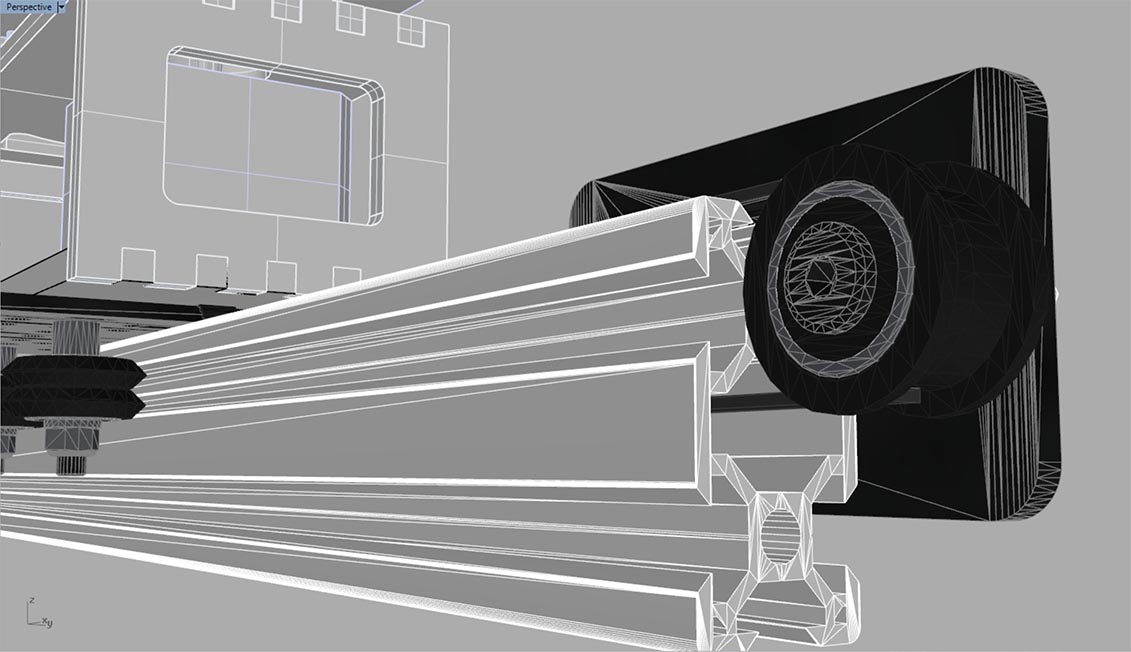
The overall system will run on a rail (20x40x1500) driven by a Steppermotor. The Belt runs through the rail in a loop connected to the platform on both sides.The wheels will be fixed through a lasercutted plexiglass rectangle mounted to the rail. The camera can rotate around 180° and pan 270°. The advantage of using a rail is that it also can be mounted on tripods which adds another rotation point to it.
 Gears
Gears
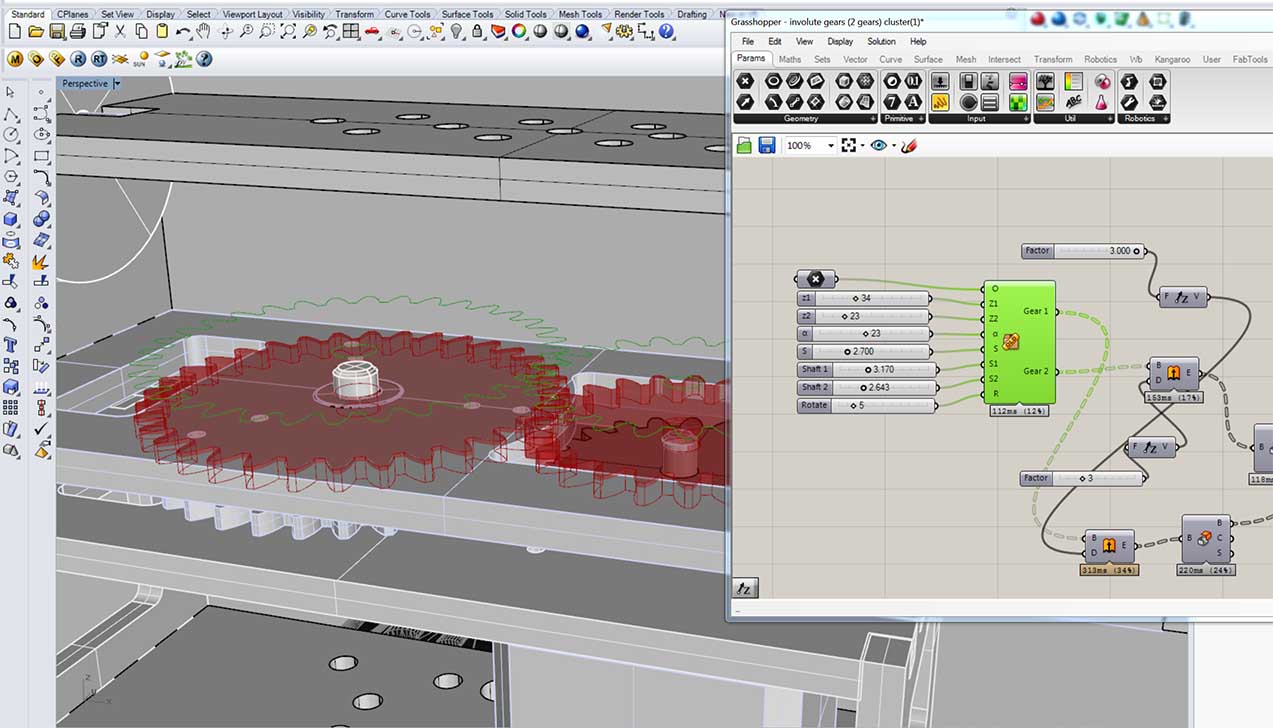
The Gears had been created with a grasshopper definition that can be found und this "link" and will be 3dprinted or lasercuted which depends on the resolution i can achieve with the 3D-printer.
The secondary gear will be fixed with 3 screws to the upper level not only to distribute the forces but also to regulate the distance inbetween the upper and lower part. Underneith the gear the gear washers take care of minimizing the friction inbetween.
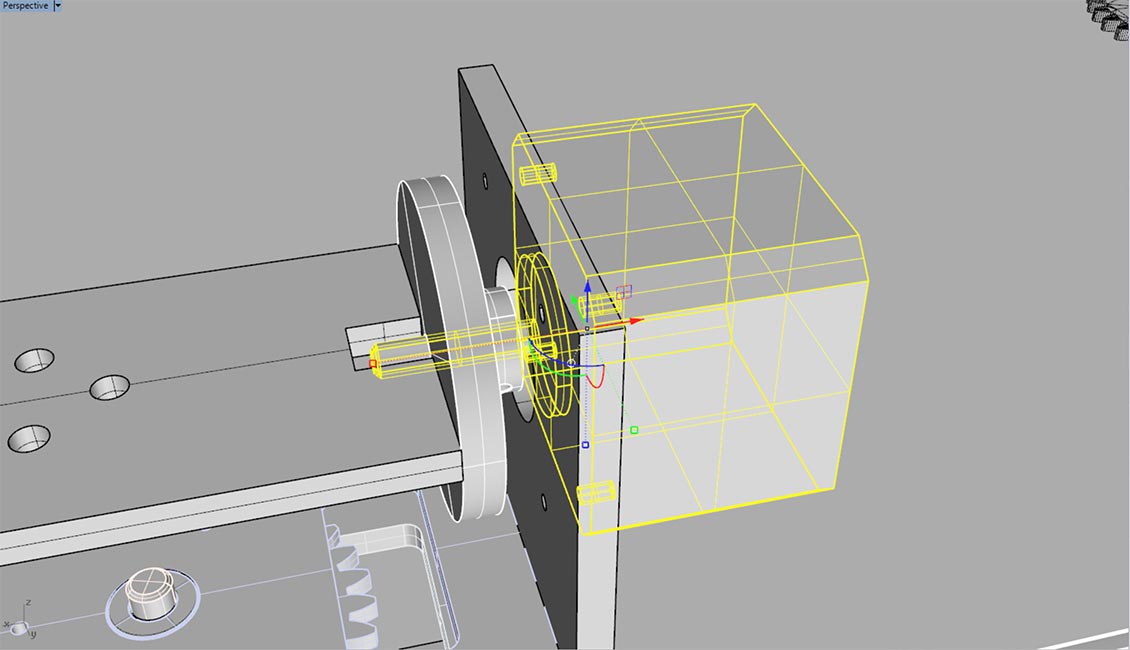
 Nema 17 Stepper Motor
Nema 17 Stepper Motor
This little motor packs a powerful punch at 76 oz of torque! A circular plate is connected directly to the stepper connectin the tilt plate
Blog Search
Keywords
Web development; blogs; content management; videoconference;remote dektop; project management