Group assignment
- design a machine that includes mechanism+actuation+automation
- build the mechanical parts and operate it manually
- document the group project and your individual contribution
Cablebot - Cablebot model has been made with the vision to solve the challenges of farmers with the large farms. Sowing seeds, watering and other acitivities on large field are challenging . Our model is the first step towords automation in farming using "SKYCAM" Principle.
Brain storming
Then we started to think how can we make a better version of this. One limitation which wanted to overcome was the fixed size of farmbot machine. In brainstorming session, one of our team suggested Spidercam like cable driven machine. This way we could scale the system to real large farm fields of for many agricultural automation, ranging from seeding, monitoring, watering, weeding etc.

Machine Description
In this week we are going to make CableBot
This is the first of two week make a machine project. This is the combination of two assignments. Previous fab academy students are worked on various XY plotters. Hence we decided to do something new for learning purpose.
We are making CableBot for Agriculture Automation
This project is inspired by FARMBOAT and skycam. We will be using 4 cable to move the end effector. We are using 4 stepper motor and winch,motor controllers in serial bus to achived the motions.

We are making two end effector one for watering and other for seeding.
Individual contribution
We first start the design, how actually we will start, what type of materials we will used. Most importantly the motor and how much torch will be this motor. Manoj make a calculation initially and he share with us and we also add some comments on it.
After Machine discussion we assigned work individually.Tushar and me worked on Design.
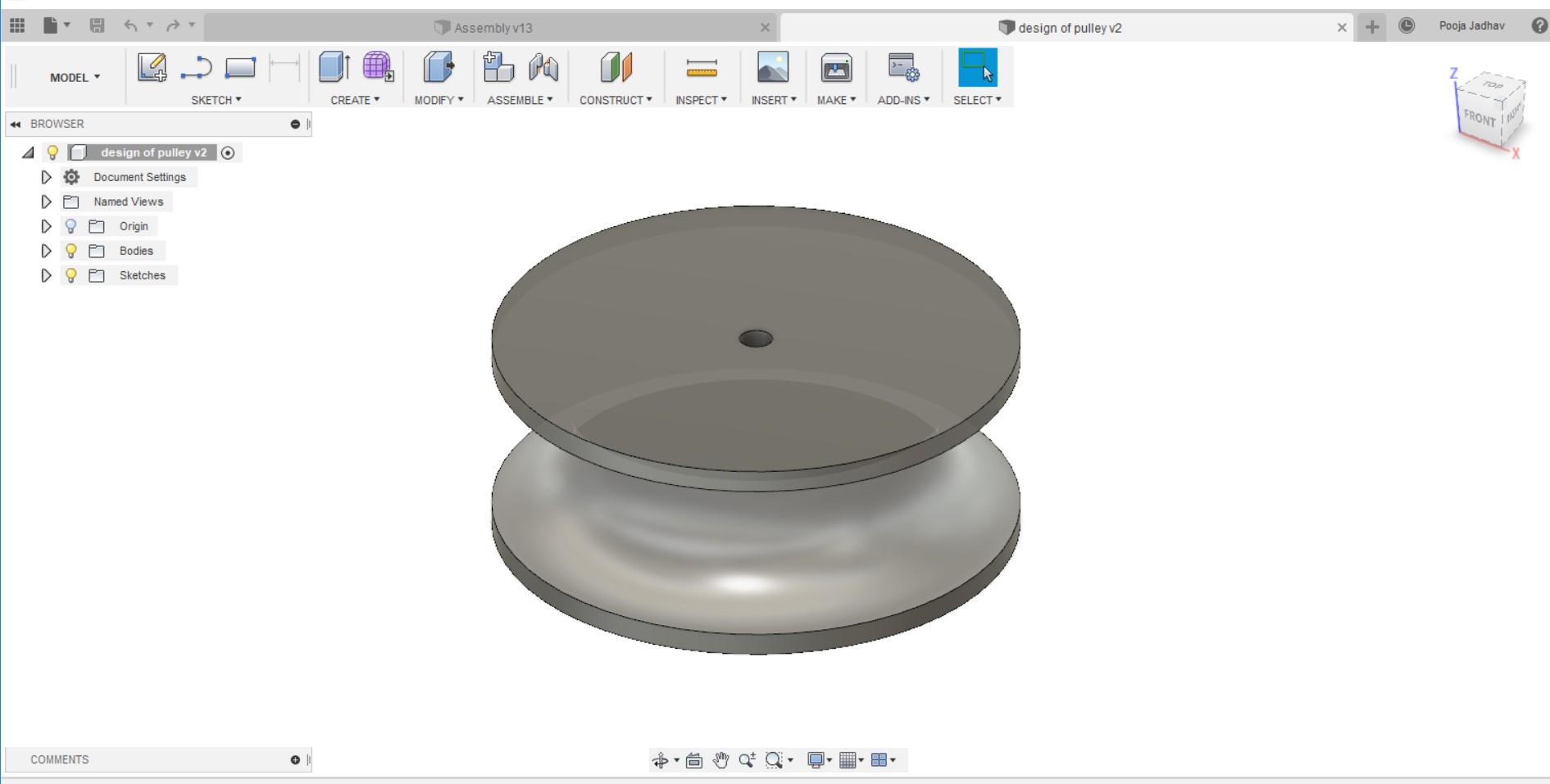
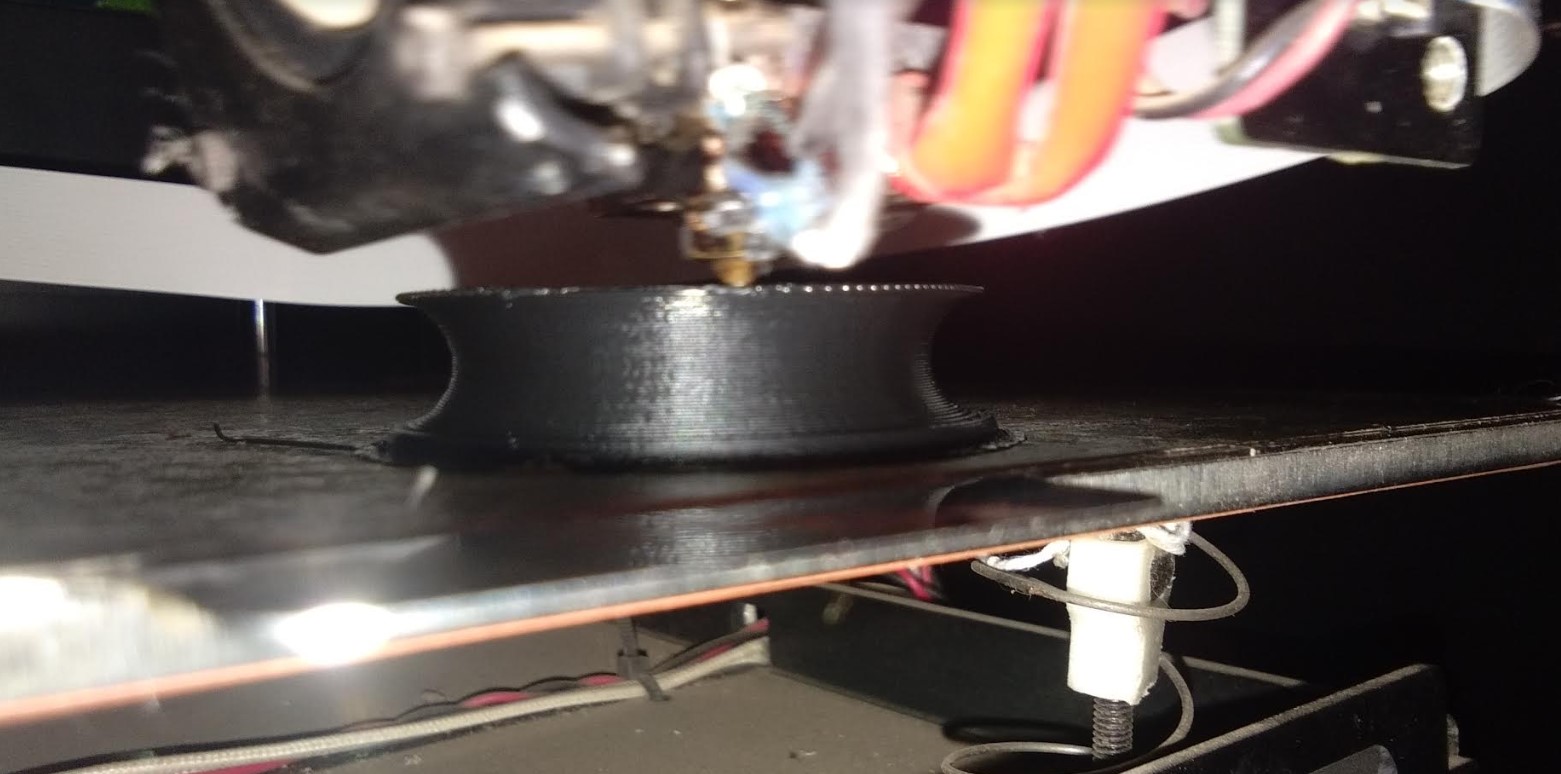
Firstly I made simple pulley design.
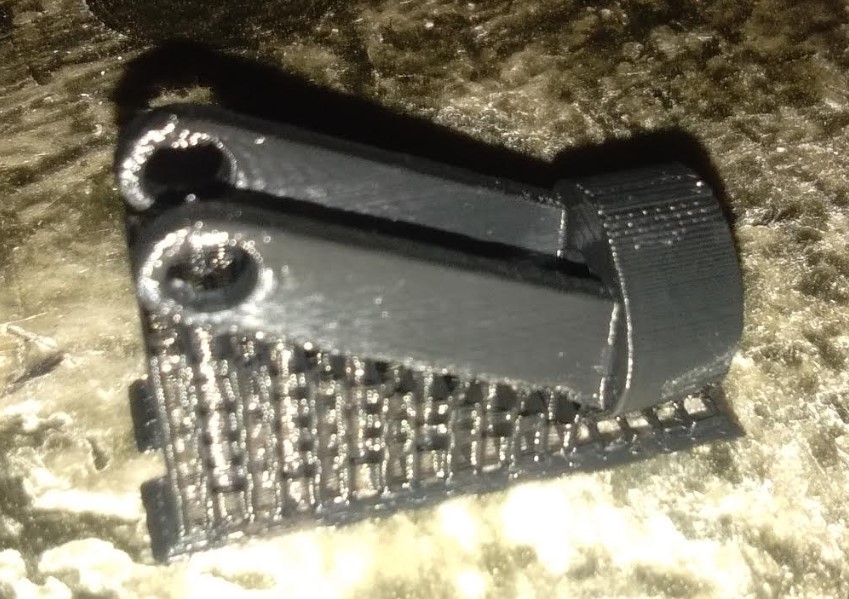
And also I printed it.

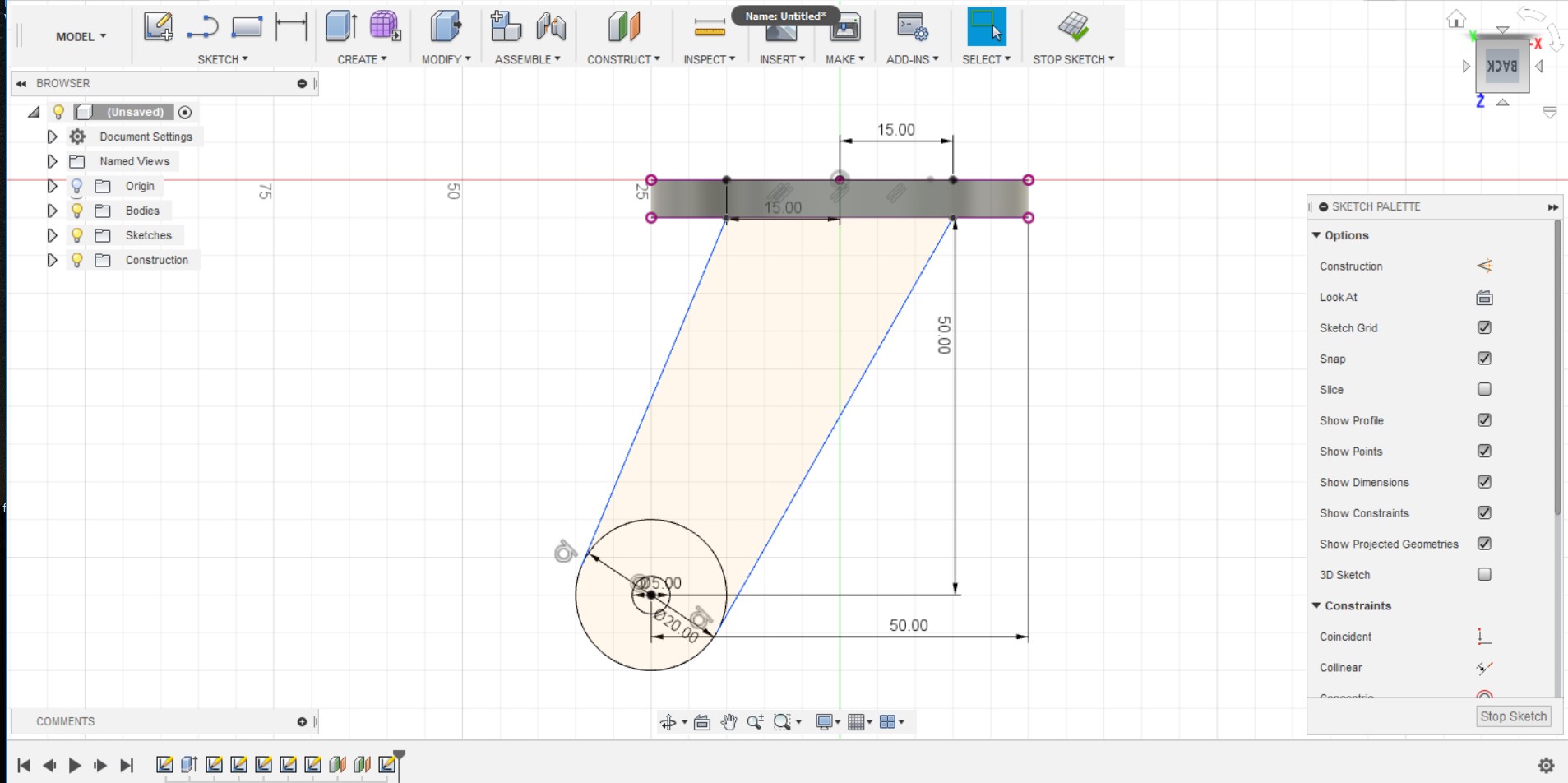
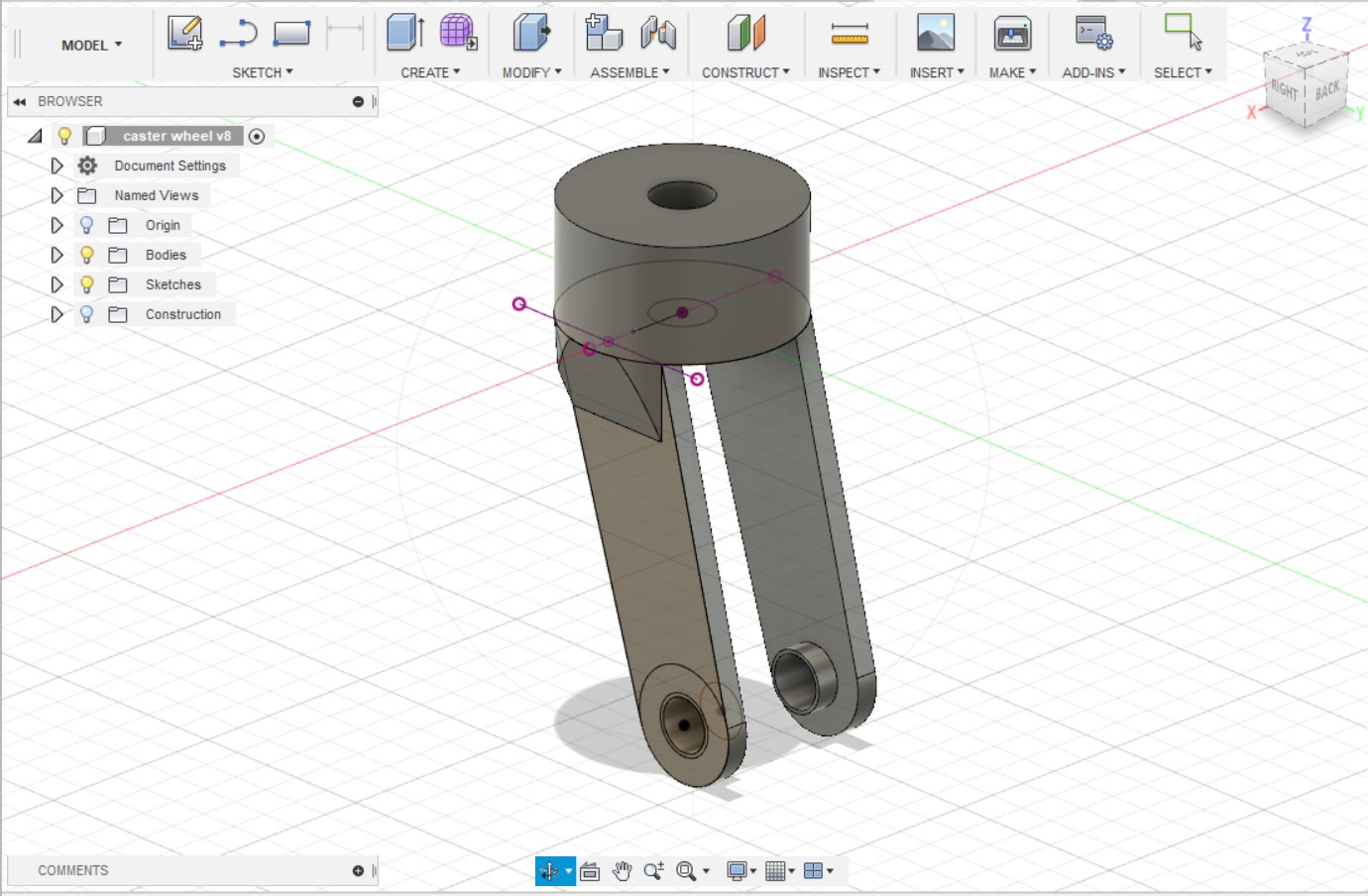
We used the metal pipes.When I designed I thought about how to attach pulley on pipe and other is how to rotate pulley in 90 degrees . Mixing of two issue I decided try to make swivel pulley design
Then I printed it
For this printing, I chose the following parameter to print fast.
parameterI used same parameters for every printing design which are used in make a machine.
We holder our pulley and motors on circular pipes. for the pulley support I designed the base part which are fitted on 4 pipes
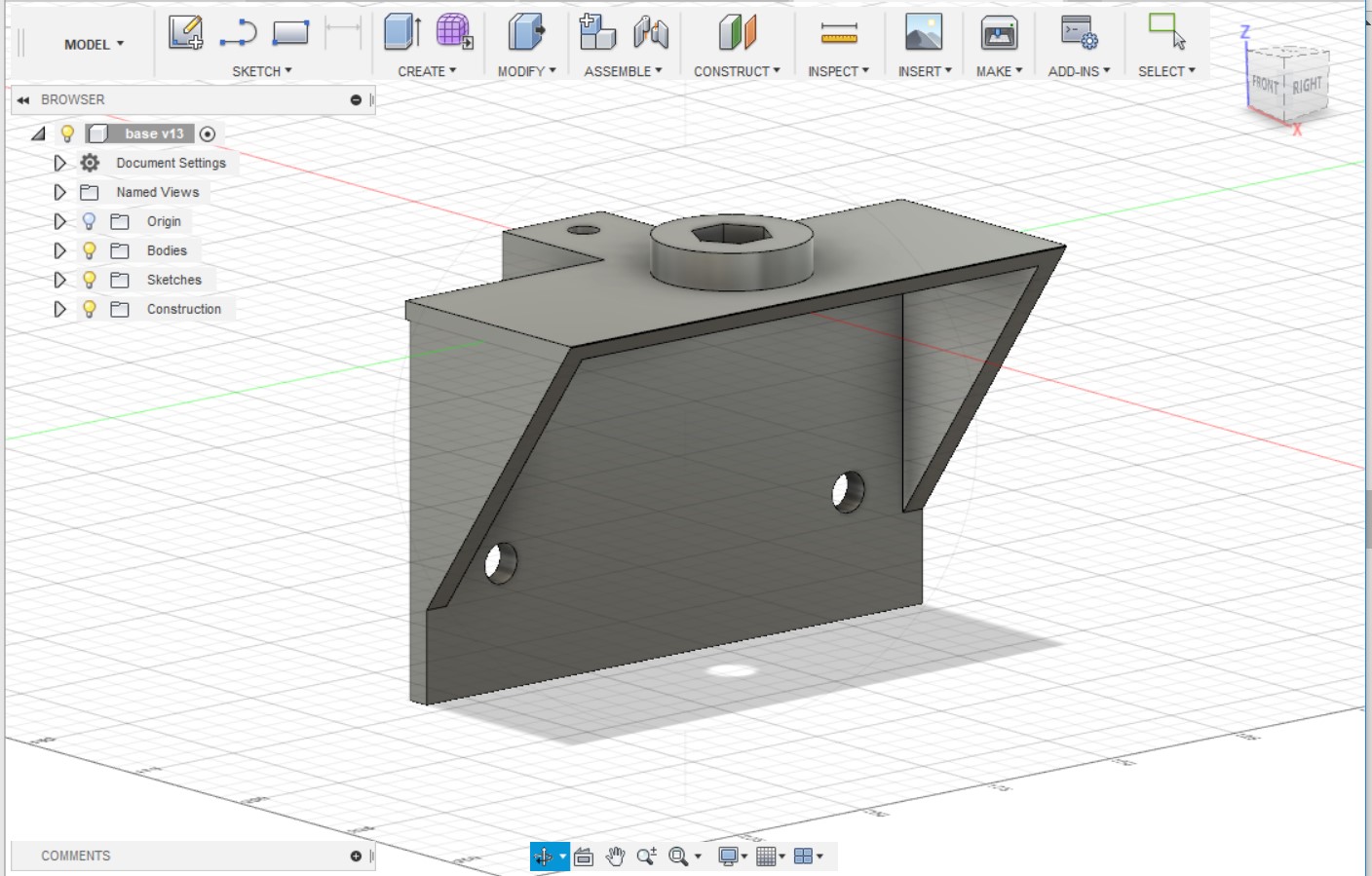
then I printed it. Base part fitted on pipes using clamps. After printing I realized distance between two clamp hole is not suffieient that why clamps are not fitted on pipes very well. And also this part take a more time for printing. We don't have enough time. So,I made 2D design for base part and cut it on Laser.

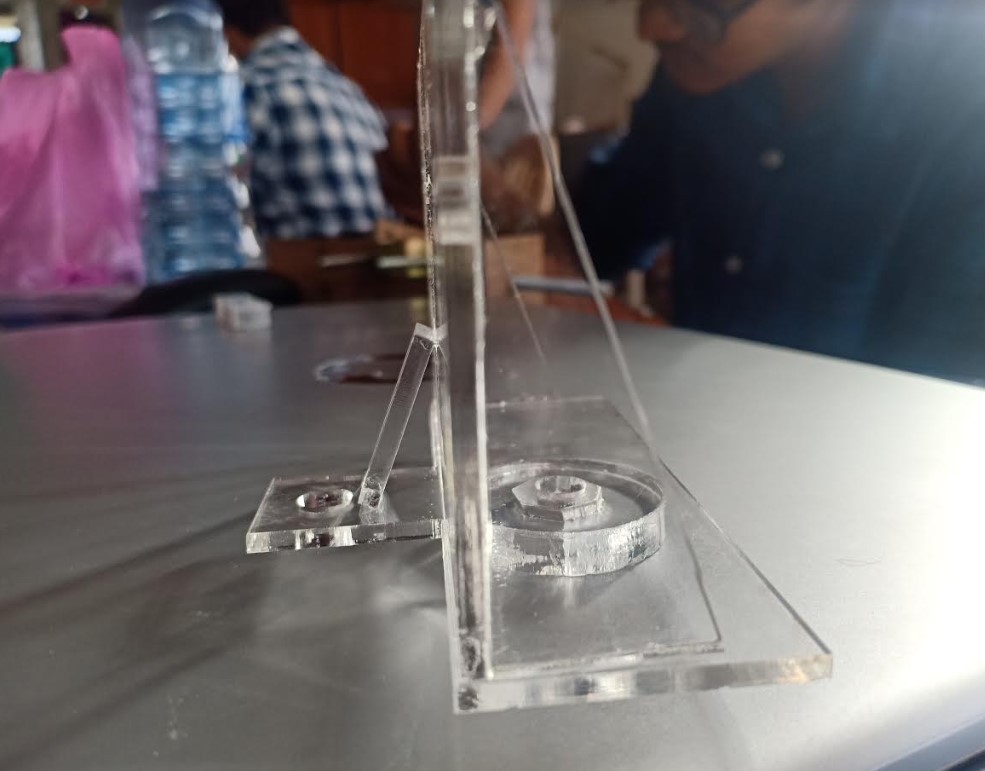
laser cutter part is look like this
This is my printed parts for 4 poles. I printed 4 pulleys. And assemble it.

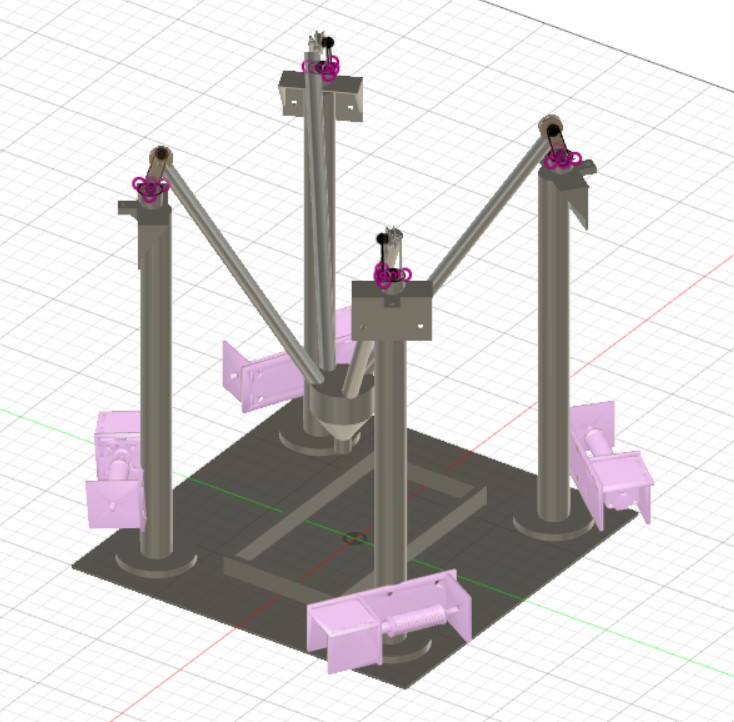
I tried to made model assembly in fusion 360.How it looks.
our team searched plywood. Its 3 X 3 feet.then we marking on plywood. We purchased metal pipes and flance,nutbolds


then we did holes on plywood using drill machine.

then we assembles rods on


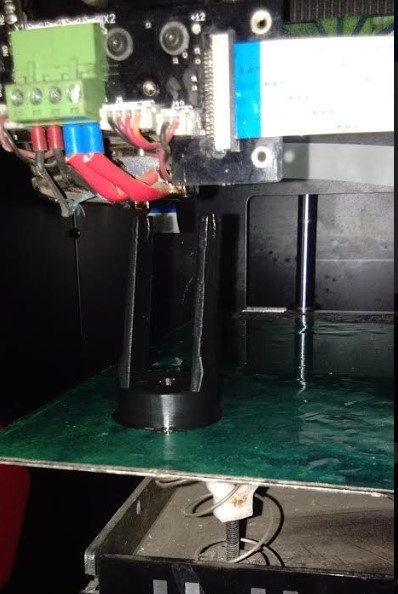
After printed my first pulley design we tested it on pole.

After joining parts of pulley.it looks like this on pole.but we have the problem.its not move on 90 degree beacause our model is based on skycam mechansim. and one more problems understood was pulley is not roll flexibley.then I rechanged in my pulley design. Firstly I changed the dimension in rotational circle.
I assembled pulley parts using nutbolds.

Base part took a 2.15hr time for one print. Then our instructor suggest us base part cut it on Lase cutter. that time we worried about that acryalic sheet will be able to taking load of Motors.
But it work

After assembled my pulley design, I help to my My colleague tushar in cutting and assembling part.our team members help me to assembles all pulleys winch it on poles.

|

|
Then Our model is looking like this...

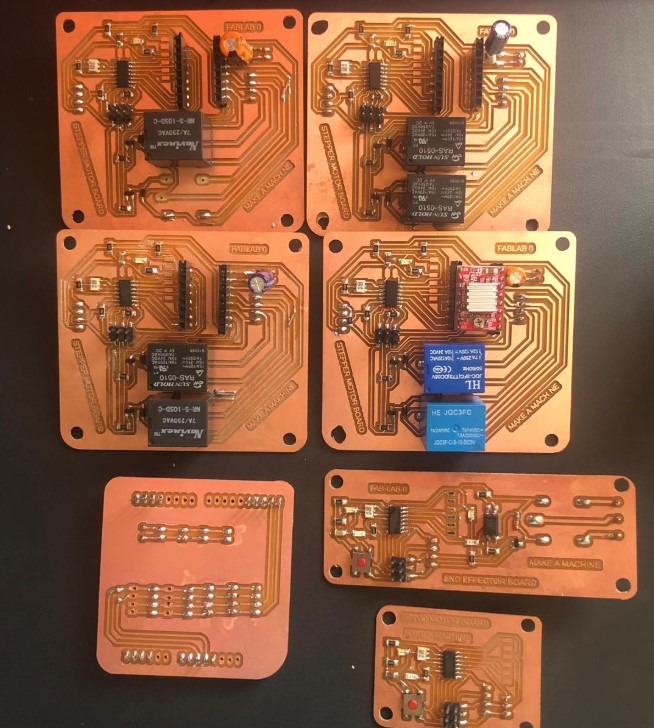
My colleague Aditi and Jaydeep was worked on eletronic part
They are going to use Master-slave type of communication for controlling whole system.They are using Arduino -uno as our master board and we made slave boards by own.
Vaibhav was worked on End effector.he was designed two end effector first is seed planter and water sprinkling.but 3d printer get 2 days for printing, and don't have enough time.
For short time we used bottle. Anand cut the bottle in half and designed for hold the bottle and cut on laser.
We are using Rope.


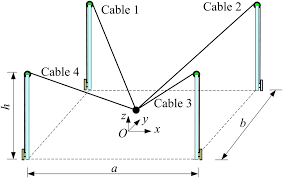
Manoj was worked on Control system.
Manoj did the math to determine the cable length as well as cable tension at given X,Y,Z. This was used in control system and stepper motor selection for actuation.
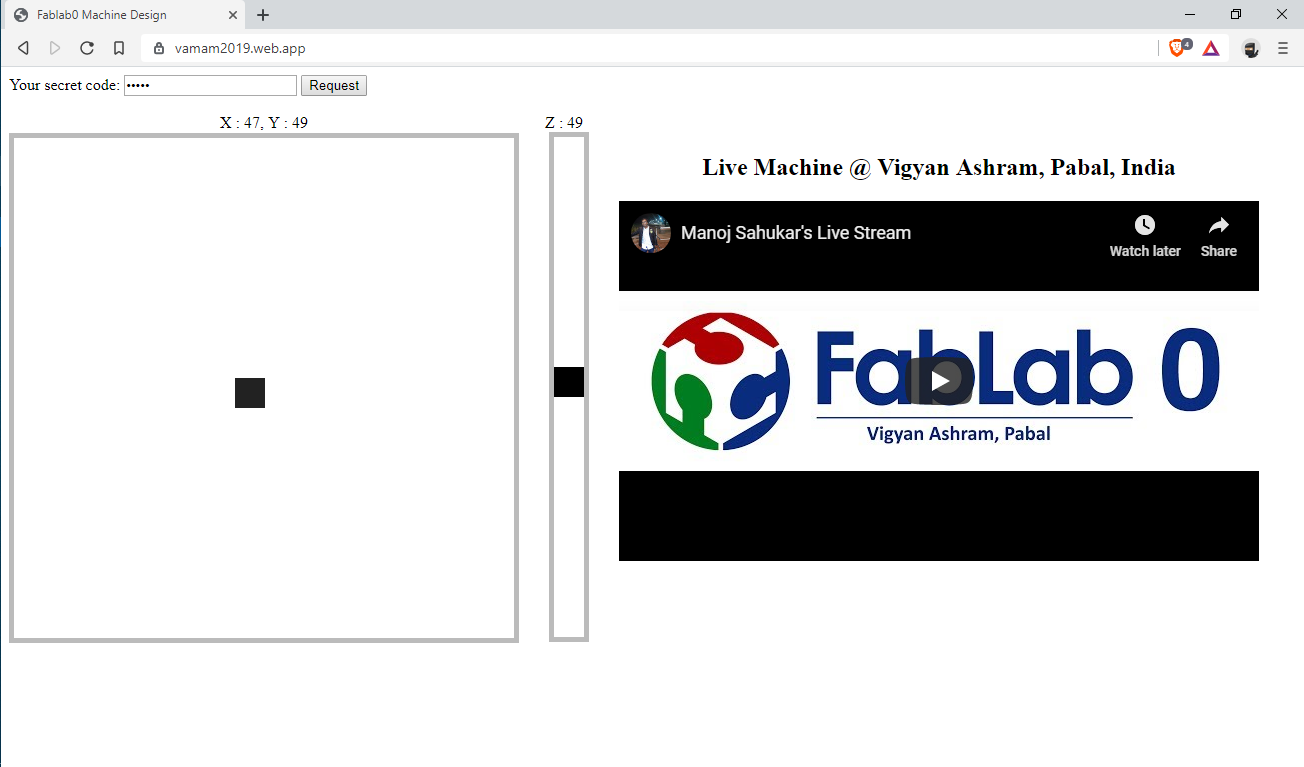
he developed tool which is control interface from anywhere.
Link to control interface: HERE
After Assembly and control system.We are taking trials
Final video of Make-A-Machine
You can Download stl file
This is our Group page link for more details visit this site.
Learning Outcomes
After two weeks of group project.I learned more thing in this assignment. More thing is how to work and communication in team. Then how to work Design,planning and building a system simultaneously. how to face errors and then find solutions. So,I really enjoying this assignment with day/Night Working.