Recaptulating Older week
We were working on 3 machines-
Hectors assembly was Made but the electronics were to be out sourced and we are still at developing stage for the automation of the hector
For the motion the main focus was to learn to operate or interface stepper motors,with the drivers and ramps.
Ramps testing from Ahmad Ali on Vimeo.
Updates On Hector /Challeneges
MTM Snap Updates
The first thing I tried was to move the stepper motors and learn How it works-
My role was to work With Rajat Sir helping him Out in the electronics and to debug the codes and learn about GRBL firmware.
We had very less time for the presentation so we took a pace in our work..
So I started with understanding the working of stepper motors. Then I moved ahead towards its drivers. After this i learnt about interfacing both of these components with arduino and then finally learnt about RAMPS board.
I learned that the steps are actually the motion of the rotor in the coils and its 1.8 degree per 1 volt.
But it's accuracy can be achieve by using the microstepping, and usage of motor drivers, as the stepper need oputput supply.
Actuation
After going through some pages over the internet i got to know that there are many ways to actuate a stepper motor like it can be actuated using ULN 2003a(Darlington pairs) IC or through L293D Motor driver IC or using A4988 Motor Driver. A lot of people have faced heating problems with ULN2003 and L293D do I first learnt about A4988 Driver IC as its not that expensive and was available in Lab . So here’s a video I refered for understanding and using A4988 driver IC with Arduino.
* https://howtomechatronics.com/tutorials/arduino/how-to-control-stepper-motor-with-a4988-driver-and-arduino/
* by Dejan Nedelkovski, www.HowToMechatronics.com
*
*/
// defines pins numbers
const int stepPin = 3;
const int dirPin = 4;
void setup() {
// Sets the two pins as Outputs
pinMode(stepPin,OUTPUT);
pinMode(dirPin,OUTPUT);
}
void loop() {
digitalWrite(dirPin,HIGH); // Enables the motor to move in a particular direction
// Makes 200 pulses for making one full cycle rotation
for(int x = 0; x < 200; x++) {
digitalWrite(stepPin,HIGH);
delayMicroseconds(500);
digitalWrite(stepPin,LOW);
delayMicroseconds(500);
}
delay(1000); // One second delay
digitalWrite(dirPin,LOW); //Changes the rotations direction
// Makes 400 pulses for making two full cycle rotation
for(int x = 0; x < 200; x++) {
digitalWrite(stepPin,HIGH);
delayMicroseconds(500);
digitalWrite(stepPin,LOW);
delayMicroseconds(500);
}
delay(1000);
The Working of Motor
Understanding GRBL Firmware
Source~ Instructables
GRBL is a firmware for arduino boards(uno,nano,Duemillanove) that controls stepper motors and spindles/lasers. GRBL uses gcode as input and outputs signals via the arduino pins.
Most industrial cnc machines uses parallel port controller that requires Those big purple connectors. Because GRBL arduino boards you just hook it up to a free usb port.
Grbl is compatible with all atmega 328 based arduino boards, meaning that you could use a uno or a nano but not the mega as its atmega 2560 based. The arduino mega is used in alot of 3d printer because of its more powerful processor but because of the relatively easy tasks of a cnc mill the arduino uno is enough.
To drive stepper motors you need some sort of driver. Some popular choices are a4988 and drv8825 for small motors like nema 14 or 17, but should not be used with more powerful motors like nema23 and higher. Its a good idea to stay clear of the easy drivers.
To connect your motor drivers and arduino you can use a pre-made board like the popular arduino uno cnc shield or build your own.
Here We use RAMPS
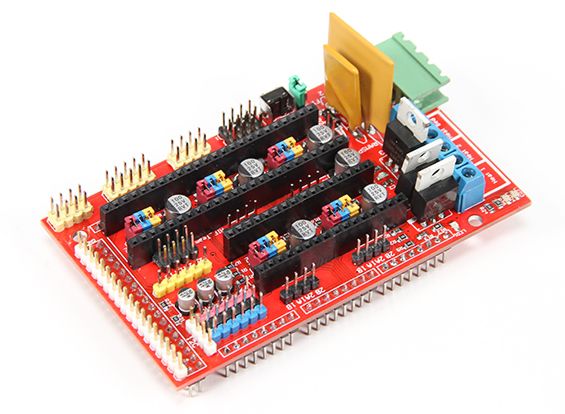
I followed this video to get a better Understanding
Detailed Interfacing-
For detailed understanding of ramps I referred this document-
https://www.reprap.org/mediawiki/images/0/06/RAMPS_dossier.pdf.
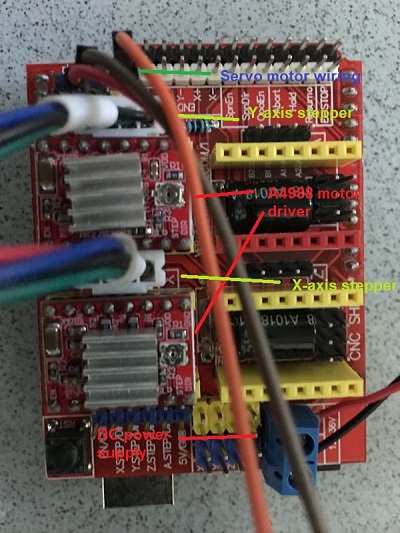
Testing ramps
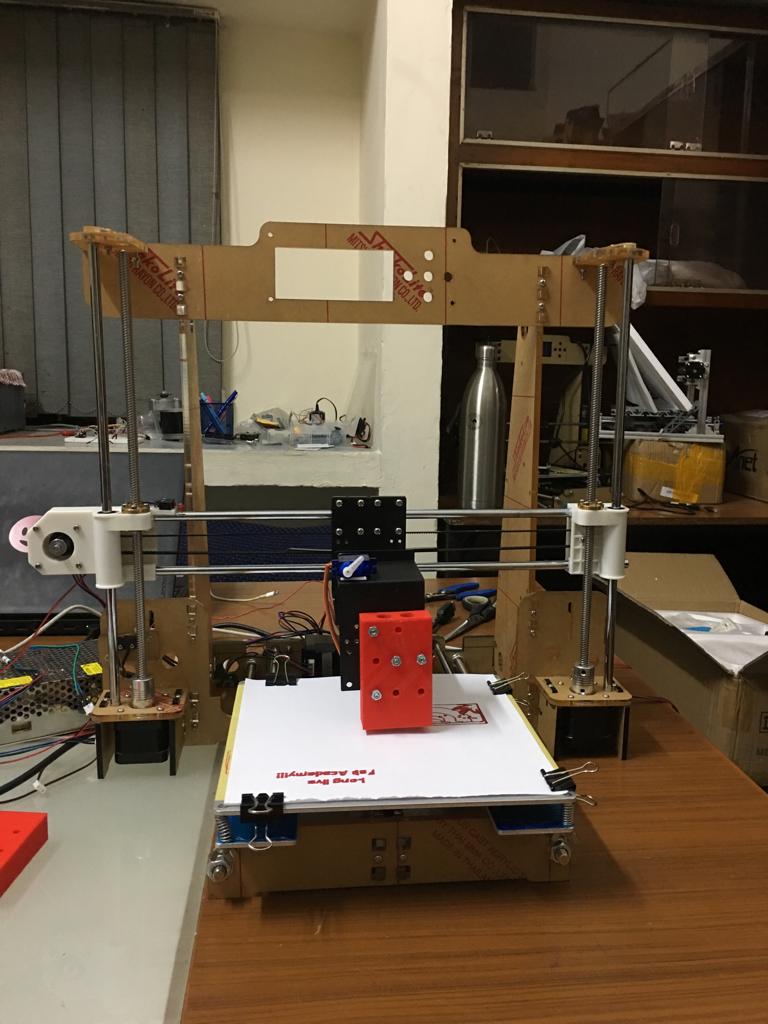
Wroking Of MTM with One Steeper Motor roatating the Linear Rod
Issues with the MTM Snap
Although Individually the motors was able to move the assembly but By the action of Load the assembly started drawing a Lot of current and the precise motion was not achieved. Both the blocks were unable to move simulatneously. The cause was that in Nadia's Assembly everything is made up of cardboard so there is very less load on the moving blocks on the linear rod, in our case it was mdf and also we didn't use any linear bearing on the other block we were just dependant on one Stepper motor with a rod assembly which was unable to do the work.
The issues was figured out but there was a lack of time so we all try and inested on our final presenatble machine the XY Plotter.