Week16
Machine design
second week
Assignment:
"Machine design: how it works"
You can see the complete documentation of machine weeks on the opendot website at this LINK.
video machine OPENDOT from opendot student on Vimeo.
Shoot a ball (Polar Machine) and hit the basket (Cartesian Omniwheel Robot) - MAKING OF from Opendot students on Vimeo.
FINAL RESULT
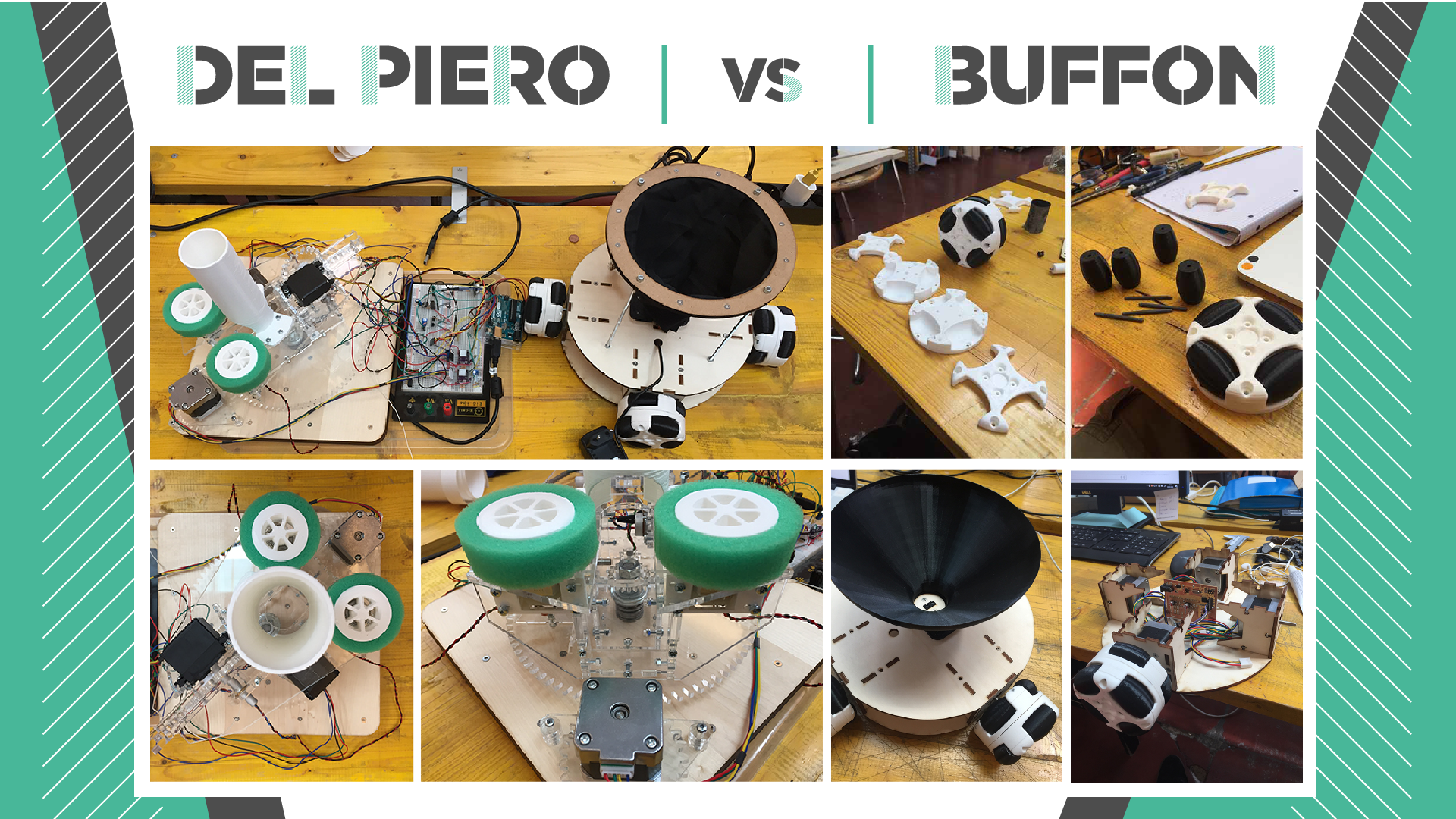
What’s it
Our project is made of two small educational machines, not just related to learning how digital and electronic fabrication techniques work, but also useful within interdisciplinary educational paths, especially regarding STEM subjects such as physics.
We imagine that it could turn into an adaptable and perfectly suitable tool for both playful and educational use, and according to the level of complexity it could be useful for a wide range of purposes.
The interaction between the two machines could be implemented and their versatility lies also in this aspect: balls shooter and omniwheels can work as separate systems or can be connected to create various different educational dynamics. You can see the complete documentation on Opendot Page
Design of interface
This week I focused mainly on the interface part and on the group documentation. With Federica, who took care of the part of the code to integrate the interface, we decided that it would be nice to recreate something that visually recalled the actual movement of the machine.
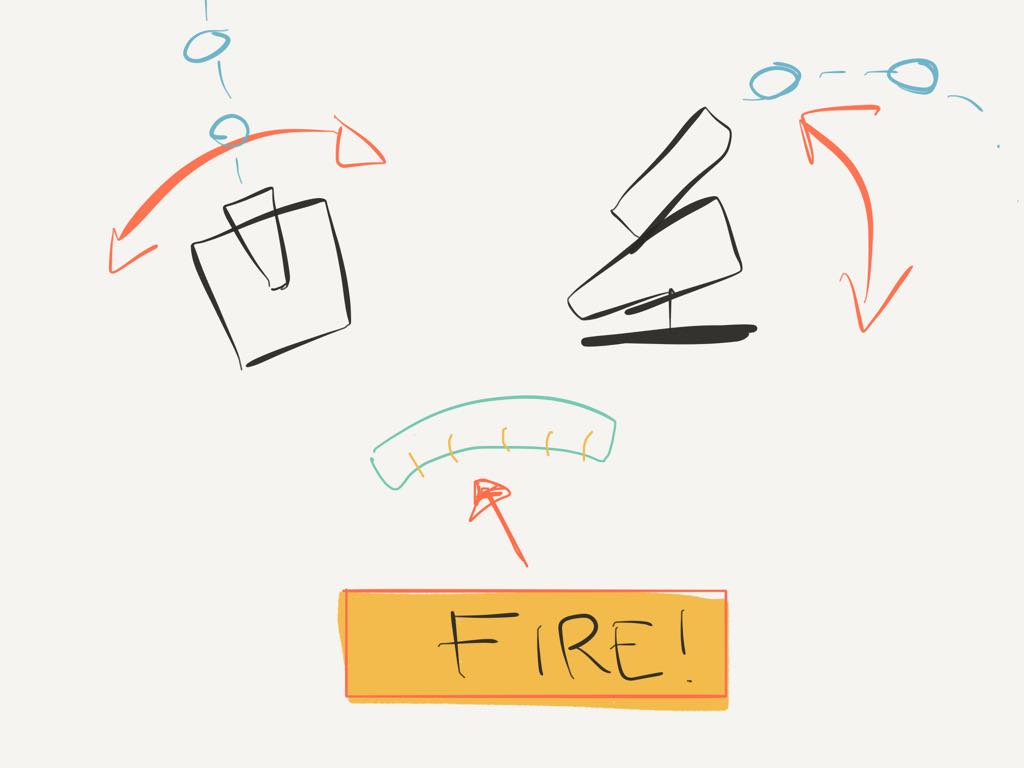
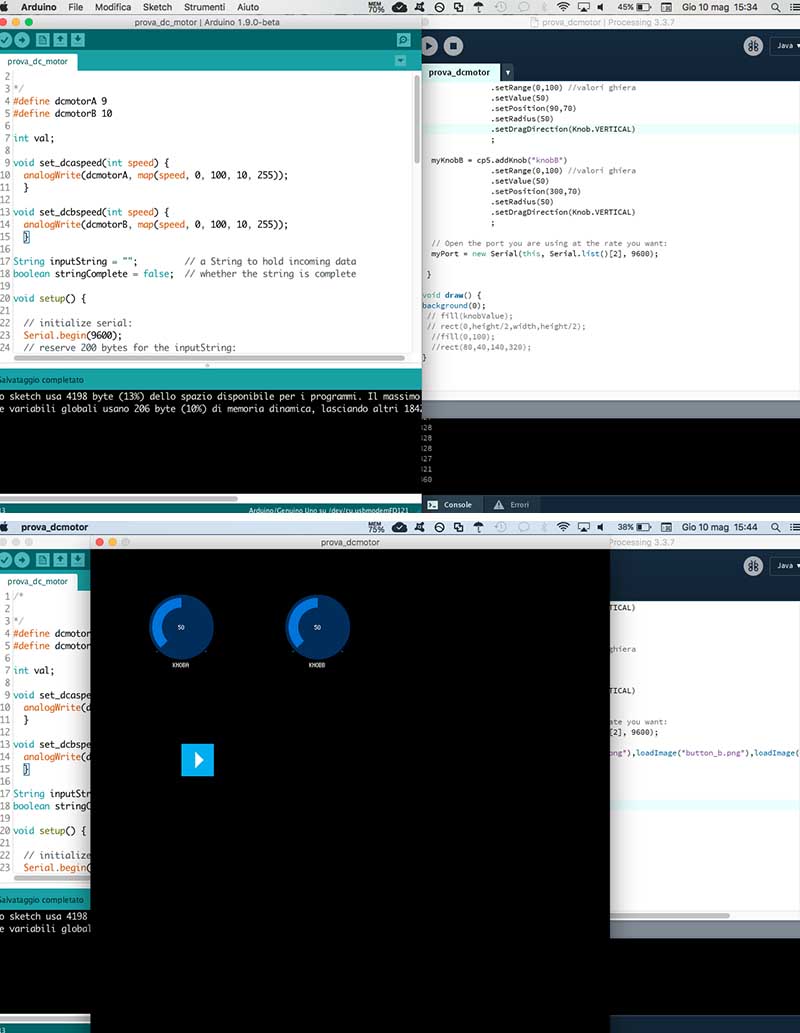
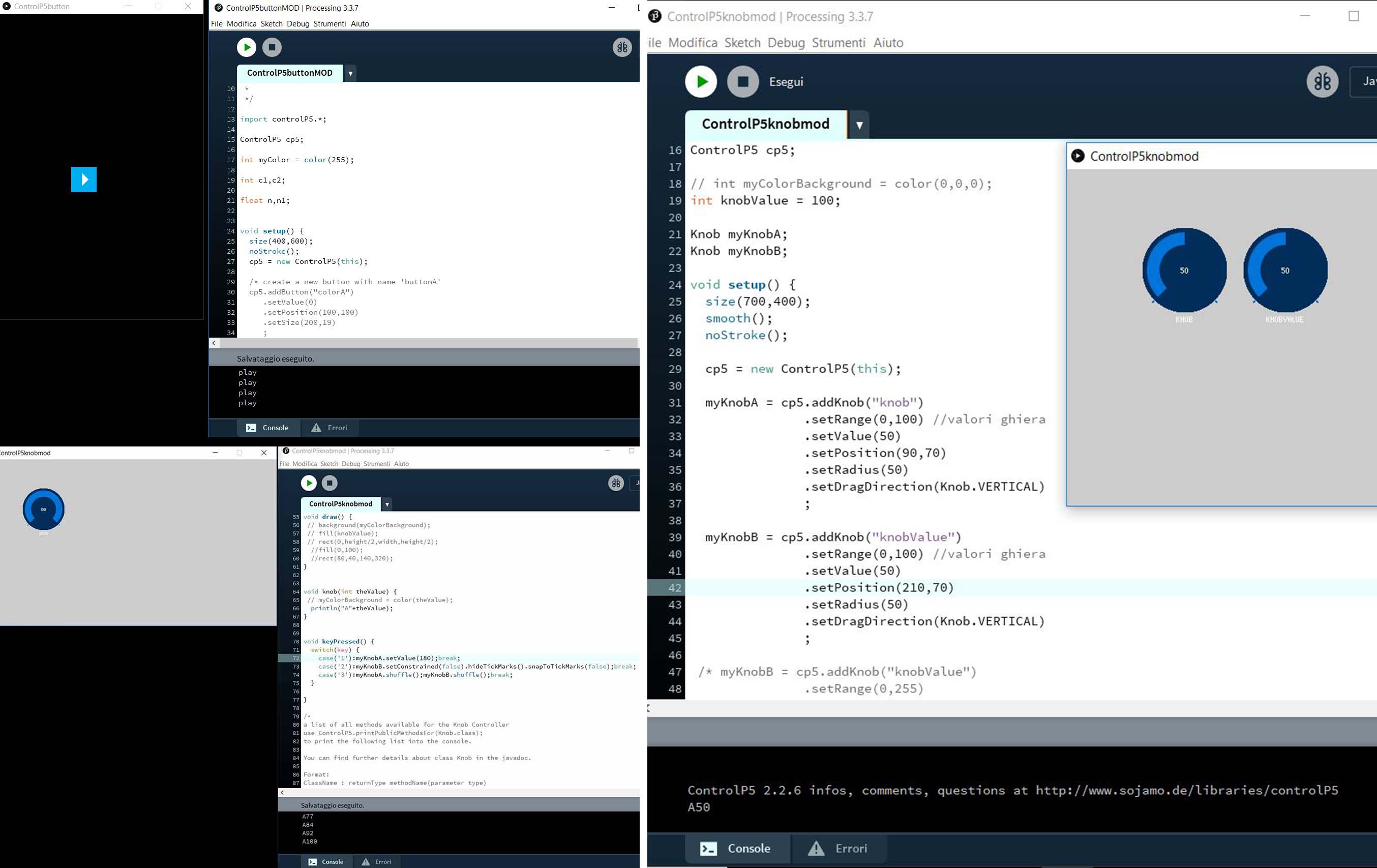
The idea was to draw a silhouette of the machine, in the top view to understand the first movement (right or left), the idea is that the drawing moved, the same for the azimuth, using a side view on the machine this time. For reasons of time we simplified everything because communicating the interface with the code was not as easy as we expected. We started from the library example Control lP5 of Processing. By setting up a serial communication we were able to let our interface communicate with the arduino code. Thanks to the help of Francesco Pasino. We have gone from the integration of different examples and we tried to position them in space for an intuitive use.
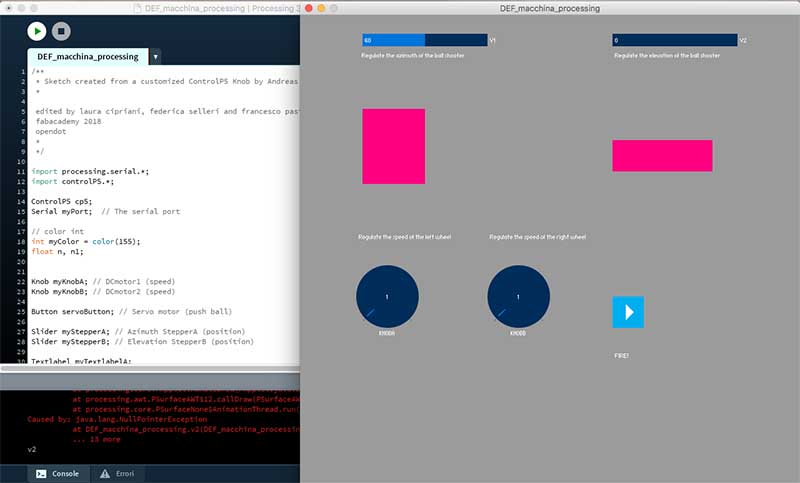
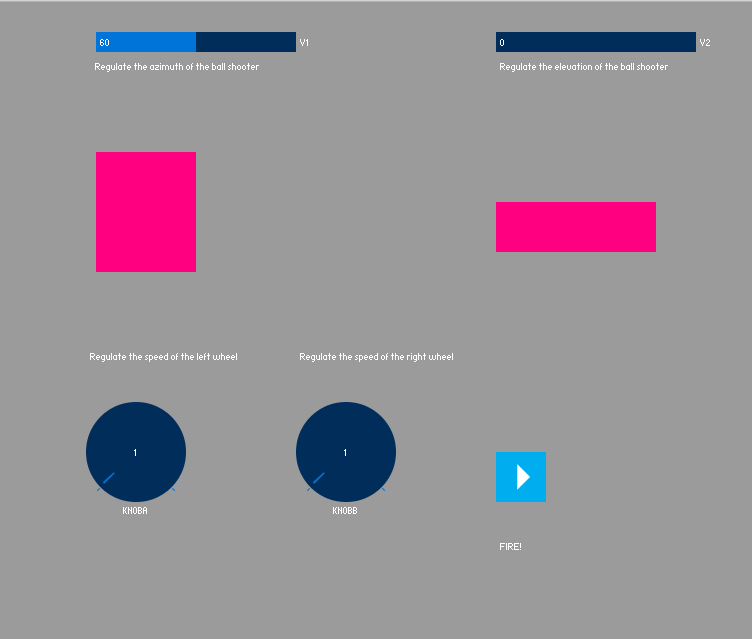
Final result: INTERFACE OF PING PONG BALL SHOOTER:
The shooter interface is divided into 3 parts: the first part is used to manage the two movements of the launch pad: the rotation and the azimuth. The cursors are used to better manage the movement and the rectangular shapes help to perceive the movement that the machine is doing. The angles of movement correspond to those of the machine or from 0 to 120 for rotation, from 0 to 60 for the lift. In the second part you can manage the speed of the discs separately, we have chosen sliders that resemble a tachometer: to control the throw and the speen shoot of the ping pong ball.