In this project, we are a group of seven students: six at Opendot, Milan, and one student at Crunch Lab, San Dona’ di Piave (VE).
We are very excited! It is almost four months we study and practice together and we feel a team. We understand it is a great deal of complexity and a new adventure to be lived together.
By integrating some movement control systems and verification rulers, the ball-shooter can stand as a live experiment to understand and learn the theories of aerodynamic: evaluation of the gunshot, speed, gravity… The interface can become more playful or education-oriented, according to the needs of the user: more control on adjustment, data visualization, launch simulation, etc.
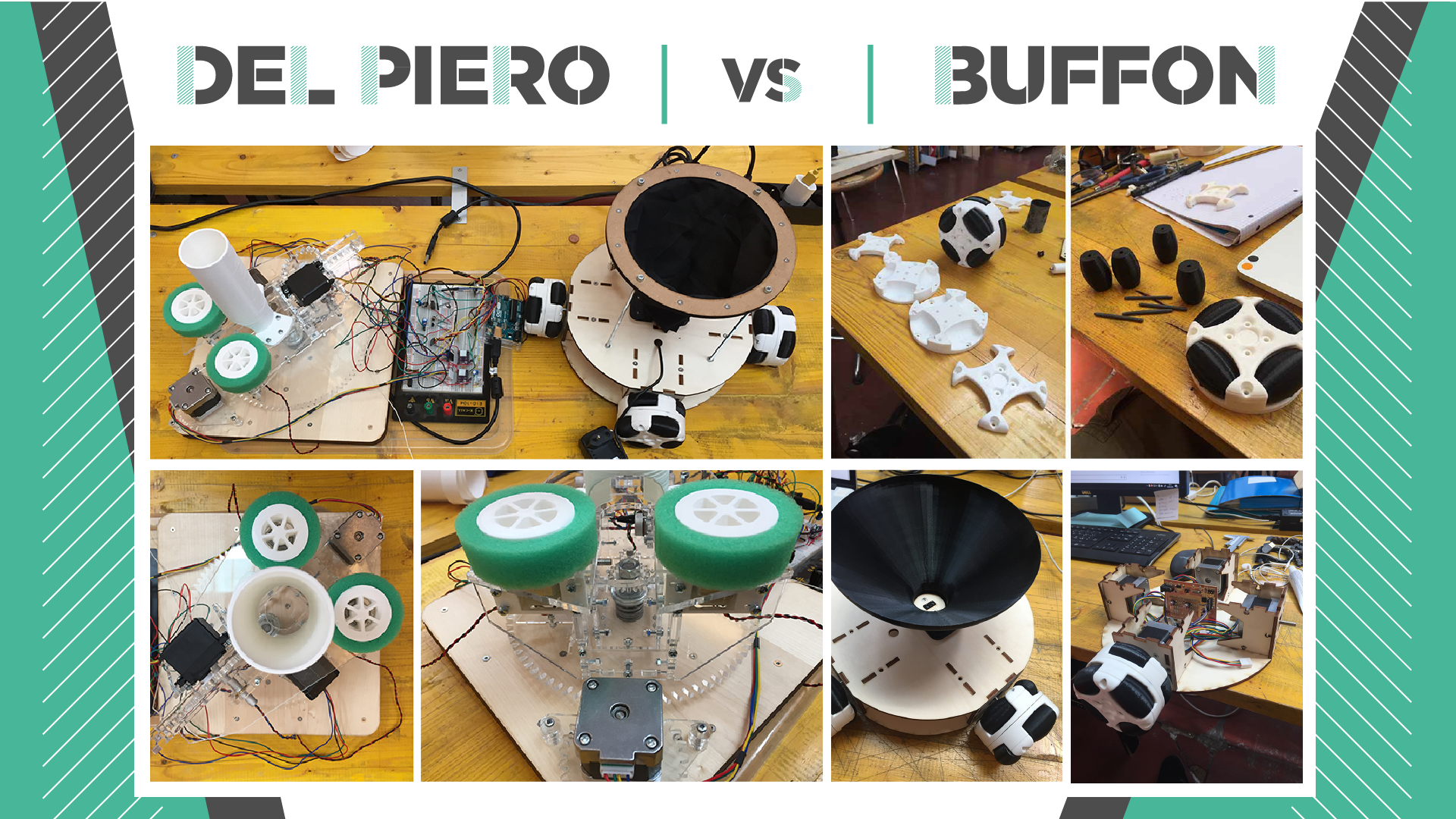
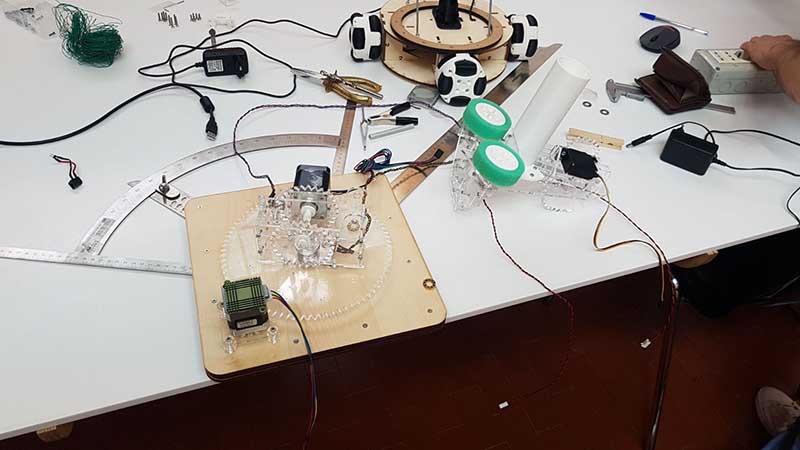
"Shoot a ball (Polar Machine) and hit the basket(Cartesian Omniwheel Robot)"
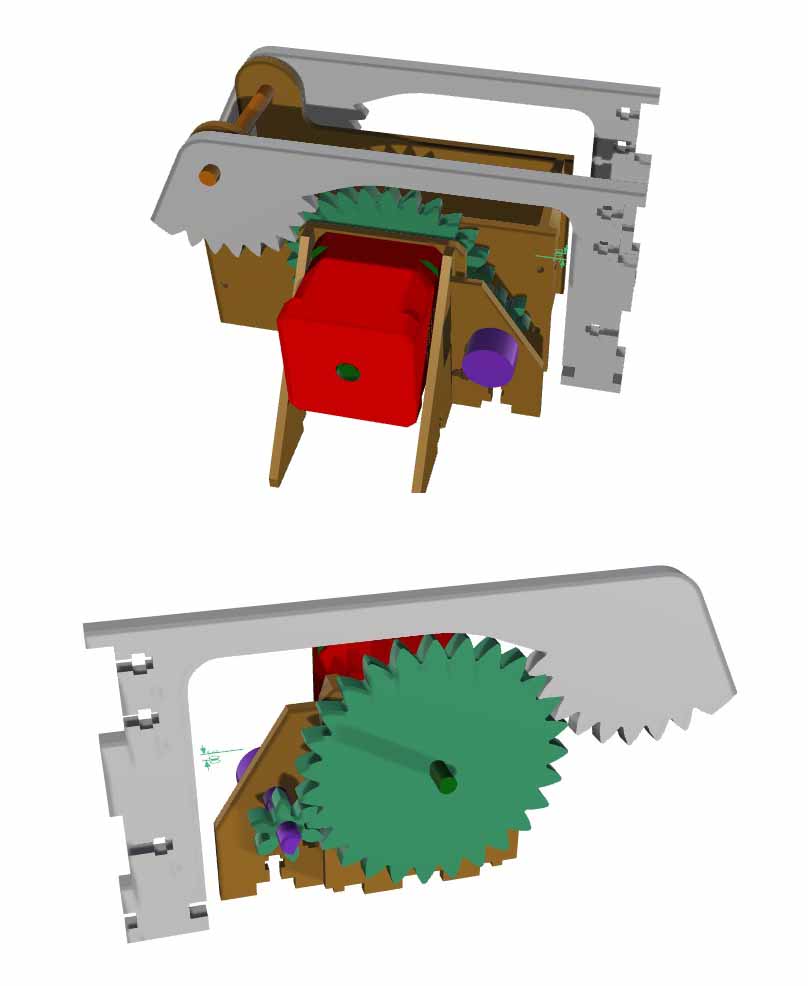


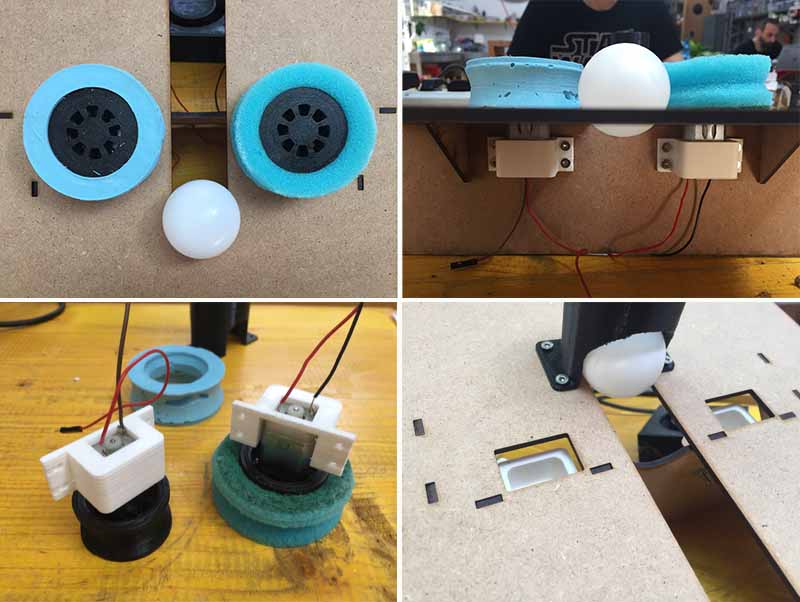
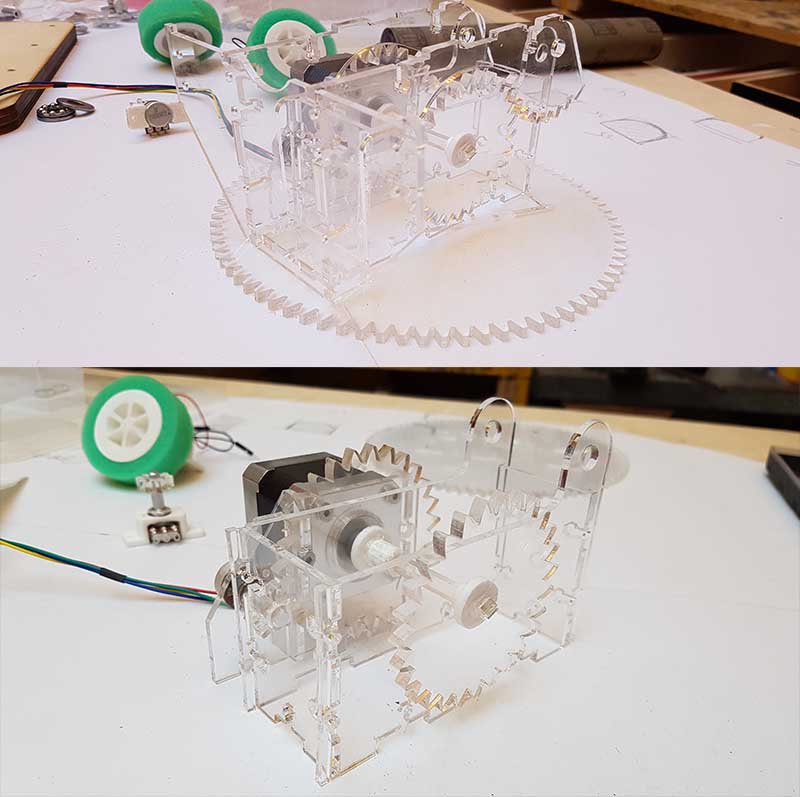
machine design: launch pad test


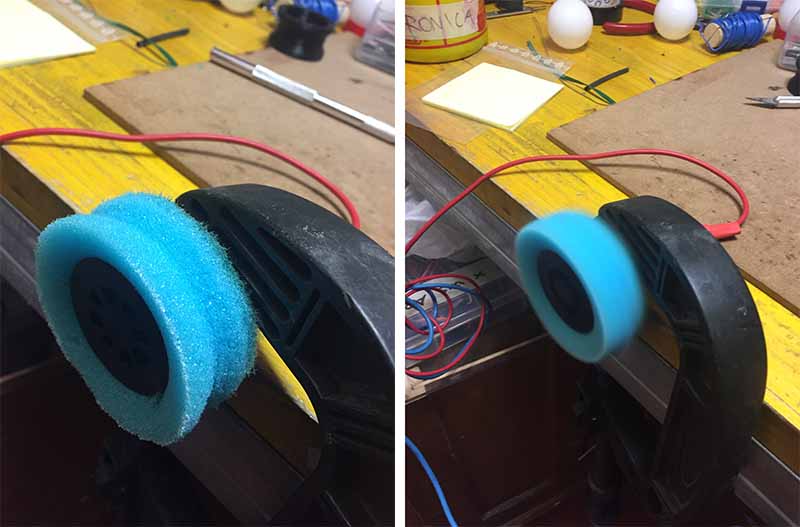
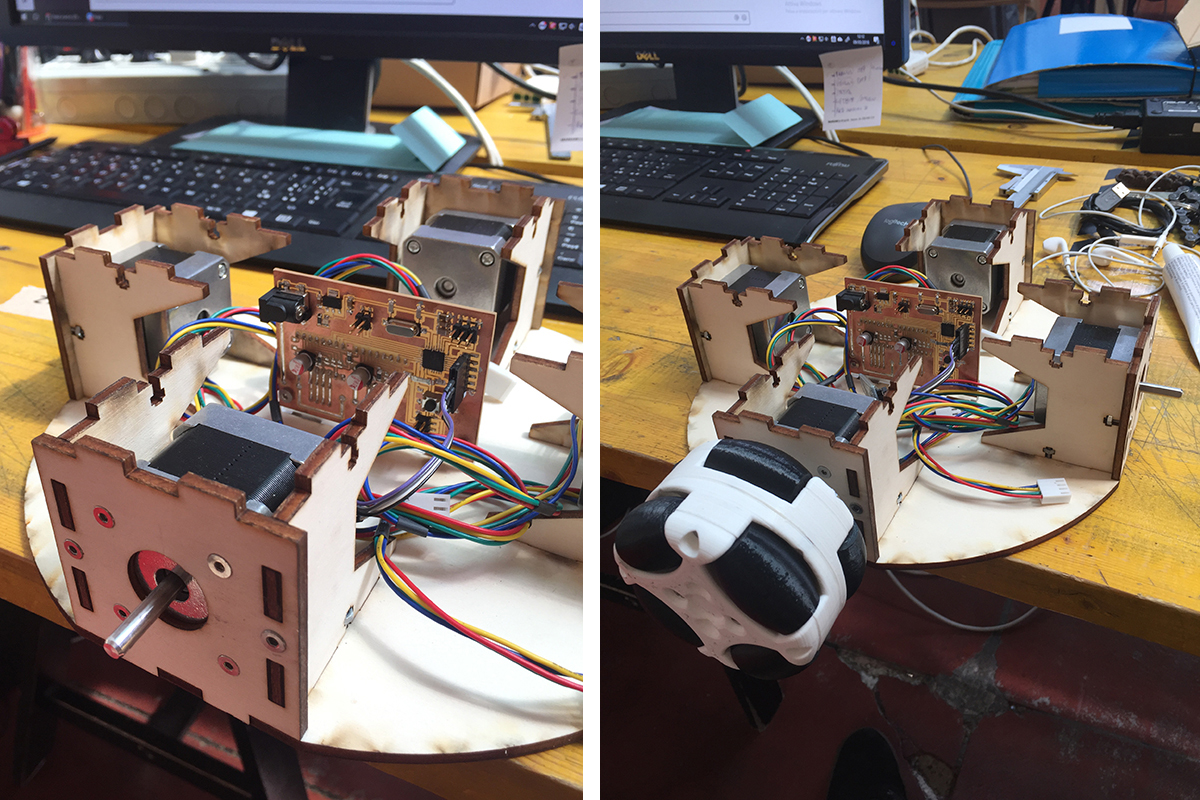
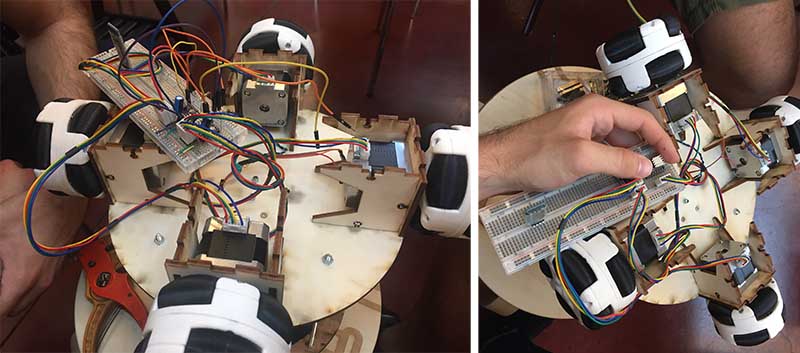
Omniwheels is being assembled with 3D printed wheels, support sides laser cutted and Stepper motors.
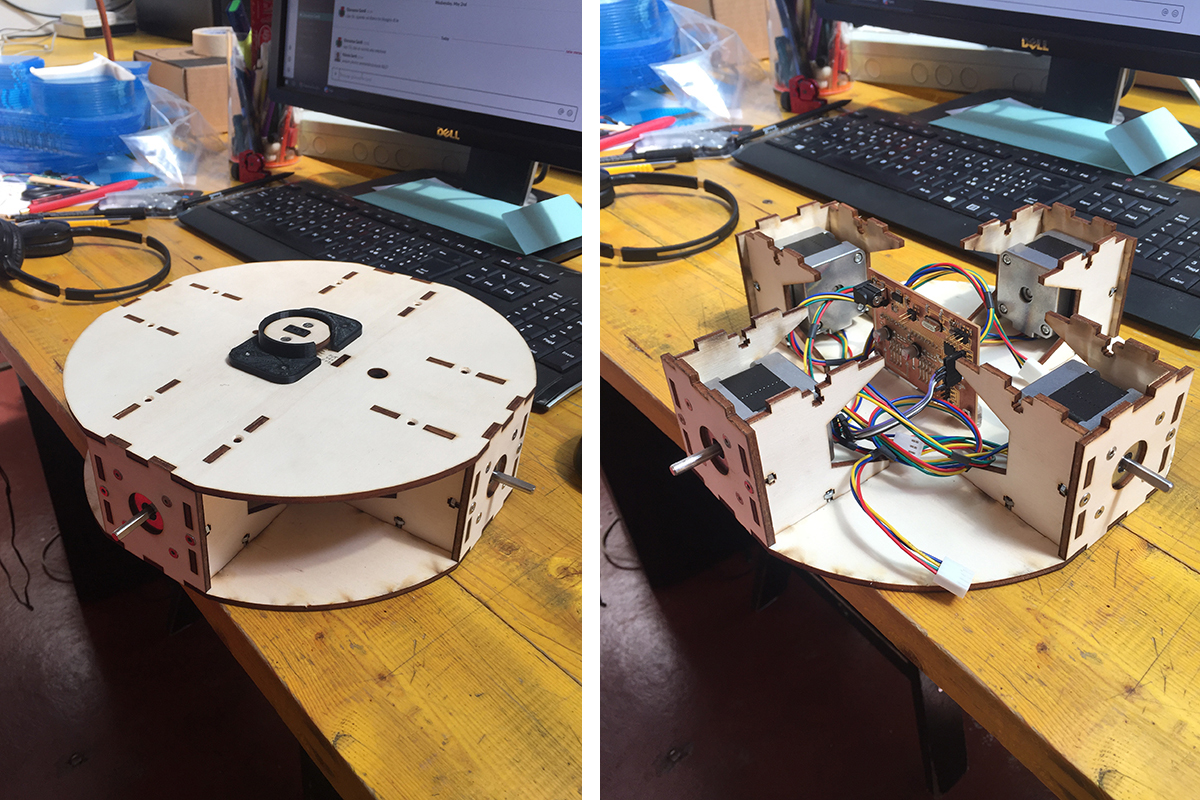

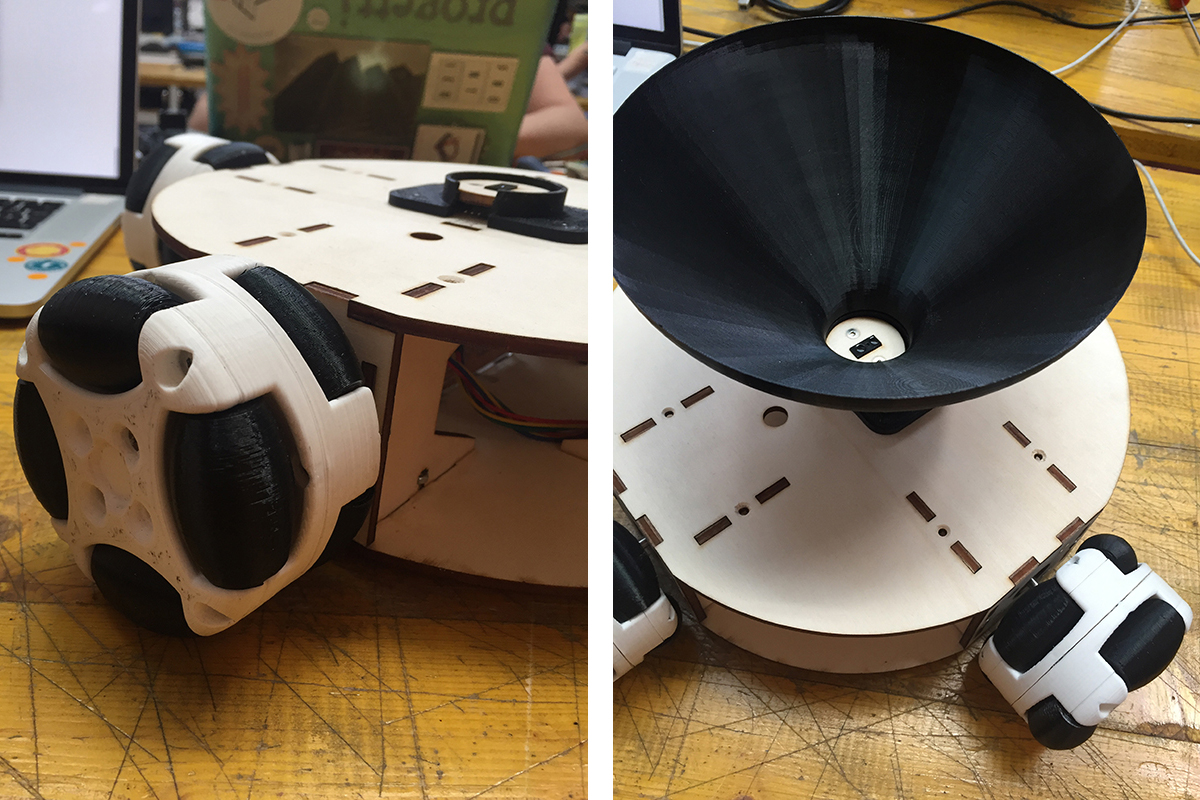
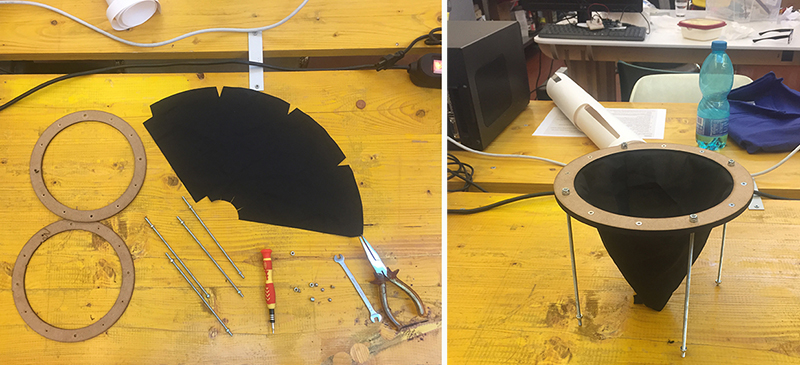
The second part of the design of a CNC machine consists of a mobile basket. The basket can move in all directions thanks to four omnidirectional wheels controlled by a card programmed with a GRBL firmware. Above the central body a cone-shaped basket has been mounted. Through the interface you can decide the position and the speed of the basket.
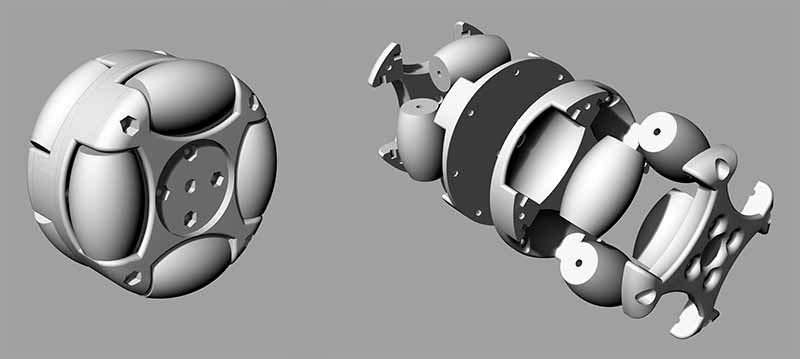
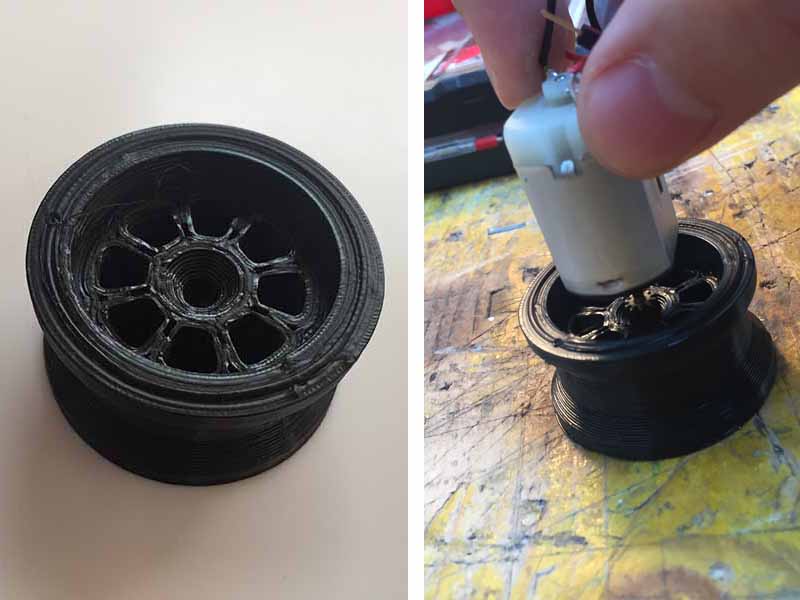
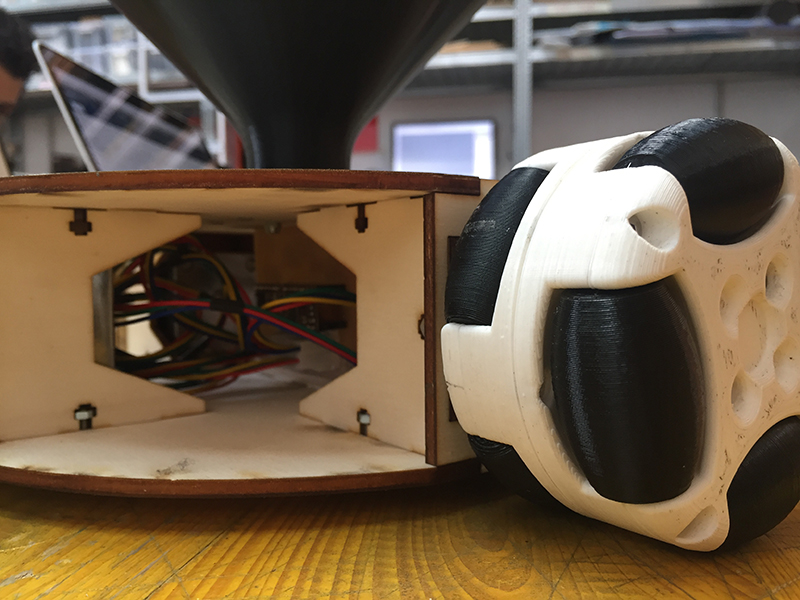
OMNIWHEELS: the wheels were made by downloading an example from thingiverse.com (https://www.thingiverse.com/thing:1464755) and modified slightly. The wheels were made with the 3D printer in all its parts. Each wheel is made up of eight smaller wheels that allow its transverse movement and 4 elements that close the smaller wheels in a sandwich. Each wheel is connected to a stepper motor. The opposite wheels move in the same direction, so they do not allow the robot to turn around its central axis.
BODY: it was made of laser-cutted plywood.
BOARD: with regard to the movement of the card has been programmed with a firmware grbl, similar to those of the modified numerically controlled milling machines, to control the interaction of the wheels to enable it to move in a known position. An infrared sensor has been connected to the card to detect the presence of the ball. The communication takes place via bluetooth and an interface through which you can adjust the speed of movement, decide on the size of the playing field and the position of the robot within the field. Inside the interface there is a button to confirm the position of the robot and to start the movement. Finally, the stat button changes color if the infrared sensor is activated.
BASKET: the basket has a height and a diameter of 16cm, is composed of a double circle in plywood which is supported by 4 threaded bars. The ball is directed towards the infrared sensor thanks to a fabric cone fixed at the top between the two plywood circles, and at the bottom by a ring obtained with 3D printing.
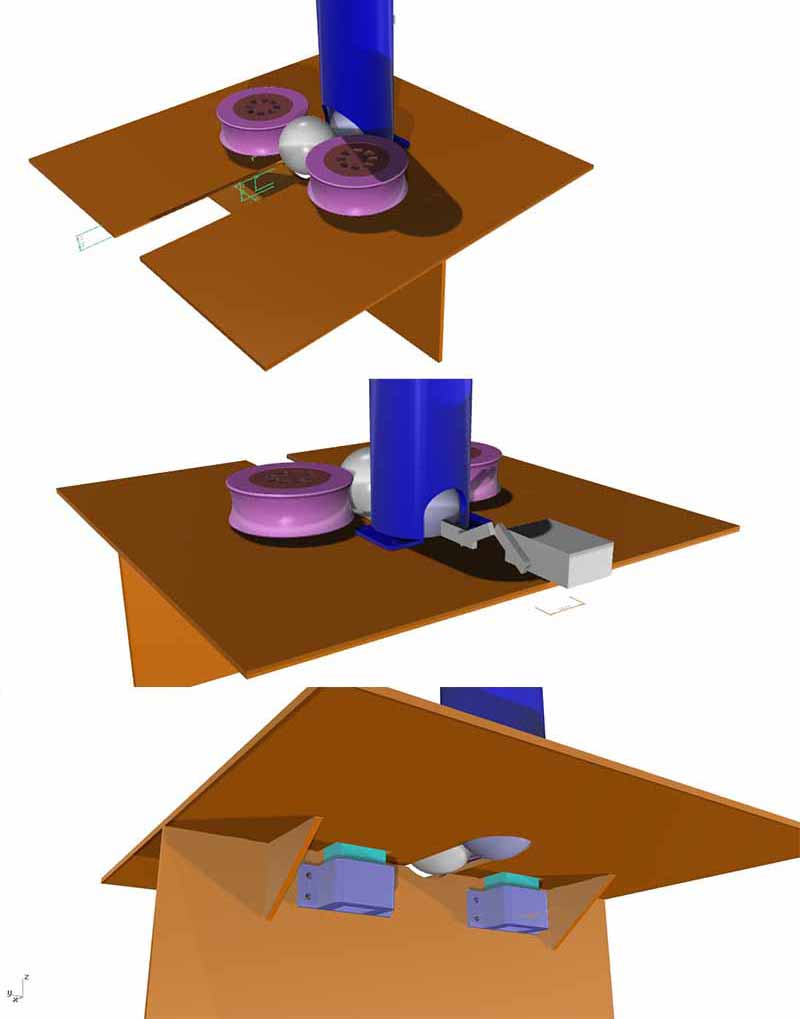
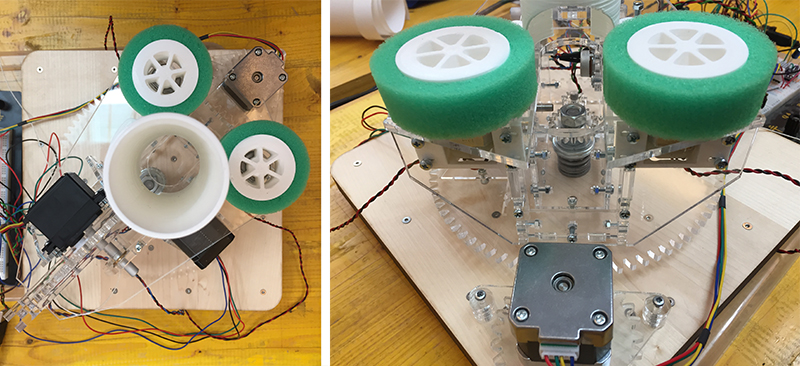
Three are the parts of the ping pong ball shooter
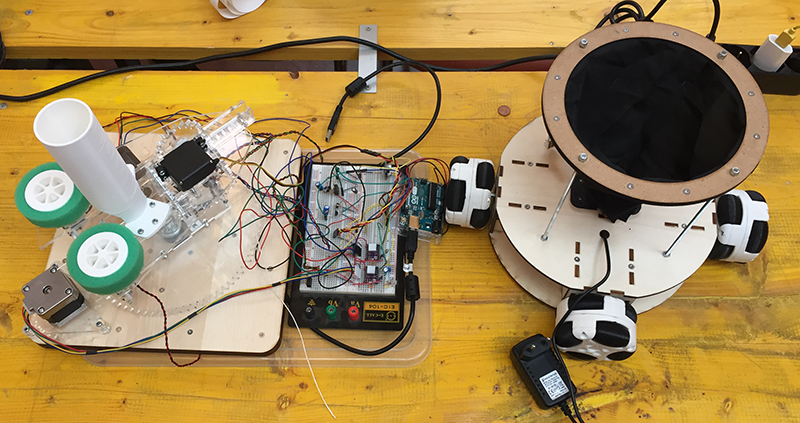
our board has stopped working, the day before the review! we are trying to replace it with an arduino!
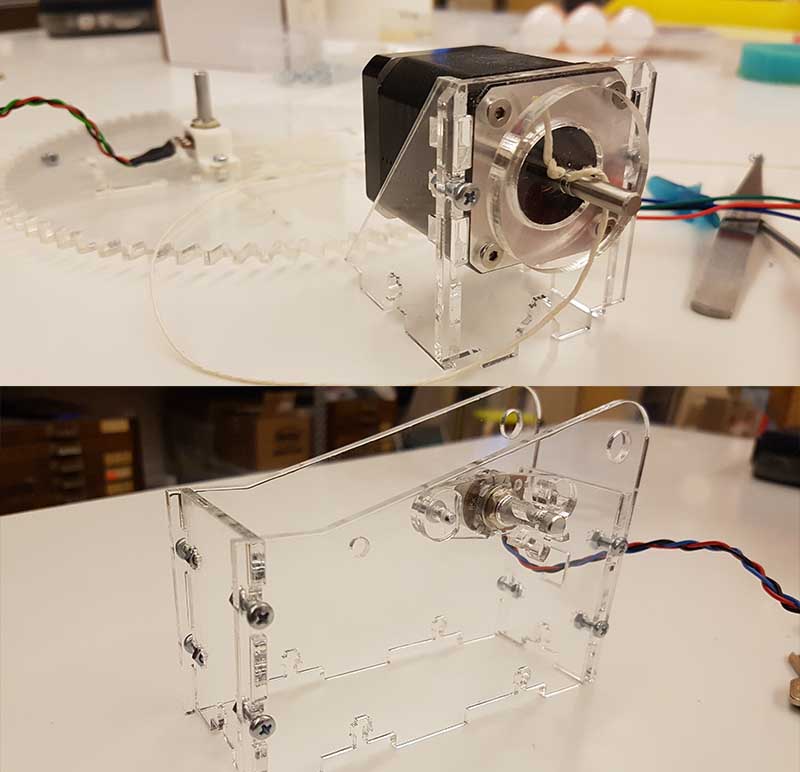
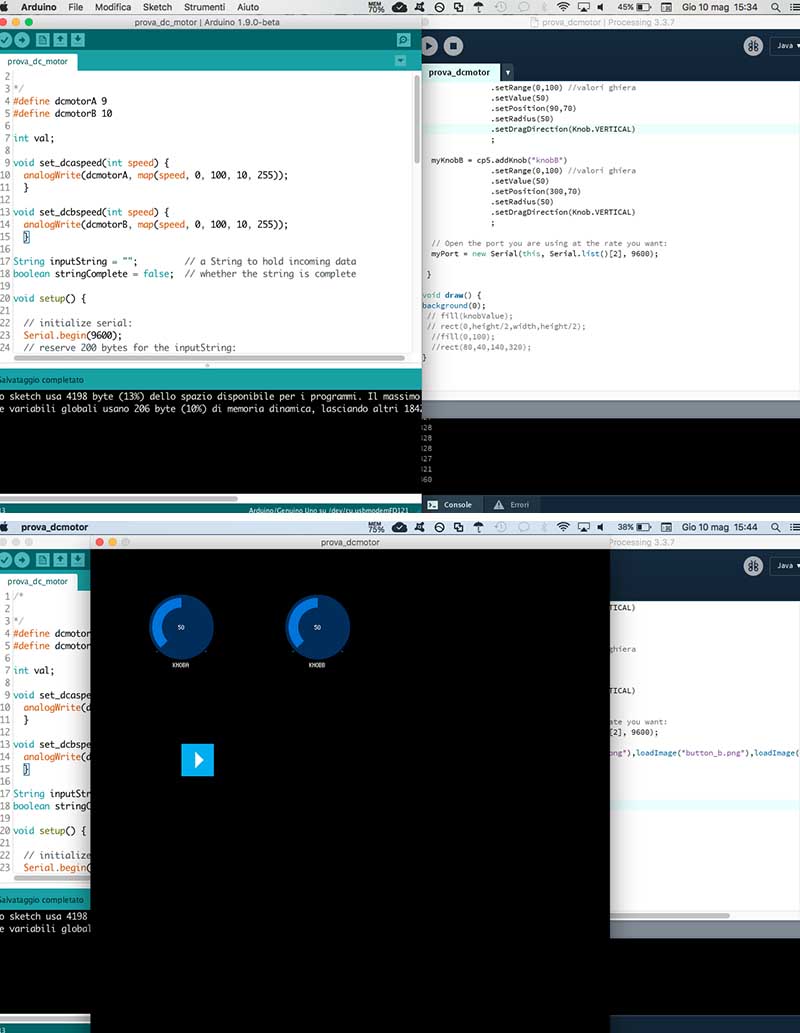
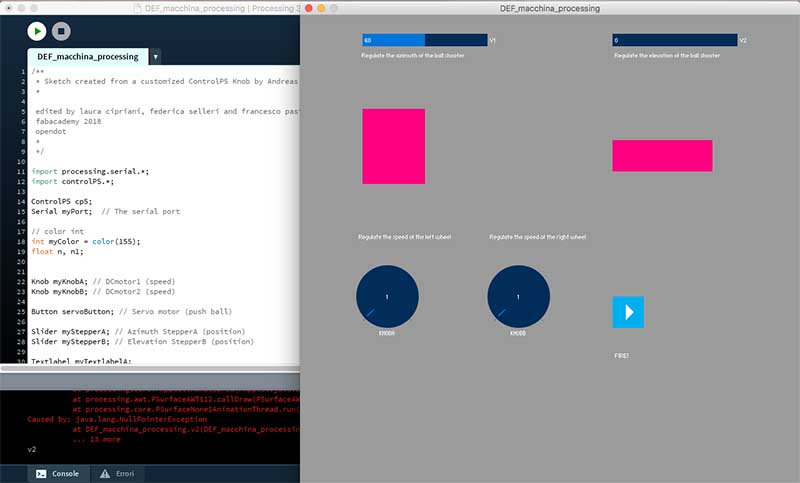
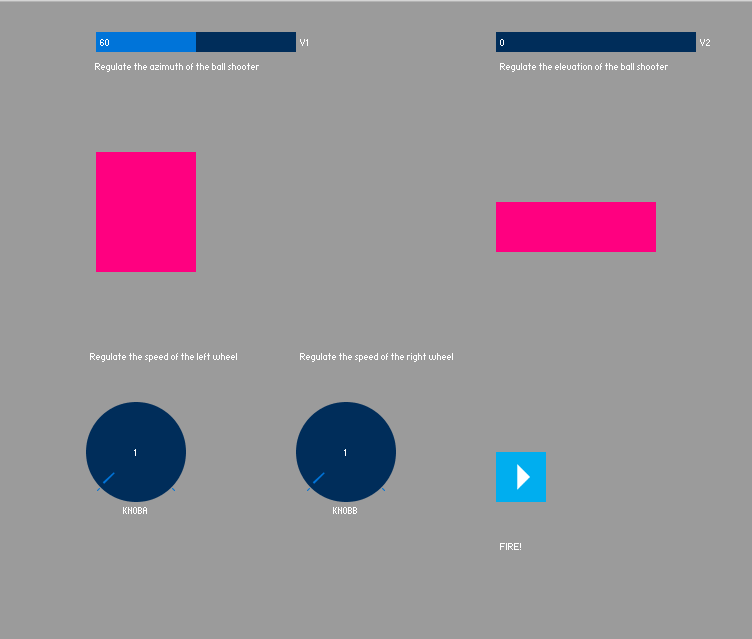
The shooter interface is divided into 3 parts: the first part is used to manage the two movements of the launch pad: the rotation and the azimuth. The cursors are used to better manage the movement and the rectangular shapes help to perceive the movement that the machine is doing. The angles of movement correspond to those of the machine or from 0 to 120 for rotation, from 0 to 60 for the lift. In the second part you can manage the speed of the discs separately, we have chosen sliders that resemble a tachometer: to control the throw and the speen shoot of the ping pong ball.
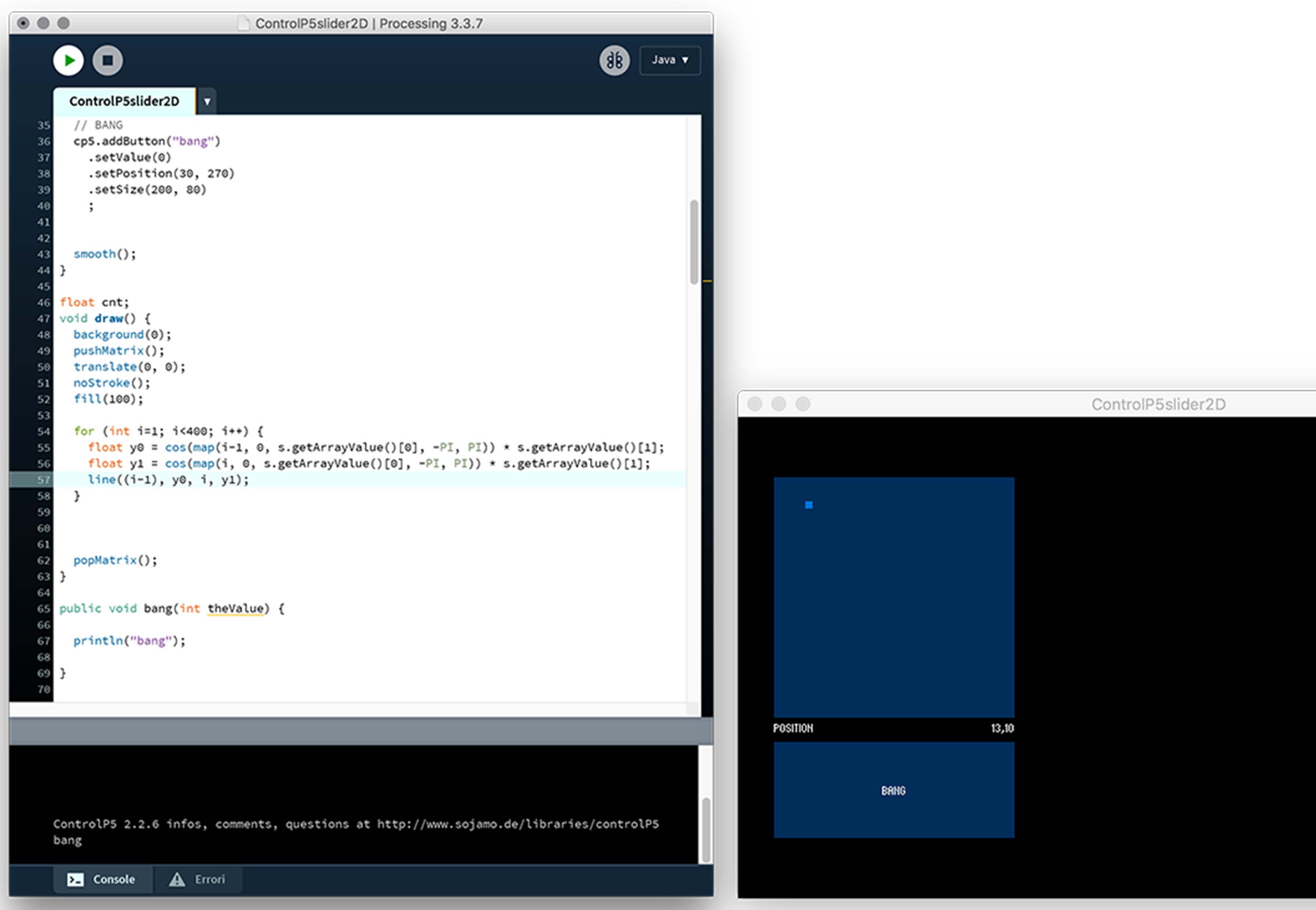
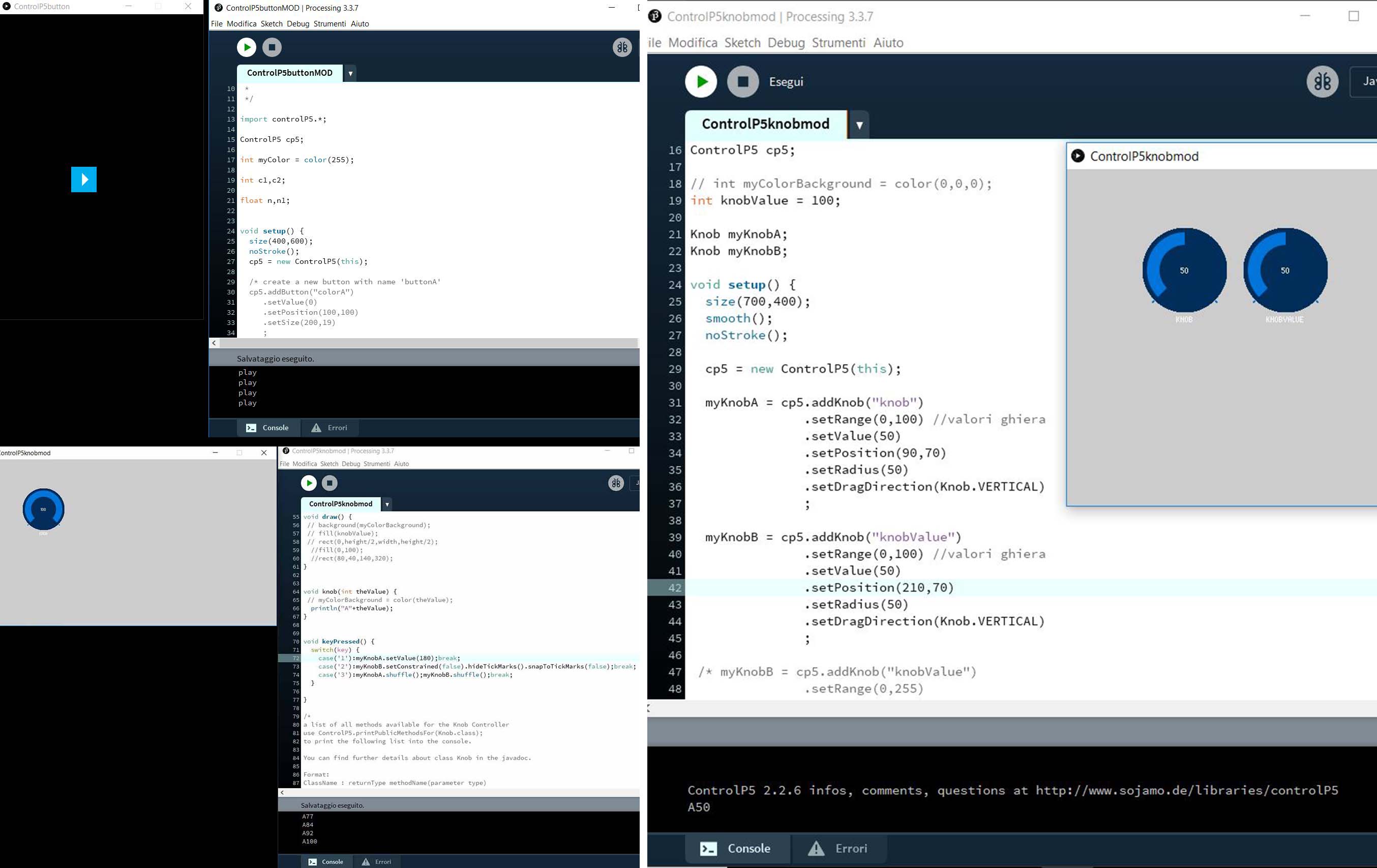
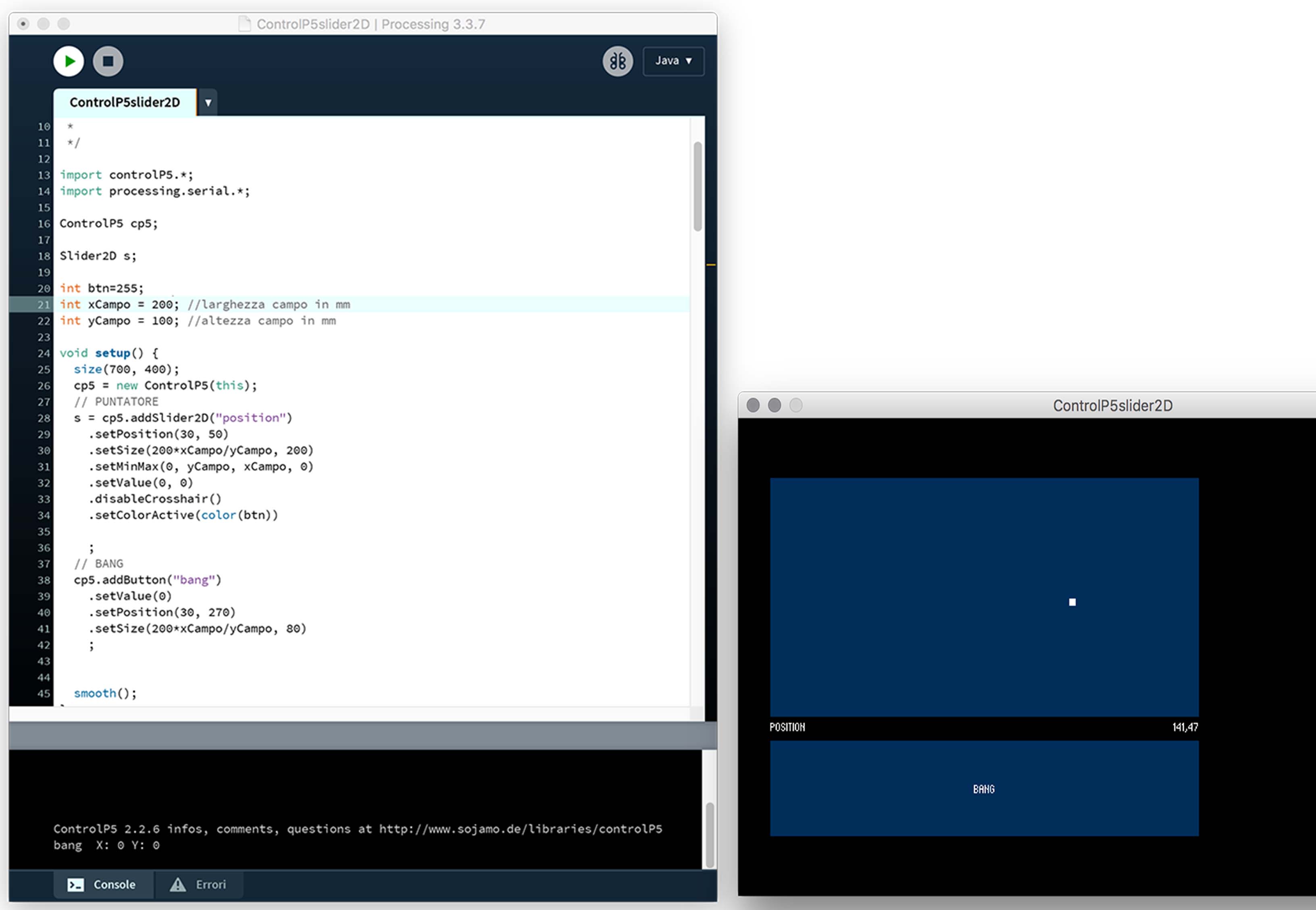
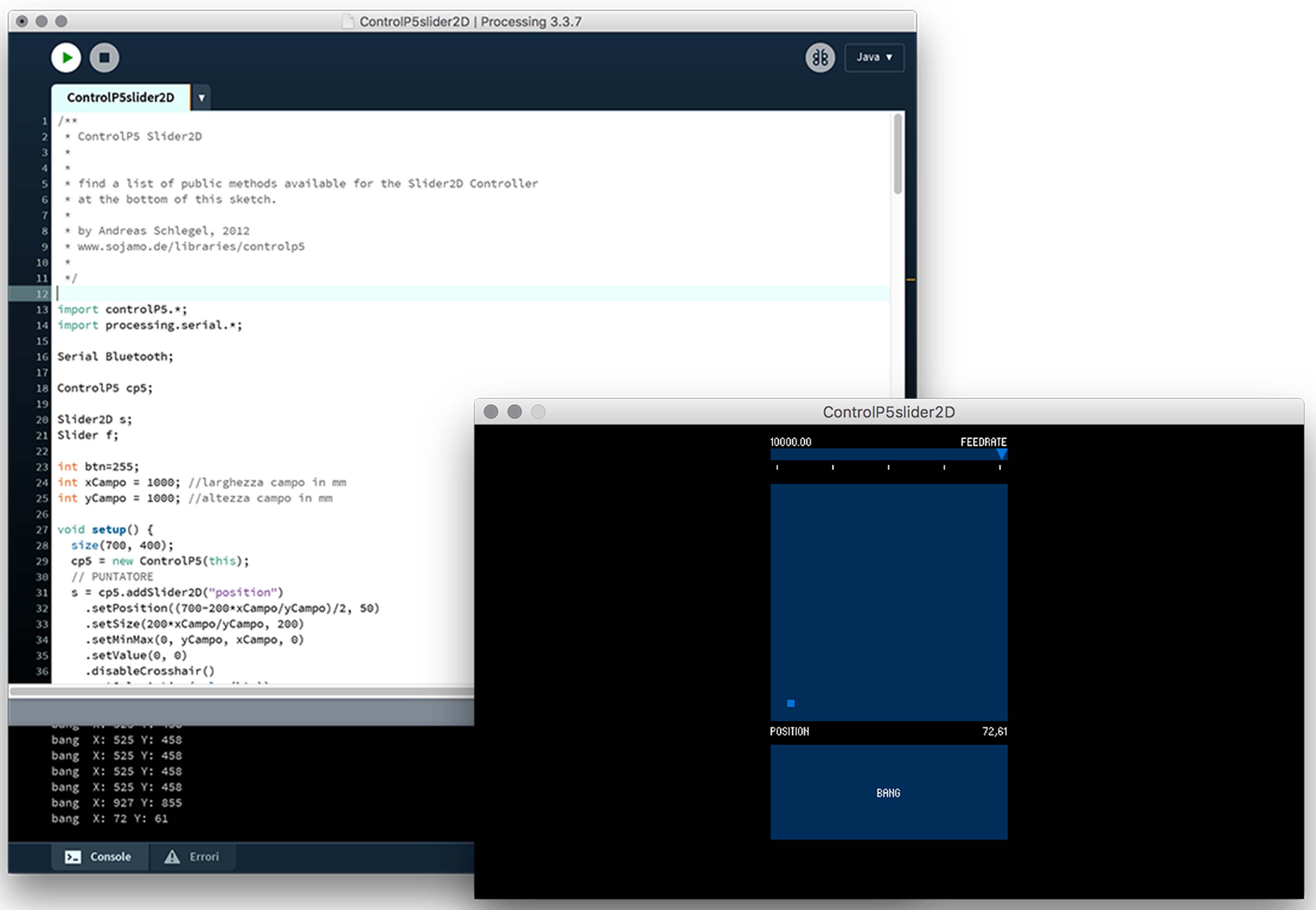
After connecting the robot to the power supply and connected via bluetooth to the PC, you can open the interface on Processing and start playing. Before starting the interface program, enter the dimensions (in millimeters) of the playing field. As soon as the PC and the robot are put into communication and the field size has been declared, the robot is in position 0,0 of the field, ie in the lower left corner. Through the interface window, in addition to the position, the movement speed can be established via a scroll bar at the top. The field is represented by a rectangle that will have the (proportionate) dimensions of the real field of play. Inside the field the robot is represented by a small square that can be moved with the mouse pointer.
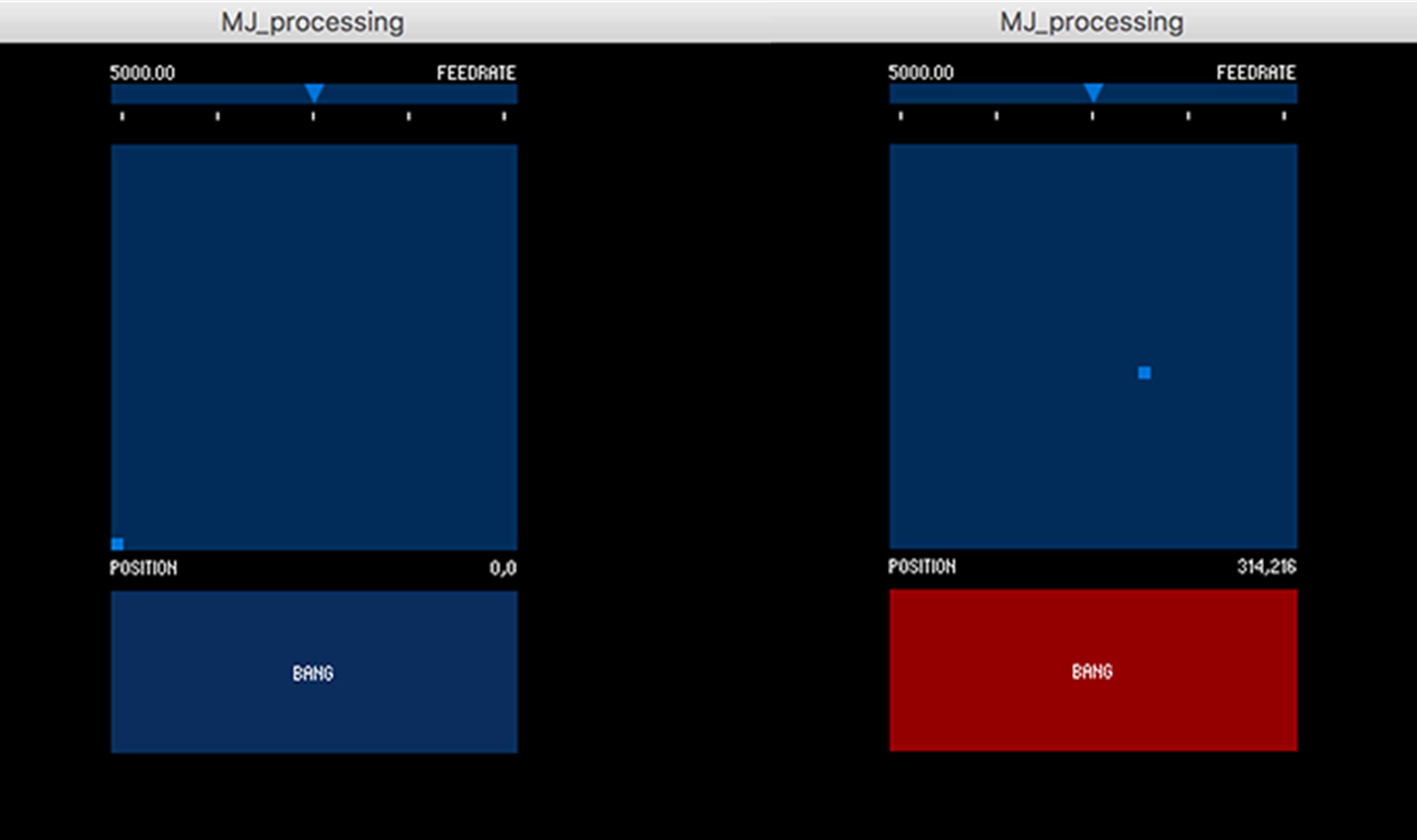
At the bottom of the interface window is the robot's start button and moves it to the position in the field we have just chosen. Finally, the start button changes color if the ball activates the infrared sensor positioned on the bottom of the basket.