Week15
Mechanical Design
First 1:
You can see the complete documentation of machine weeks on the opendot website at this LINK.
Brainstorming and team building
Last week, we met at Opendot and talked together about a machine which does something, and in its parts can be useful to our individual final projects. We thought of a ping pong ball shooter to a moving target, and after a brainstorming, we chose to built two machines:
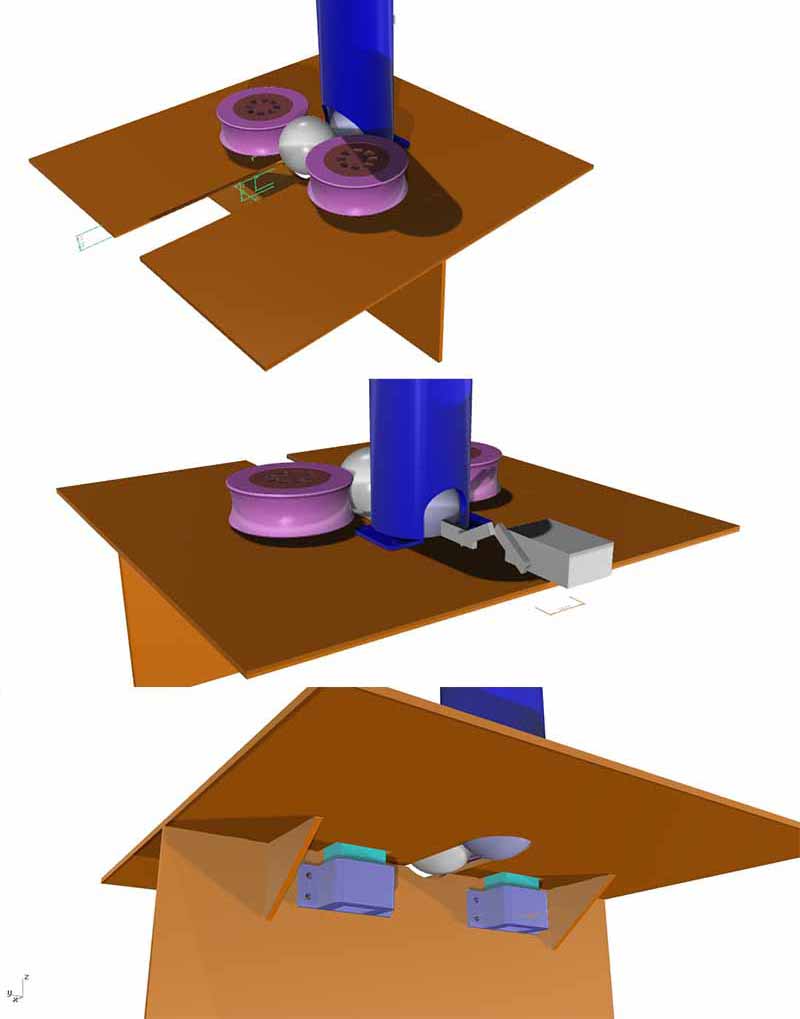
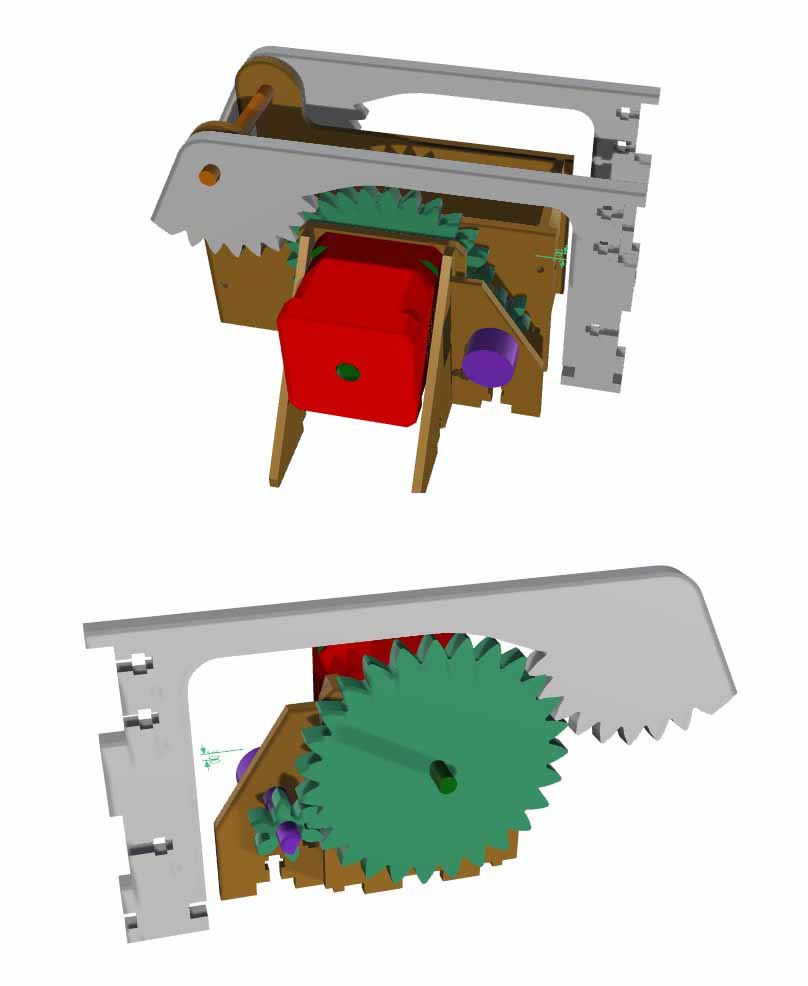
- a ping pong ball launcher that will point a guided direction, raising its board and launching the ball through rotating wheels, and a guideline, and will shoot the ping pong balls, built by me and Massimiliano D'Angelo for the mechanical design; Gianluca De Rossi and Federica Selleri for the machine design;
- a remote-controlled target robot which will move at random, stopping and going alternatively, built by Alberto Ongari and Catherine Blanchard for the mechanical design; Francesco Pasino for the machine design.
The initial idea was to design two very versatile machines that could be used for "educational" purposes to approach "STEM" subjects.
Inspiration
Some of us love soccer, and were fascinated by a professional ball shot machine like the Globus EuroGoal one. Some others love robots, so they thought that the target could be a basket fixed on a remote-controlled mobile robot.Before starting the mechanics design we started to define the parts that had to compose the two machines.
Parts of the platform shoots balls:
Parts of the robot catches/dodges balls:
3d models | platform
I work on this part in team with Federica and Massimiliano. Once the first concept was developed, we divided the parts to be modeled and prototyped. I took care of the first version of the launch pad. For 3D model I design with Rhinoceros.
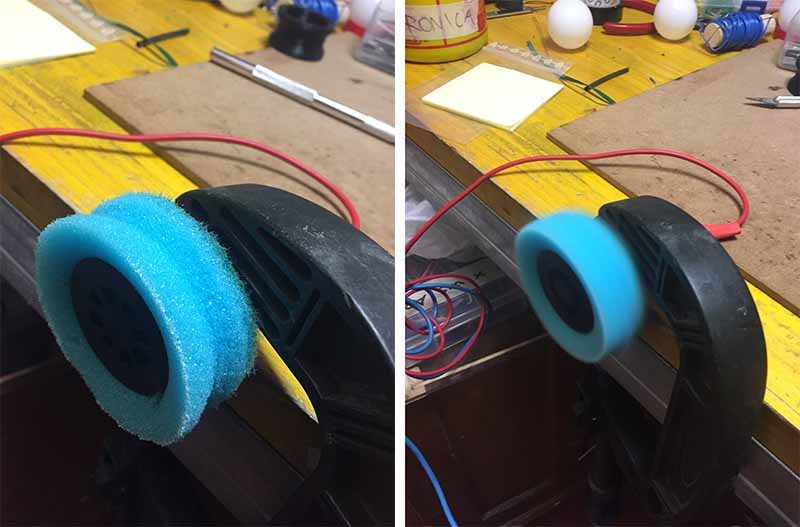
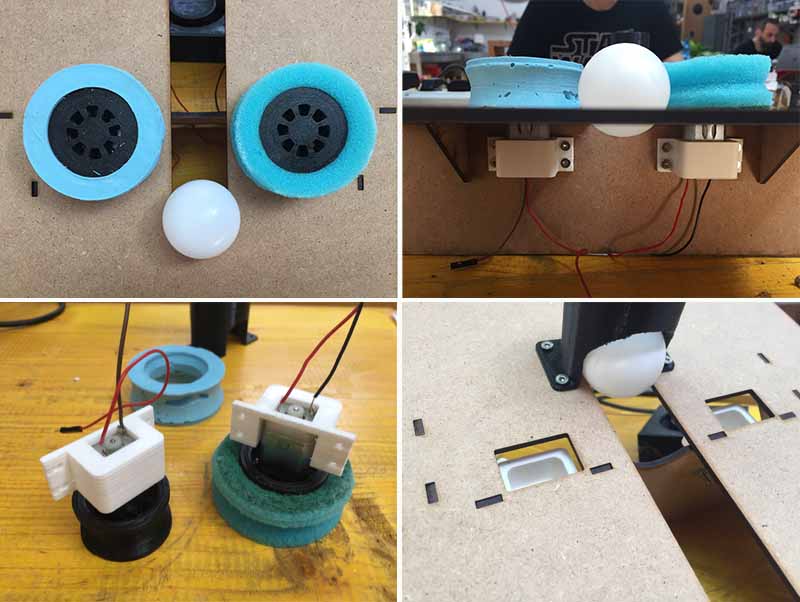
making of | platform
For prototyping part I used different technologies: lasercutting, 3d printing, molding and casting with rigid mold.