My Final Project Proposal
My final project proposal is a robot vacuum cleaner based on the iRobot Roomba.

I chose this project because I will apply the knowledge I have
learned in the assigments below to build the robot vacuum cleaner
- Project manager, to plan and document the progress of the project
- Computer-aided design, to investigate on the right software for the product design
- Computer-controller cutting, for investigate and learn about how to cut flat pieces for my project
- Electronics production, will help me to make the PCB using the milling
- 3D scanning and printing, for the printing the internal supports and prototypes of parts and pieces of the vacuum cleaner
- Electronics design, will help me to investigate about electronic circuit design software and prepare my own plates
- Embedded programing, will help me to investigate programming languages for microcontrollers in my project
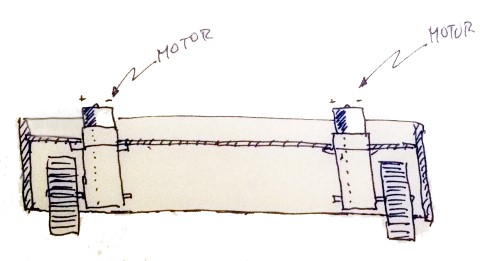
- Output devices, for work on the engines of the vacuum cleaner
- 3D molding and casting, for the manufacturing pieces, for example the wheels.
- Input devices, for work on the sensors of the vacuum cleaner
- Networking and communications, in order to specify the wireless communication between the cell phone (through which the command will be issued) and the vacuum cleaner.
- Interface and application programming, regarding the tools to program the communication interfaces
- Applications and implications, to formulate my final project using everything learned and researched
- Invention, intellectual property, and business models, to prepare documentation of licenses.
Once it is finished it can be used to vacuum dust from the interior of a room, or a basement.
Even though we can find this kind of vacuum cleaner in the national market, I believe that designing and building a
vacuum cleaner under the scheme proposed by Fab Academy will allow me to give an option for this product at a lower price.
In fact, in Lima, Roomba vacuum cleaner can cost more than 50% of the price that it is in the United States.
In fact, in Lima, Roomba vacuum cleaner can cost more than 50% of the price that it is in the United States.
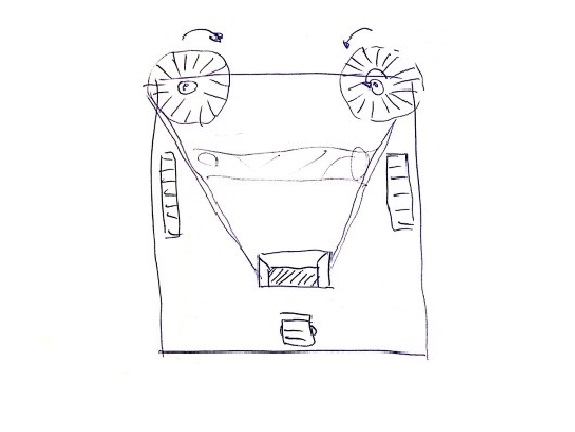
The robot will have the following functionalities:
- Operable from a mobile application or automatically,
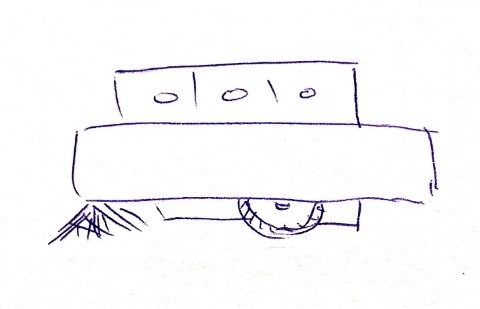
- Wheels for displacement that allow 360 ° rotation,
- Rechargeable battery,
- Sensors to avoid obstacles or falls,
- Side brushes for sweeping dust,
- Aspiration system,
- Trash container with filter,
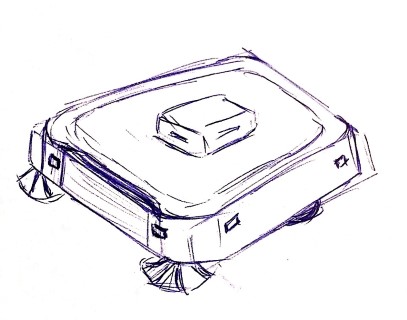
- Design with smooth and rounded surfaces, and
- Positional lights to avoid accidental tropping