
Final Project
- Via Wifi communicating robot arm carrying and handing out tools
- Design Constraints
- Beer Crate format to be stackable and expandable
- Modular, so new mechanisms etc can be designed onto it.
- Challenges
- Programming
- Custom PCB
- Real Life usefullness
- Amount of work
- Design of foldable arm
Idea
- Depictured in a previous assignment HERE
Research (these are Links)
- concept of Turtle
- Neil talking about Turtles
- Movable Arm Concept
- Means for controlling
- Another Arm on Platform
- Swarming
- Making it “ridable”
- 3D printed head for authenticity
- Arm on a platform concept
- Gripper with Force Feedback
- Robots using ESP8266
- Arm Controlling Interface
- CNC milled platform with custom tires
{kind=link}
[Planning]()
- Todo ** Find requirements ** First Prototyping ** Redesigning ** Components Fabrication ** Electronics ** Programming
[PCB]()
** Wifi-H-Bridge-Board ** Potentiometer-Board
Required parts
- 1. Arm (Machine Week) ** 1. Gripper ** 1. Potentiometer holder ** 1. Controlling circuit holder ** 1. Tool Rotation, Arm extrusion circuit
- 1. Controller
- 1. Controller-Finder-Circuit
- 1. Mainframe Control circuit
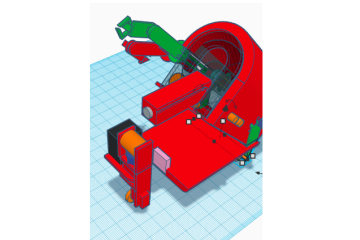
[3D Model]()
- Todo ** To do in solidworks and OpenSCAD3D
[Mechanic]()
- Todo ** Prototype in mdf (because it is more robust) ** 75mm PVC Tube as main support
[CNC]()
- Todo ** Finally cut in Plywood and Polyamidand ** Base prototype: ** ![Base Prototpye]()
[Programming]()
- [Web Interface for controlling]()