Group assignment: test the design rules for your 3D printer(s)
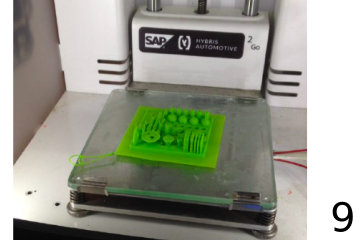
We are all limited by our own imagination, so I borrowed the imagination of a user of thingiverse to test out the possibilities of the two best 3d printer I have at Erfindergarden. Which is Craftbot (Image 3) and Ultimager 2 Go (Image 9).
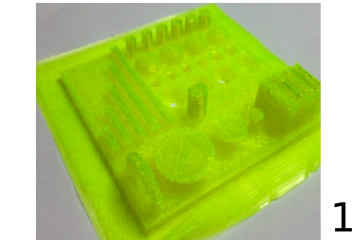
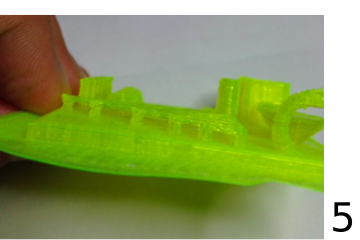
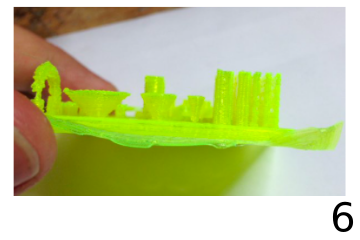
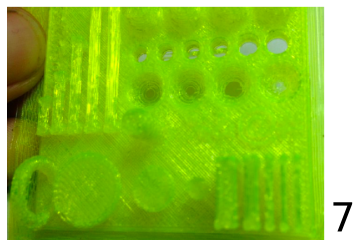
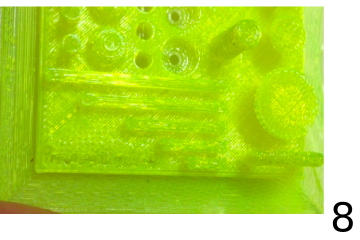
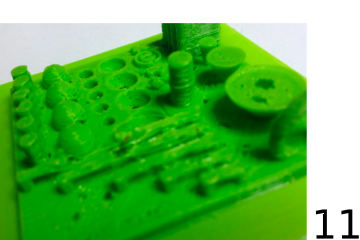
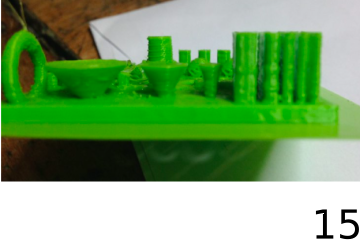
In the caroussel gallery you can see how the torturing parts came out. In the consistency of mechanics the Ultimaker 2 Go clearly ahead. The amount of detail is already incredible at 0.4mm nozzle.
On the other hand, Craftbot’s Cura profile is better configurated for bridging so for the individual assignment I will use Craftbot.
Briefly to the 3D printing process:
* Once your 3D design is finished, you can download or export in a STL-Format (Stereo Lithography or Standard Tessellation Language), which is a representation of the object in trianglular surfaces.
* This stl-file is loaded into a slicer, a special CAM-tool to convert these 3D information into 2D path information. The resulting data is a G-Code, which is a collection of movement commands for CNC-machines in general.
** This Gcode-file is copied to a removable storage unit, inserted into the 3D printer and in it’s menu, you press print.
** It is important, not to start “Preheating” the hotend and the hotbed at the same time, otherwise the hotend will clog due to changes in the chemical compound in the filament due to overheating.
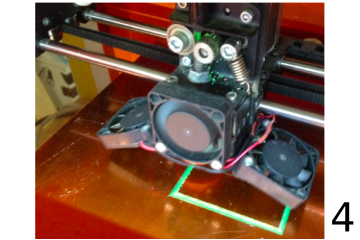
** When the printer is ready, it starts to print it’s first layer. It is sometimes difficult to get your print to stick to the bed, especially when there is a sharp edge. In this case, you need to add brim, a round offset to enhance the surface area of the print. (Image 4)
Individual assignment:
Design and 3D print an object (small, few cm) that could not be made subtractively
At first, it was difficult to image a object which could not be made subtractively, because I already know that there is a such thing as a 5-axis CNC machine. Furthermore, when I design I always think of possibilities to not necessarily requiring support. In this way it often remains subtractively manufacurable. And finally I had to vanish soldering, glueing from the “options” of imaginary designing, which would have enabled quite an amount of objects.
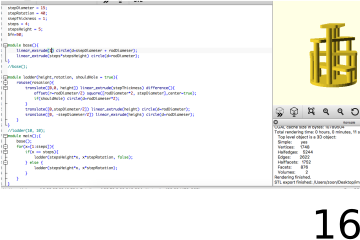
As a result, I came up with a spiral steps, which is parametically designed in OpenSCAD.
There are three characteristics:
* I deliberately printed it without support to one, maintain it’s beauty and second because I already knew that the print could handle some briding.
* Since such thing as a 5-axis CNC machine exist, a completely round shape would be impossible to make, if there is something in the way (top, wideways). Therefore, there are holes and poles everywhere.
* Using the capabilities of parametric design, I could optimize the shapes so that the finest of pillar would be possible, according to the torture test.
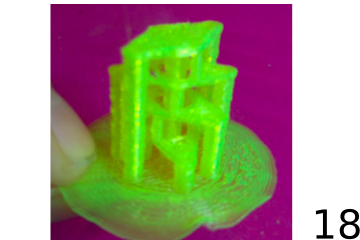
What came out in the end is pretty satisfying:
3D scan an object
For a long time I was fascinated by kinect which can provide color-correct 3d scans. Unfortunately I did not have one, but in the lab we have a iSense (Image 21)
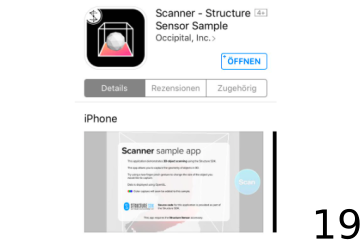
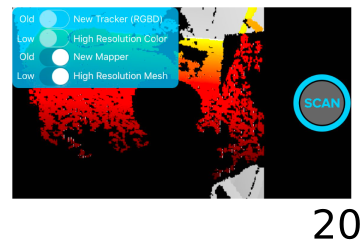
After downloading it was pretty easy to scan an object. It has a cubic cell which uses argumented reality to make clear what distance you have to keep from an object to be able to scan, which is shown in the app (Image 20).
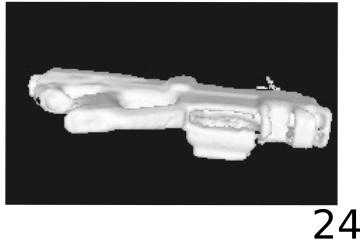
Few scans later, it occured in my mind that the process of scanning is quite similar to airbrushing or spraying, because one have to be able to access all surfaces. Thus I put a rope from the ceiling and hang a nerf-gun (toy gun) from it and walked around it. Surprisingly the scan turned out to be perfect (Image 24)
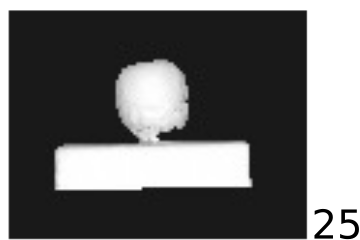
WIth the toy-gun scanning I realized that there is a maximum size. Then I wanted to find out what the minimal size of scannable objects would be. Quite dissappointingly even at the size of an apple (Image 25) it lost track, due to inaccuracies and the black floor. So I put the apple onto a small box and then it was possible to scan. I tried to scan a bigger version of the “impossible print” but it lost the orientation quite soon.
There would be still room for correcting the 3d scanned models which come in an obj-file format by using meshlab, which will be hopefully done in the future.