Final project- TrailNav project
1. Project Description
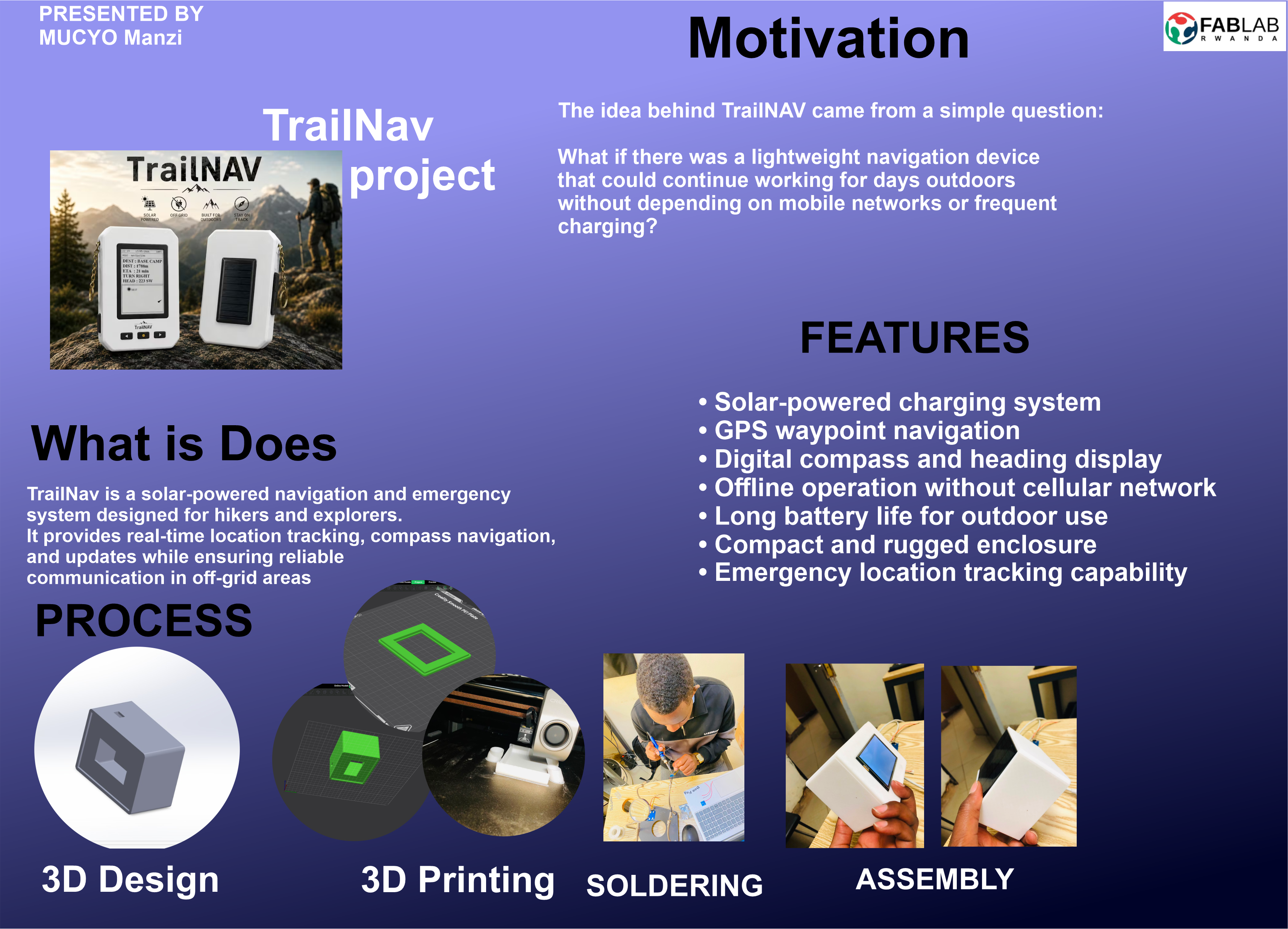
TrailNav
TrailNAV is a solar-powered offline navigation device designed to help outdoor users explore safely in remote and off-grid environments. The system assists hikers, campers, cyclists, and adventurers by tracking their location, storing and guiding waypoints, and providing real-time directional feedback without relying on internet connectivity or mobile network coverage. The device integrates GPS technology, onboard storage, and an energy-efficient solar power system to ensure continuous operation during outdoor activities. Users can save important locations, navigate predefined routes, and receive accurate guidance while traveling through unfamiliar terrain. Unlike conventional navigation applications that depend on network access, TrailNAV is specifically designed to operate entirely offline, making it reliable in areas where communication infrastructure is unavailable2. Motivation
The idea behind TrailNAV came from a simple question
"What if there was a lightweight navigation device that could continue working for days outdoors without depending on mobile networks or frequent charging?"
While smartphones provide excellent navigation features, they are not always ideal for remote outdoor environments:
- battery drains rapidly with GPS usage
- network dependency limits usability in remote areas
TrailNAV was designed to solve these problems through:
- ultra-low-power hardware
- solar-assisted charging
- minimal distraction interface
The goal was not to replace smartphones, but to create a focused navigation companion that remains dependable in outdoor environments
3. System Overview
The system is divided into two main modules:
Navigation Unit (Main Device)
A solar-powered offline navigation device controlled by an ESP32 microcontroller
- Integrates a GPS module to determine the user's real-time location.
- Stores waypoints and navigation data in onboard memory.
- a solar panel for continuous operation in remote environments.
- Processes navigation data and manages communication between system components
User Interface and Tracking Module
A user interaction module that allows users to manage routes and receive navigation feedback.
- Enables users to save, select, and navigate to waypoints.
- Displays location, distance, and direction information in real time.
- Provides alerts when users deviate from their intended path
- Operates entirely offline without requiring internet or mobile network access
This architecture allows TrailNAV to function as a reliable, energy-efficient, and self-sustaining navigation system that supports safe outdoor exploration in remote and off-grid environments
4. How It Works
TrailNAV operates by using GPS technology to continuously determine the user's current location and provide navigation assistance in areas without internet or mobile network coverage. The device is powered by a rechargeable battery supported by a solar panel, allowing it to function for extended periods in remote environments. When the system is turned on, the GPS module acquires satellite signals and calculates the user's real-time position. Users can then create, save, and select waypoints that represent important destinations or locations along their route. The ESP32 microcontroller processes the GPS data and compares the user's current position with the selected waypoint. Based on this information, the system calculates the direction, distance, and movement required to reach the destination. This information is then displayed or communicated to the user through the device's interface.
5. Components
| Item | Quantity | Price/unit | Total price | Link |
|---|---|---|---|---|
| Seed Studio XIAO ESP32C6 | 1 | 20,000 rwf | 23,600 rwf | https://www.nyerekatech.com/shop/seeed-studio-xiao-esp32c3/ |
| u-blox Neo-m8n GPS | 1 | 19,682 rwf | 19,682 rwf | https://www.faranux.com/product/gps-reciever-neo-6m/ |
| QMC5883 | 1 | 4,500 rwf | 5,310 rwf | https://www.faranux.com/product/gy-271-qmc5883l-module/ |
| Waveshare 264x176, 2.7inch E-Ink display | 1 | 27,080 rwf | 27,080 rwf | https://www.faranux.com/product/3-5-inch-tft-lcd-display-touch-screen-uno-r3-board-plug-and-play/ |
| Battery, 3.7 V1 MPPT | 1 | 9,000 rwf | 10,620 rwf | https://www.faranux.com/product/3-7v-801350-500mah-lithium-polymer-ion-battery/ |
| Mini Solar Panel - 12V @100mA | 1 | 8,900 rwf | 10,502 rwf | https://www.faranux.com/product/12v-mini-solar-panel-1-5w-mod35/ |
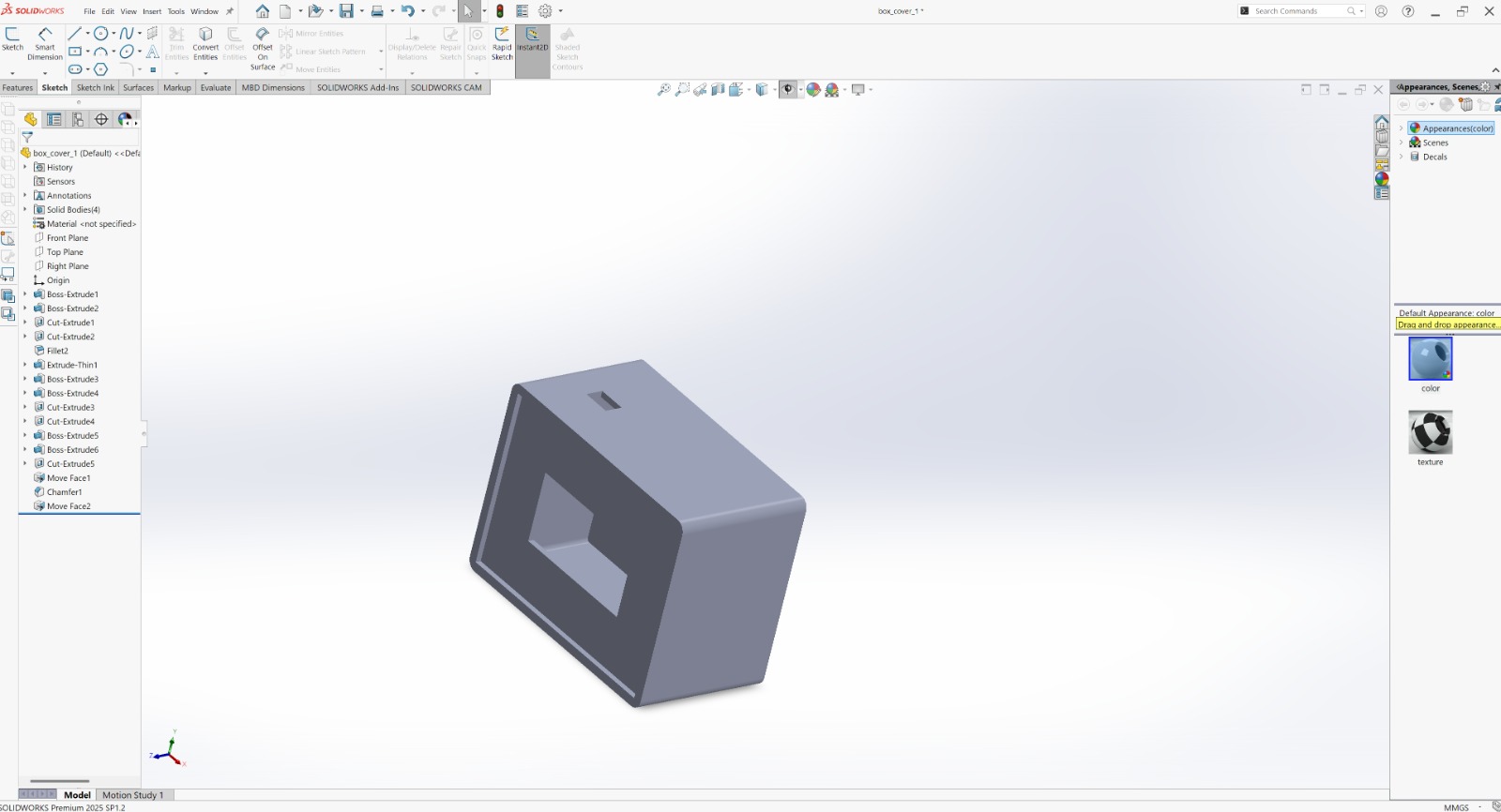
6.Final project design
I started designing the external cover of the TrailNAV device to protect and organize all the components, including the ESP32 microcontroller, GPS module, battery, MPPT module, and wiring
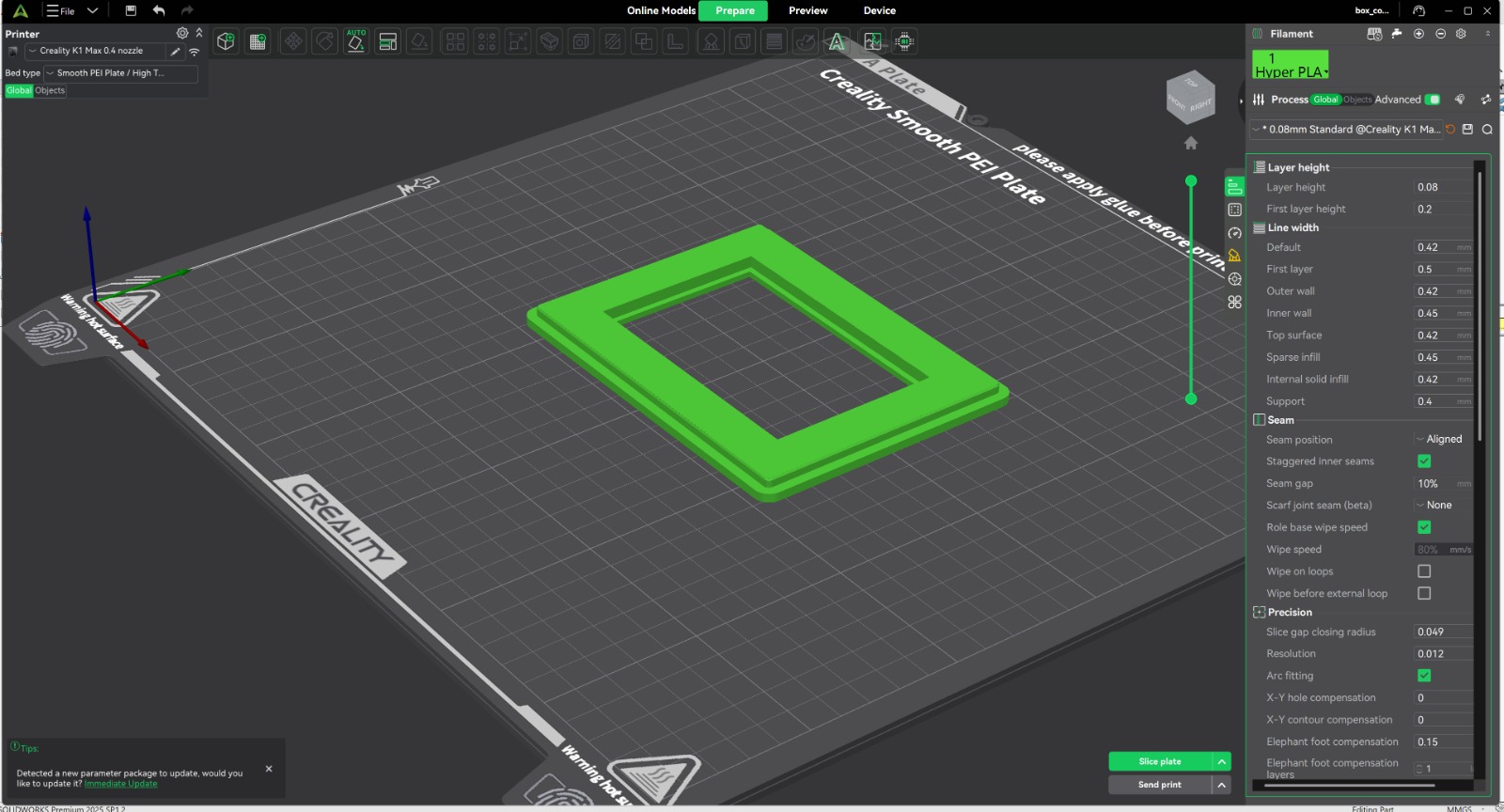
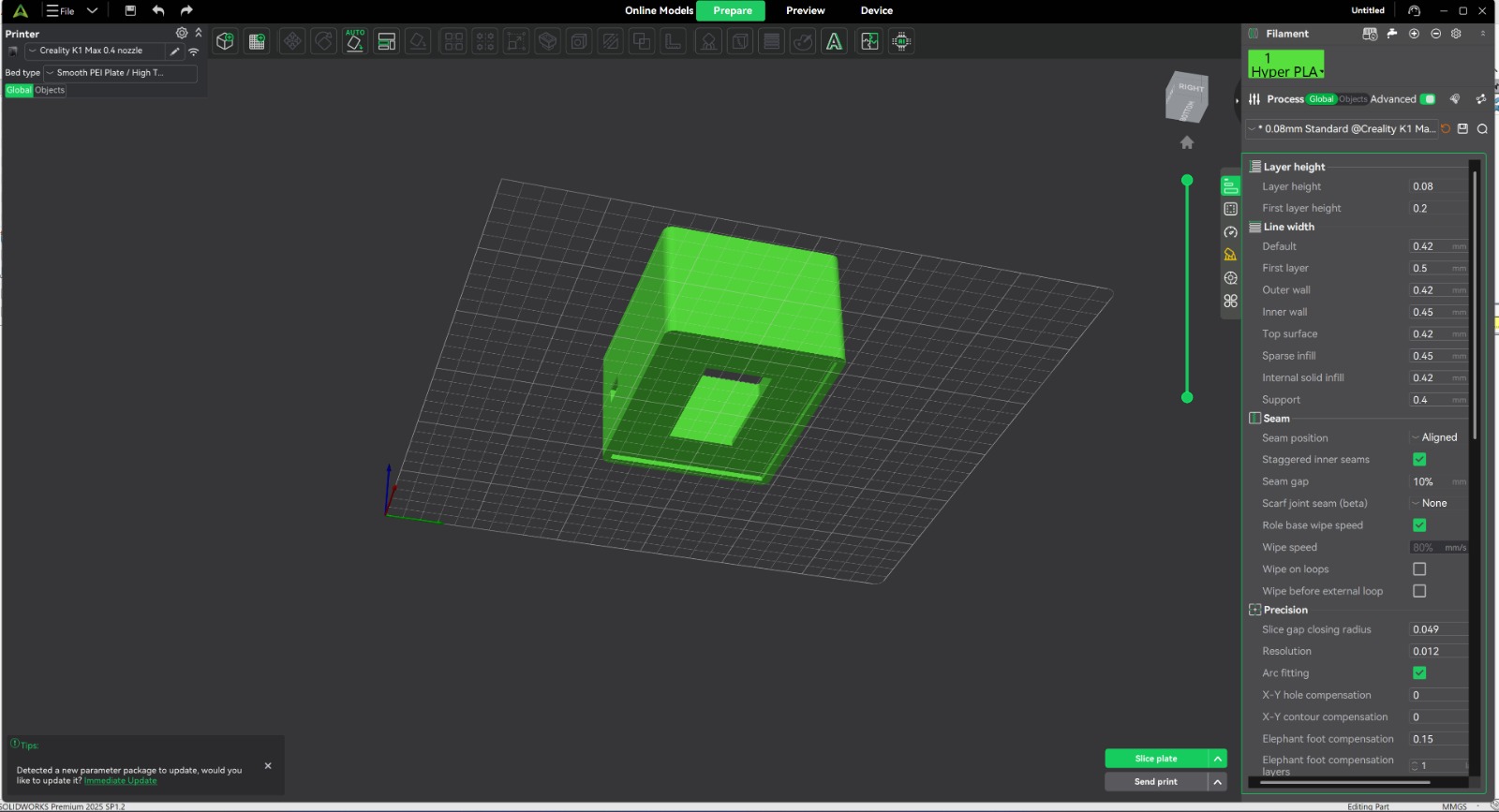
After designing the TrailNAV enclosure, I started the slicing process to prepare the model for 3D printing
After the slicing process, I started 3D printing the TrailNAV cover. This step creates the physical enclosure that will house and protect all the project components, preparing the device for assembly and testing
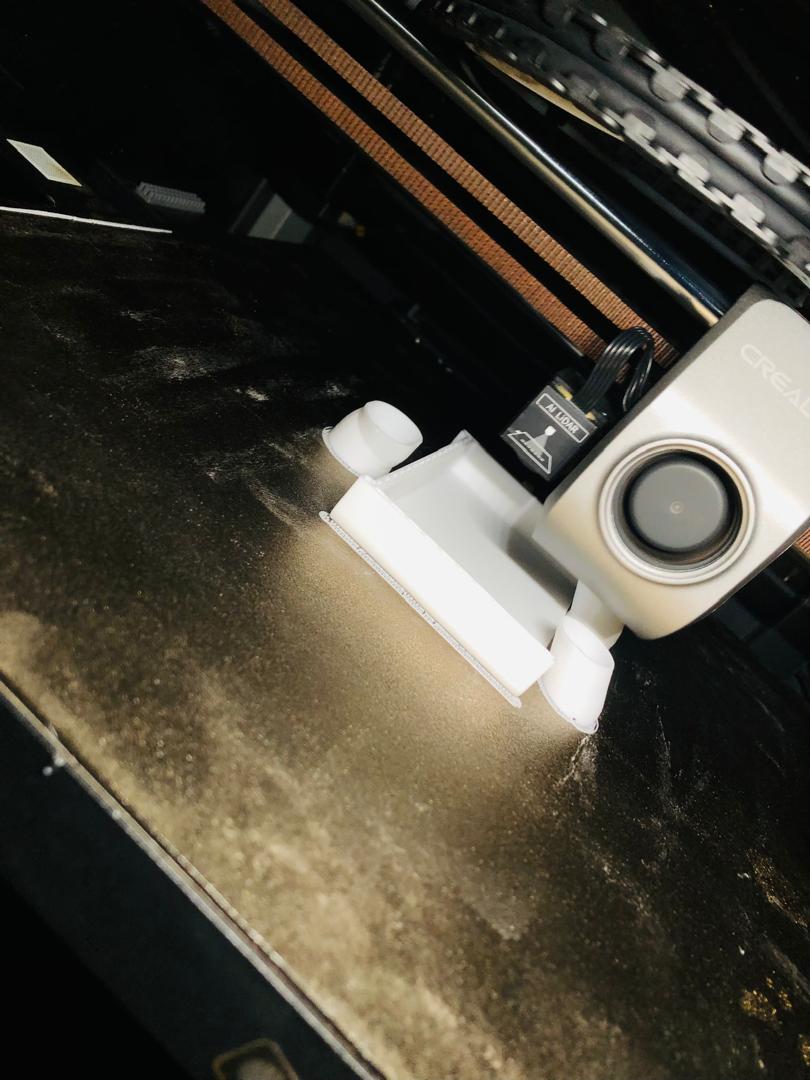
After printing the cover, I tested the fitting of the solar panel and screen to ensure they were correctly positioned and properly fit inside the enclosure. This step helped verify that the printed design was accurate before the final assembly of the TrailNAV device
7. Testing — what worked and what is left
I built and tested TrailNAV part by part. This is an honest record of where it stands.
What worked
- The GPS module acquires satellites and gives my real-time location.
- The XIAO ESP32-C6 reads the modules and processes the navigation data correctly.
- The components communicate with each other over the bus.
- The battery and solar panel supply power and keep the device running.
- The enclosure is printed and the solar panel and screen fit inside it.
- The basic prototype works in simple indoor tests.
What is still to do
- Finish the firmware that reads the GPS and compass and draws the route and heading on the E-Ink display.
- Run a full outdoor field test along a real trail.
What has not worked yet
- The GPS accuracy is not fully stable in every location.
- Some sensor readings are not always consistent.
- Solar charging is slow when the sunlight is low.
My demo video of TrailNAV finding location and showing direction outdoors
The assembled TrailNAV device working during the field test
8. Presentation
My final presentation slide summarises TrailNAV on one page, and the one minute video shows the device and how it works.