System Integration - Assignment:
System Integration week is about stepping back from individual components and evaluating the project as a whole. The goal is no longer to make a single subsystem work in isolation, but to ensure that all mechanical, electronic, and software layers communicate and coexist within a unified, functional device. This includes documenting a clear integration plan, validating the connections between components, addressing packaging and physical assembly, and presenting the project in a state that resembles a finished product rather than a collection of parts. For a wearable device like this one, where ergonomics, compactness, and reliability are critical, system integration is the phase where the design either holds together or reveals where further iteration is needed.
System Integration Plan
The central challenge of this week was to think of the wearable not as a collection of independent components, but as a unified system where mechanical, electronic, and software layers work together coherently. The integration plan defines how each subsystem connects to the others, what role each component plays in the data pipeline, and how the physical packaging brings everything into a single wearable form factor suitable for long-term patient use.
At the core of the system sits the Seeed Studio XIAO nRF52840 Sense, which acts as the central processing unit. All sensors communicate with it through an I2C bus: the onboard 6-axis IMU provides raw accelerometer and gyroscope data, the external BNO08X magnetic sensor adds a third axis of orientation tracking, and the MAX30102 pulse oximeter delivers real-time heart rate and SpO2 readings. The SH1106 OLED display is also connected via I2C, receiving processed data from the microcontroller to present a simplified visual interface to the user. The vibration motor is driven by a digital output pin and serves as the haptic feedback channel for threshold alerts. Power is supplied by a 3.7V 100mAh LiPo battery, managed through the XIAO's onboard charging circuit.
Electronic Design and PCB
The schematic for the system was developed in KiCad, where all component interconnections were formally defined. The design consolidates the I2C lines into a shared bus, with each peripheral addressed independently by the firmware. Pull-up resistors were placed on the SDA and SCL lines to ensure signal integrity across all connected devices. The vibration motor driver circuit includes a flyback diode to protect the microcontroller from inductive kickback.
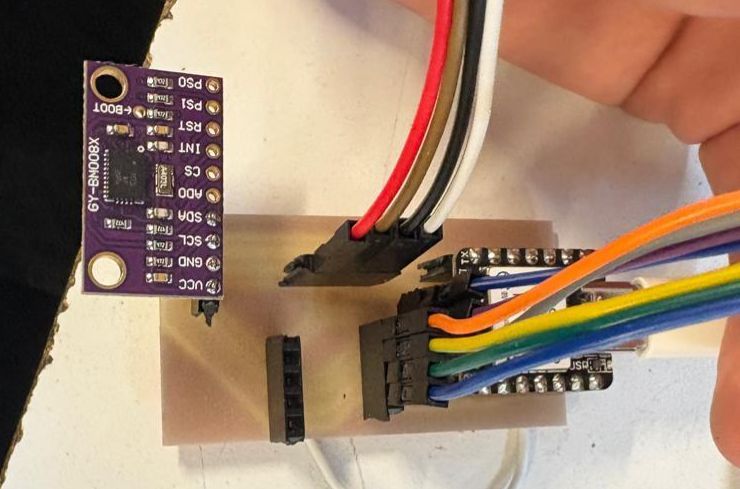
For the purposes of system validation, a preliminary rigid PCB was fabricated as an intermediate testing platform. This board is not the final form factor intended for the wearable — the production version will be implemented on a flexible copper tape substrate to conform to the curvature of the wrist — but it served a critical role in verifying that all components communicate correctly and that the firmware behaves as expected under real hardware conditions. Using this rigid board, the XIAO nRF52840, the onboard IMU, the MAX30102, the BNO08X magnetometer, the OLED display, and the vibration motor were all confirmed to be functional and correctly integrated.
Integration Visual Evidence
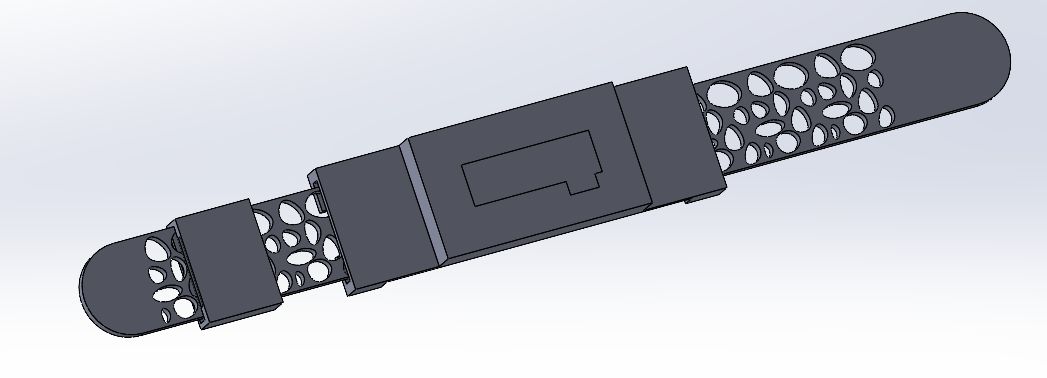
The following images document the current physical state of the integrated system. The prototype PCB consolidates the XIAO nRF52840 Sense, BNO08x, MAX30102, OLED display, and vibration motor driver into a single testable unit. The SolidWorks CAD model defines the housing envelope, internal pocket geometry, and display window cutout that will contain this assembly in the final wearable configuration.
Firmware and Data Pipeline
The firmware architecture follows a sequential acquisition and processing loop. On each cycle, the microcontroller reads raw acceleration and angular velocity vectors from the IMU, queries the MAX30102 for the latest heart rate and SpO2 sample, and updates the OLED display with the current values. The motion analysis layer focuses on computing Jerk — the rate of change of acceleration over time — as the primary indicator of movement quality. Smooth, controlled movements produce low and consistent jerk values, while tremors or erratic motor activity generate sharp spikes that can be detected and quantified.
Packaging and Mechanical Design
The physical housing of the wearable was designed in SolidWorks, with the primary objective of achieving a compact, ergonomic enclosure that can contain the PCB, battery, and display module while remaining comfortable for extended wear on the wrist or forearm. The housing is conceived as a single unified body manufactured in flexible TPU, a material selected for its ability to conform to the natural curvature of the user's arm and absorb mechanical stress without fracturing.
The closure mechanism relies on embedded magnets, which serve as the primary fastening method for securing the bracelet around the wrist. This approach was chosen over traditional buckles or velcro for two reasons: it allows for tool-free donning and removal, which is especially important for patients with reduced motor dexterity, and it provides a clean, flush exterior surface that contributes to the finished product aesthetic. The magnet positions are being incorporated into the final CAD revision of the housing.
Physically Implemented Packaging
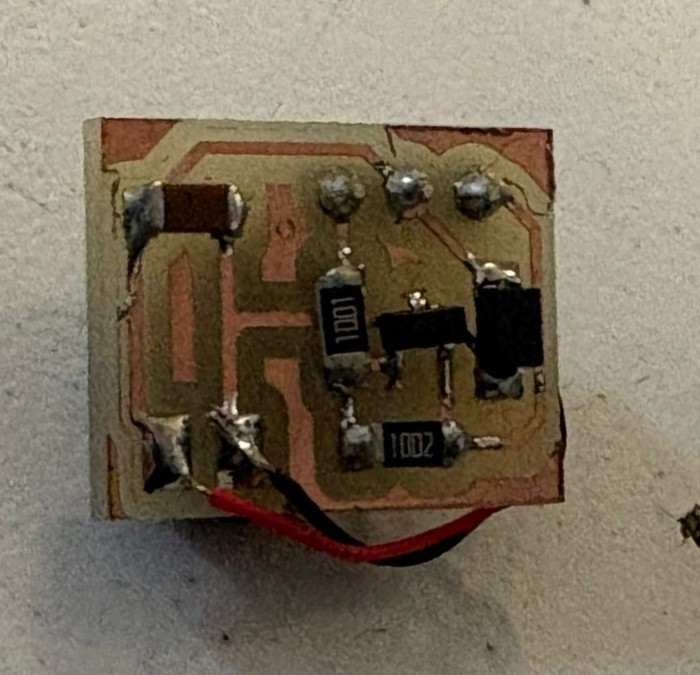
At the current fabrication stage, the following packaging elements have been physically produced and validated. The custom SMD motor driver PCB was fabricated with an NPN transistor configuration (R1 = 1 kΩ base resistor, R2 = 10 kΩ pull-down, C1 = 4.7 µF decoupling capacitor, D1 = 1N4148 flyback diode) and confirmed to drive the DC motor correctly without back-EMF affecting the microcontroller. The LiPo battery connects to the XIAO's onboard JST charging circuit, and all I2C peripherals share the common bus routed across the board. An initial packaging test was also conducted using a flexible copper tape substrate, which defined the routing layout and component footprints before soldering. Although this approach was ultimately replaced by the rigid PCB for validation purposes, it served as a physical reference for the wearable form factor and confirmed the spatial feasibility of the component arrangement on the forearm.

The CAD model currently defines the overall envelope dimensions, the internal pocket geometry for component placement, and the display window cutout for the OLED. The physical print of the housing in TPU is the immediate next step in the fabrication timeline, to be completed in parallel with the flexible PCB production. Together, these two elements — the flexible electronics substrate and the compliant TPU shell — form the final integrated package of the wearable system.
System Integration Status
At this stage of the project, the following elements are complete and validated: the full electronic schematic in KiCad, the preliminary rigid PCB with functional firmware running on the XIAO nRF52840, sensor confirmation for the IMU, MAX30102, OLED, and vibration motor, and the SolidWorks CAD model of the wearable housing. The elements currently in progress are the flexible PCB fabrication, the TPU housing print, the TLE493D magnetometer integration, and the AI-based scoring model. The system architecture is fully defined and the integration path is clear; the remaining work is execution and physical assembly.