

Week 17
Applications and Implications, Project Development
// MAIN OBJECTIVE \\
Answer the following questions.
Applications and Implications: Project Q&A
What will it do?
My final project consists of an autonomous drone built entirely from scratch. It features a custom flight controller using an ESP32-C6 microcontroller with a PID stabilization system to maintain stable flight. The drone incorporates a 4-axis thrust vectoring tilting mechanism and will be remotely controlled using a custom-made remote control over an ESP-NOW wireless communication protocol.
Who has done what beforehand?
While there are numerous open-source drone projects (such as ArduPilot or Betaflight) and commercially available flight controllers, building a drone completely from scratch using an ESP32-C6, programming the PID algorithms from zero using C with ESP-IDF and FreeRTOS, and integrating a custom thrust vectoring system is a highly specialized approach. Most hobbyists rely on off-the-shelf PCBs, but I'm designing the full architecture (hardware and software) independently.
What sources will you use?
My primary sources include the official Espressif ESP-IDF documentation for the ESP32-C6 and ESP-NOW protocol, FreeRTOS documentation for task management, and the technical datasheets for the BMI-160 gyroscope and RS2205 brushless motors. I am also relying on control theory literature to properly implement and tune the PID loops.
What will you design?
I am designing multiple integrated systems:
- Electronics: A custom "Death Star" themed flight controller PCB and a secondary PCB for the remote control.
- Structure: A 3D-printed chassis and thrust vectoring mounts for the motors.
- Software: The embedded C firmware incorporating the PID stabilization logic and ESP-NOW wireless communication.
What materials and components will be used?
Based on my current Bill of Materials, the project requires:
| Qty | Description | Price (USD) | Category |
|---|---|---|---|
| 1 | Microcontroller ESP32-C6 | $ 18.00 | Electronics |
| 4 | Brushless Motors Rs2205 + ESCs | $ 90.00 | Propulsion |
| 1 | BMI-160 Gyroscope | $ 6.00 | Sensors |
| 1 | 4S LiPo Battery (14.8V) | $ 25.00 | Power |
| 1 | Energy Regulator and ESC holder | $ 10.00 | Power |
| 1 | Sunulu PLA filament coil | $ 20.00 | Structure |
| - | Total | $ 169.00 | Investment |
Where will they come from?
The electronic components (PLA, microcontrollers, motors, ESCs, IMUs, and batteries) are sourced from online distributors which are AliExpress for the microcontrollers, Mercado Libre for the PLA and Amazon for the rest of the components. The PCB and SMD components are obtained at the FabLab using locally sourced copper FR1 boards for milling.
How much will they cost?
The estimated total cost of the drone components is approximately $169.00 USD. This includes $18 for the ESP32-C6, $90 for the motors and ESCs, $6 for the IMU, $25 for the LiPo battery, $10 for power regulation, and $20 for filament (complete coil).
What parts and systems will be made?
Almost every part of the system will be fabricated:
- Structural System: The 3D printed drone frame and motor mounts.
- Electronic System: Milled and soldered custom flight controller PCB.
- Control System: Wearable glove for intuitive remote piloting.
What processes will be used?
The fabrication relies heavily on:
- 3D Modeling: SolidWorks for chassis and mechanical design.
- Additive Manufacturing: 3D printing (FDM) with PLA.
- Electronics Design: PCB layout and routing.
- Subtractive Manufacturing: CNC milling using the Roland Monofab and the modsproject page for the PCBs.
- Embedded Programming: Using C, ESP-IDF, and FreeRTOS.
What questions need to be answered?
There are several engineering challenges to resolve:
- How to optimally tune the PID controller for stable flight? (Working on it in the wildcard week).
- How to minimize wireless latency between the control PCB and the drone using ESP-NOW?
- How to perfectly balance the center of gravity given the weight of the 4S LiPo battery?
How will it be evaluated?
The project will be considered a success if the drone can:
- Achieve stable, autonomous hovering using the custom PID control loops without oscillating out of control.
- Establish a reliable, low-latency connection via ESP-NOW.
- Respond accurately to directional inputs sent from the custom remote control PCB.
- Sustain flight structurally without mechanical failure from the thrust or vibrations.
Things I have worked on
While developing the documentation, I have actively begun fabricating and assembling the physical components of the drone to ensure structural integrity and proper component fitment.
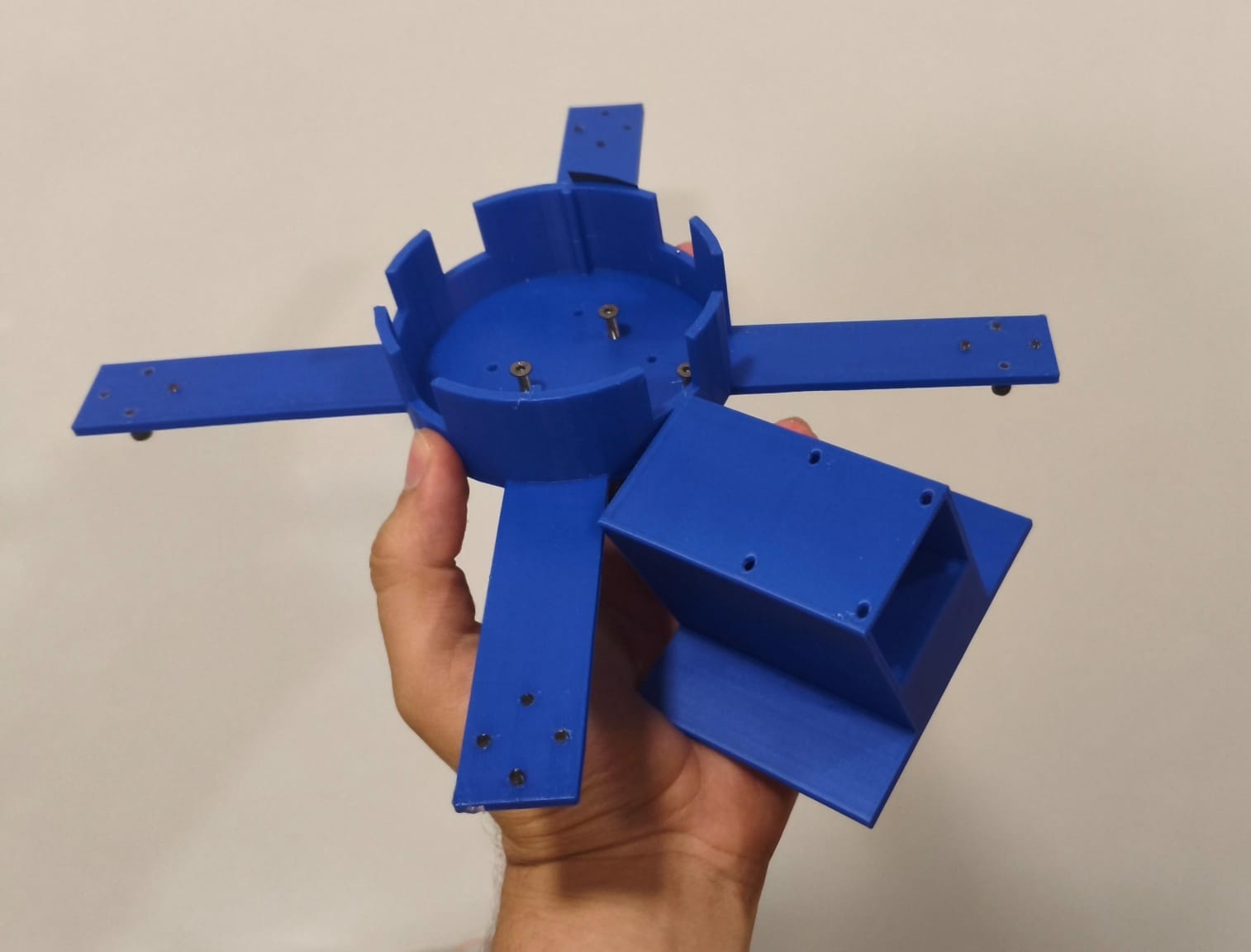
3D printed parts of the drone chassis.

Custom cover designed to hold the ESCs.

Assembly of the first drone prototype.
Note: If you want to see the detailed process, documentation, and further updates, please visit my Final Project page!