Week 15 - System Integration
This week, we focused on system integration. The assignment encouraged us to consider how we would connect every component of our final projects, rather than simply bolting everything together.
Work log
Completed tasks
- Wrote an application for an embedded board I made.
- Used the application for controlling an output and reading an input related to my final project.
Materials for the mechanical structure
| Item | Quantity | Details |
|---|---|---|
| Hyper PLA | 2 Kg | Used for the main structural components. |
| TPU-95HF | 1Kg | Used for compliant appendages and wheel-leg pads. |
| 3 mm x 30 mm aluminum bars | 10 units | Used as a guiding element for the linear actuators. |
| Aluminum couplers | 4 units | Used for connecting the PLA wheel-legs to the DC motor metallic shaft. |
| M3 x 20 mm PCB Copper Spacers | 8 units | Used for separating the upper and lower PCBs. |
| M3 x 10 mm PCB Copper Spacers | 4 units | Used for separating the upper and lower PCBs. |
| 3 x 18650 Battery holder | 1 unit | Used for holding the batteries that power the entire system. |
| 12-volt Micrometal DC motor with encoder | 4 units | The motor torque should be 2.2 kg x cm in order to fully move the system. |
| 12-volt Micrometal DC motor with M3 x 30 mm worm screw with hexagonal nut. | 4 units | This motor is used for the linear actuators and should have a torque of 2.2 kg x cm. |
| Limit switch sensor | 8 units | This sensor is used to detect the position of the linear actuators. |
| M2 x 20 mm screw | 20 units | These screws are used to secure the limit switch sensors and the camera. |
| M3 x 20 mm screw | 160 units | These screws are used to secure assembled the wheel-legs and PCBs into the robot structure. |
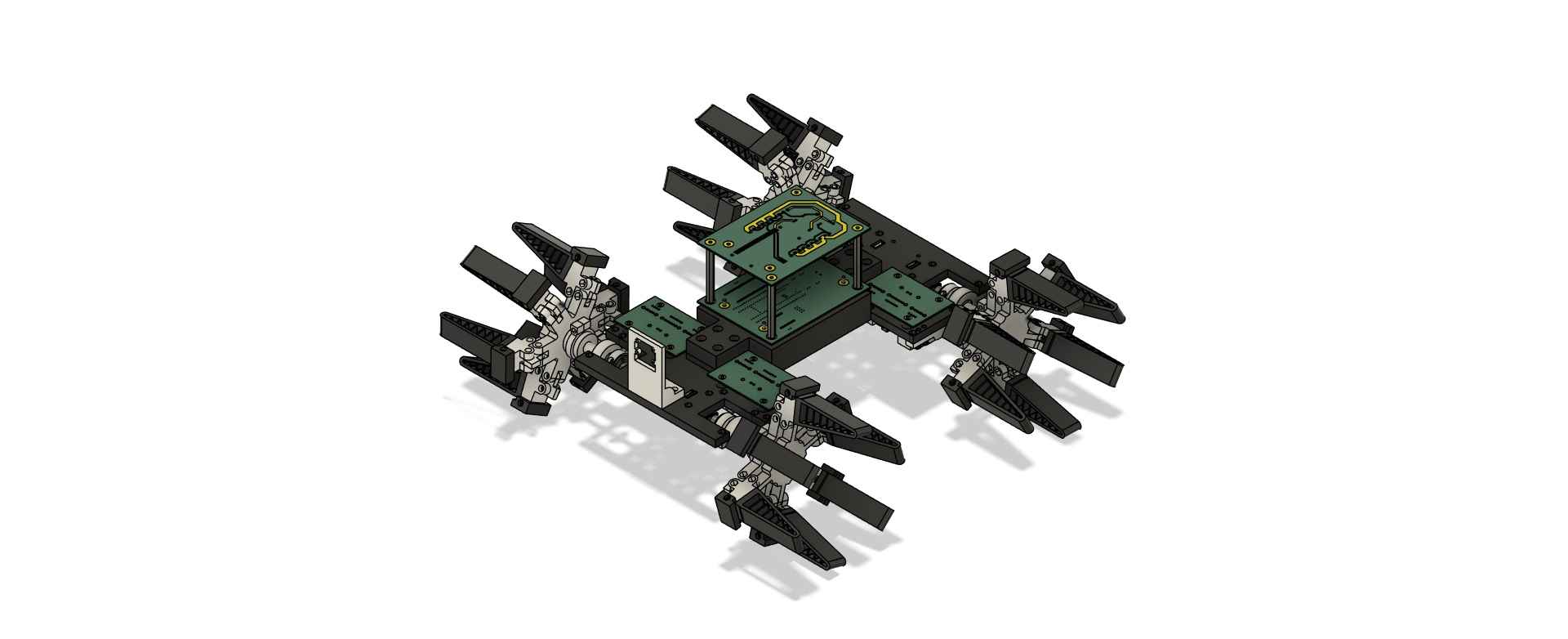
Third iteration of the robot, PCBs were bolted on top of the mechanical structure instead of proper assembly.
Files
Here are the downloadable files for this week:
Sources codes for this week