FAB Academy 2026
About Me
Weekly Work
Final Project
Studen Agreement
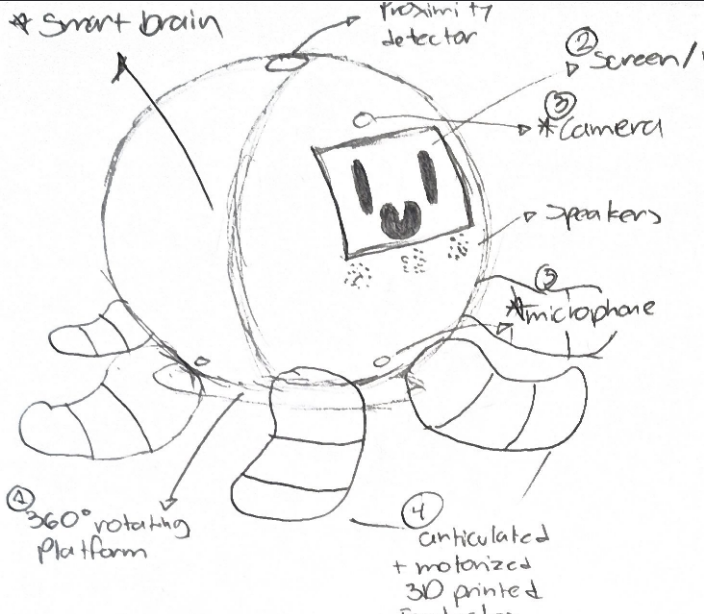
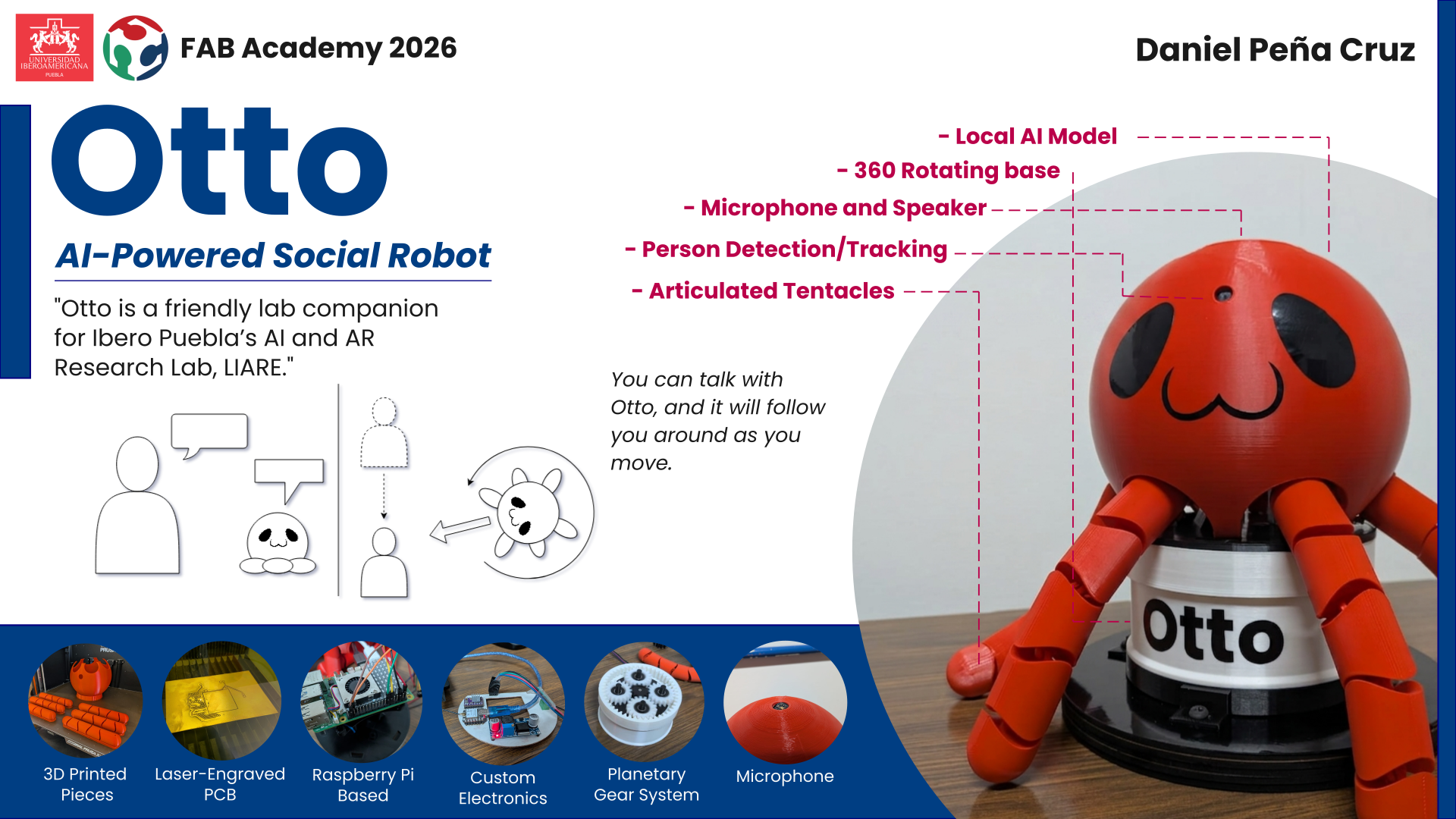
Otto
AI-Powered Social Robot
Project Overview
Planning
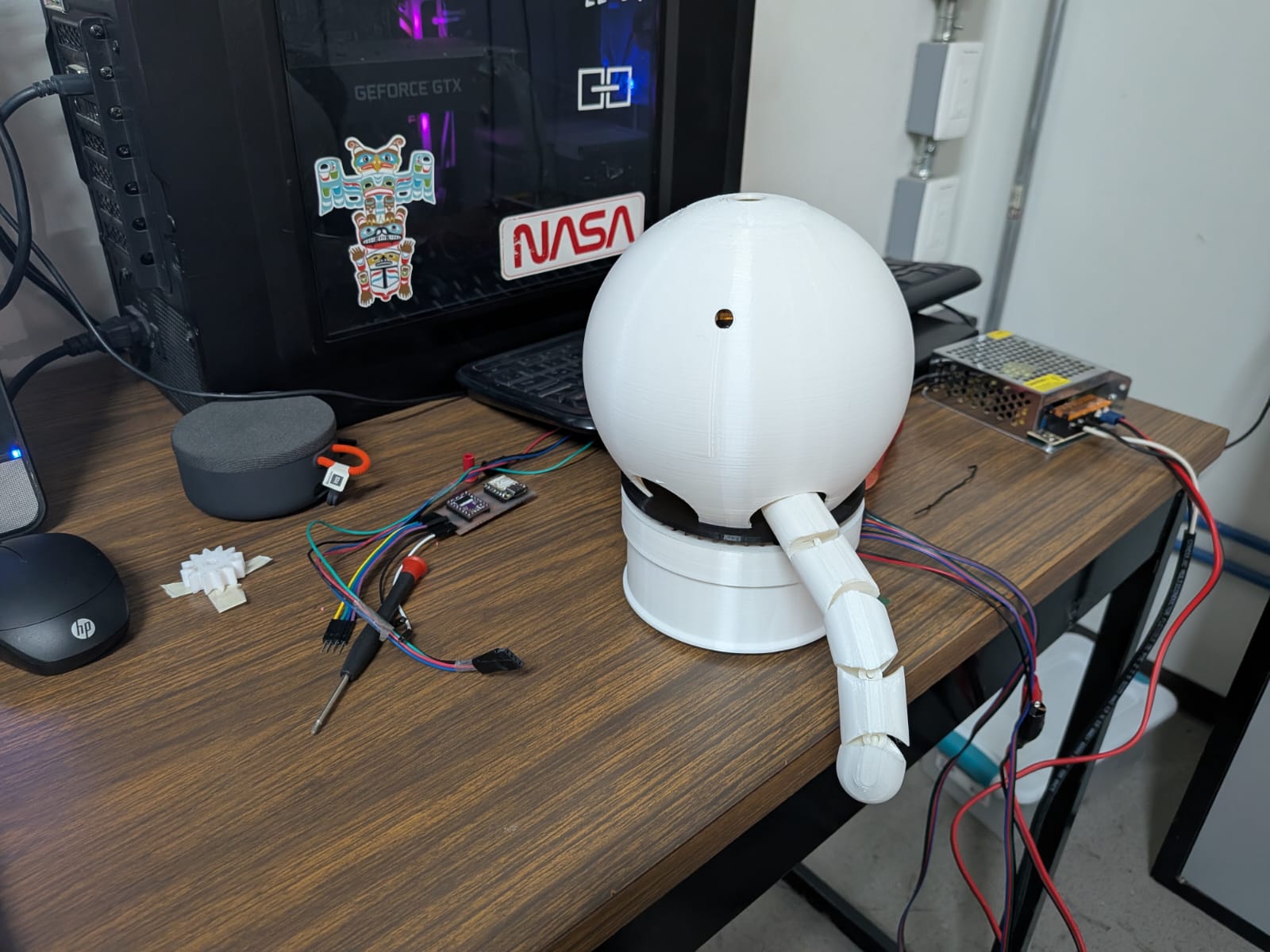
Development
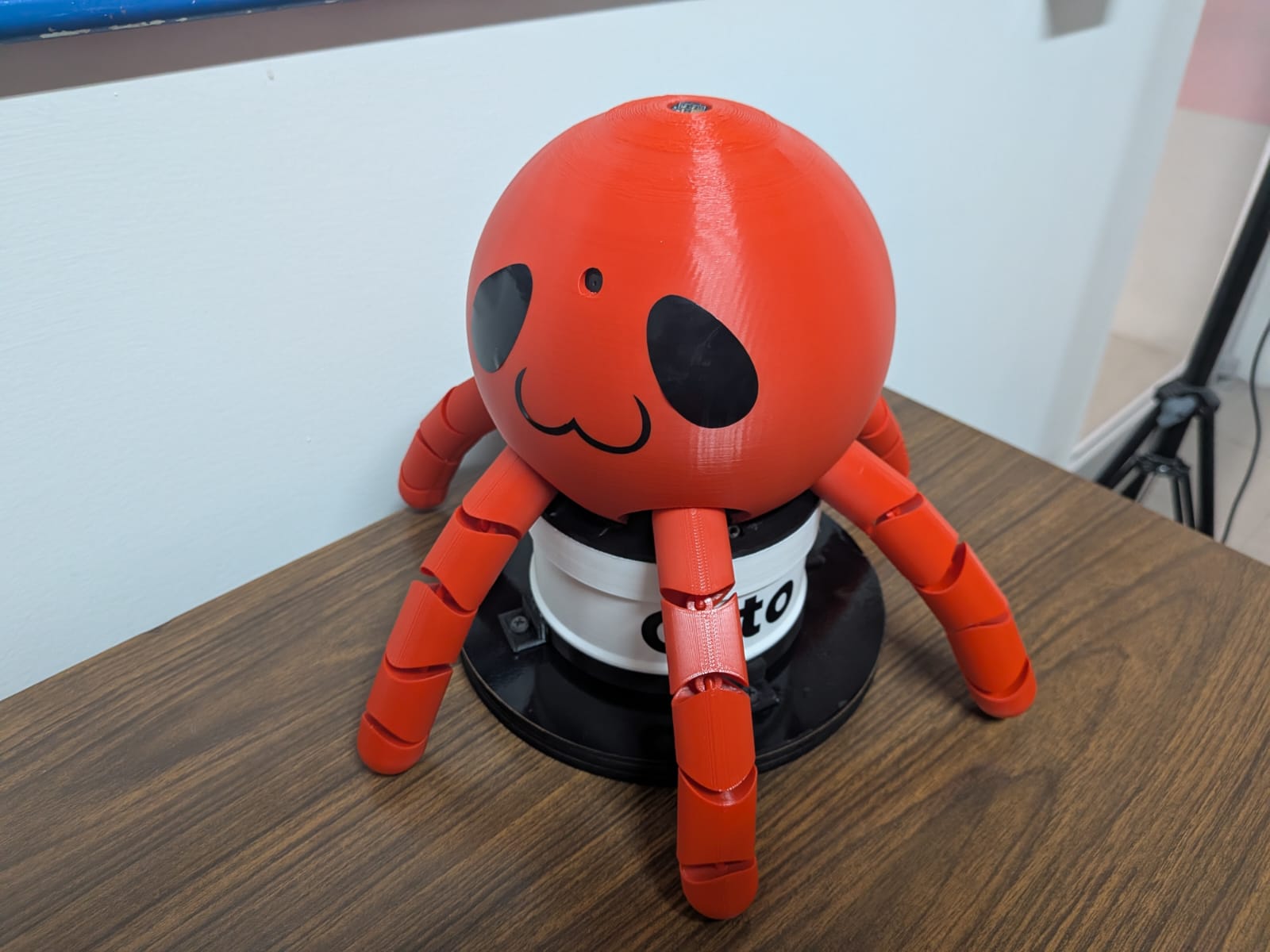
Results
Presentation Slide
Project Video