
Week 18 | Applications and Implications
1. What does the project do?
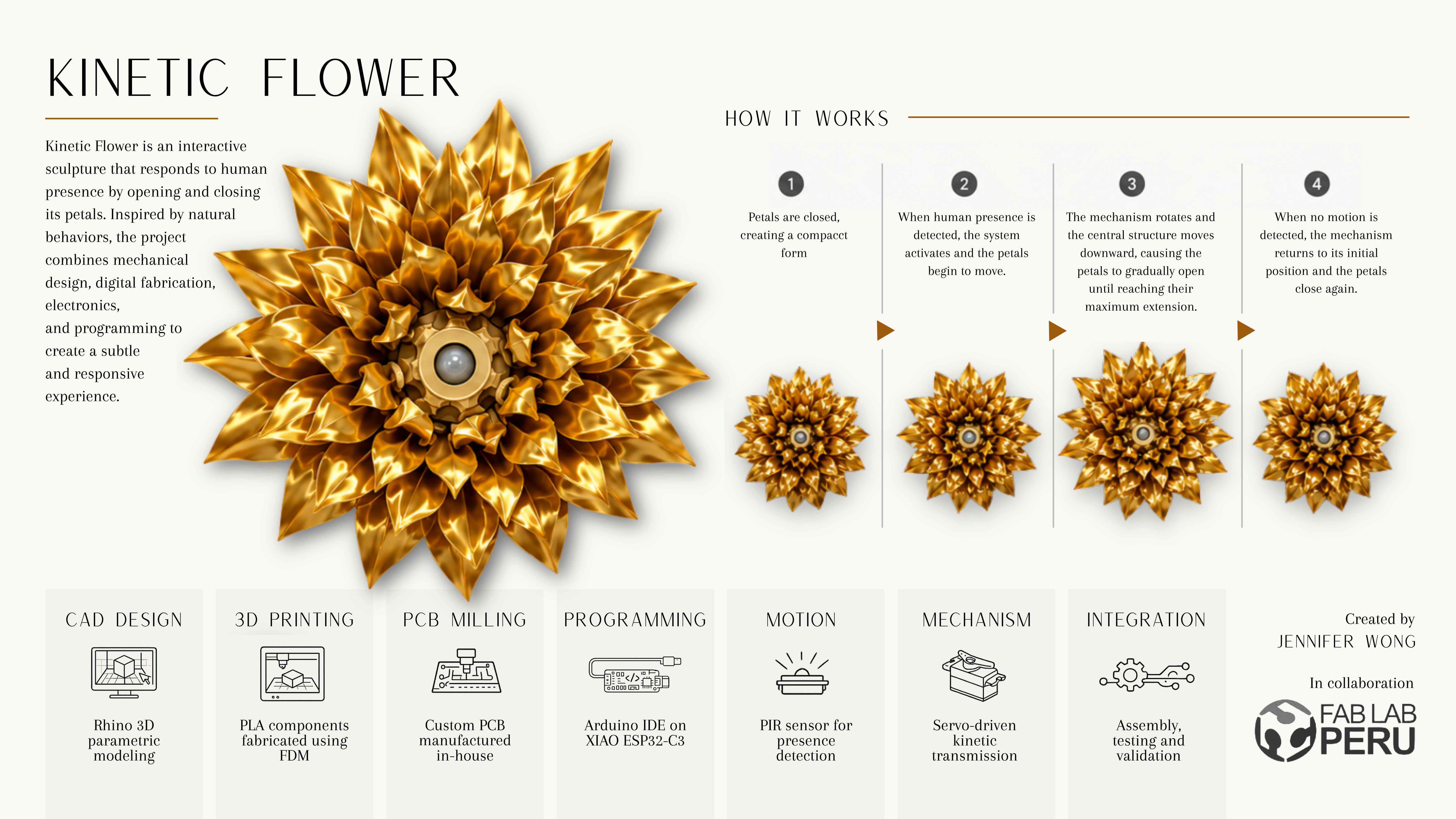
The project develops an interactive kinetic flower that responds to human presence through motion. The system uses a PIR sensor to detect movement and a servo motor to actuate a central mechanism that controls the opening and closing of the petals.
Beyond its mechanical function, the system is designed to generate a sensory and emotional response. The interaction is simple but intentional: the object remains static until a person approaches, at which point it activates and produces movement. This behavior transforms the object from a passive element into an interactive system.
The project can function as:
- An interactive art object.
- A demonstrator of embedded systems and digital fabrication.
- A prototype for future installations or responsive environments.
2. Who has done what beforehand?
Previous work in kinetic art, interactive installations, and biomimetic design has explored the relationship between movement, sensors, and user interaction. Within Fab Academy, several projects have investigated flower-inspired mechanisms and responsive systems combining electronics, motion, and digital fabrication.
The Mechanical Blooming Flower – Fab Academy 2016
This project was one of the initial references explored during the conceptual stage of development. The proposal presents a mechanical flower actuated through a servo system capable of generating opening and closing movements.
Although the mechanism and overall integration are relatively simple, the project served as an important starting point to understand how flower-inspired movement could be translated into a digitally fabricated kinetic object. It also demonstrated the feasibility of combining servo actuation, embedded electronics, and fabricated structures within an interactive prototype.
The reference was particularly useful during the early stages of the project to analyze fundamental movement principles, petal actuation strategies, and the relationship between organic inspiration and mechanical behavior.
Breath of Flora – Fab Academy 2020
This project investigated interactive floral installations capable of responding to environmental or user interaction through embedded sensing systems and actuation.
The work is relevant because it approaches flowers not only as mechanical objects but also as experiential and spatial elements capable of generating emotional or atmospheric interaction. The integration of movement, lighting, and responsiveness contributes to the creation of immersive interactive experiences.
The project also demonstrates how digital fabrication, electronics, and artistic expression can be combined within Fab Academy projects to create responsive installations inspired by natural systems.
Kinetic Cover Inspired by Flowers – Fab Academy 2022
This project explored biomimetic movement inspired by flowers and organic geometries through digitally fabricated kinetic systems.
The proposal focused on the relationship between geometry, movement, and transformation, using mechanical systems capable of simulating behaviors found in nature. The project demonstrates how biological references can inform responsive architectural and mechanical solutions.
It also provides relevant insights into parametric thinking, structural movement, and the design of articulated systems capable of controlled transformation through actuation mechanisms.
Together, these references demonstrate how Fab Academy projects frequently combine digital fabrication, embedded electronics, mechanics, and biomimetic inspiration to create responsive systems and interactive experiences.
3. What sources were used?
The project was developed using technical documentation, previous Fab Academy projects, and manufacturer resources related to digital fabrication, electronics, and programming.
- Fab Academy documentation and previous student projects related to kinetic mechanisms and interactive installations.
- Rhino 3D documentation and tutorials for CAD modeling and geometry development.
- Bambu Lab A1 and Bambu Studio documentation for FDM 3D printing preparation.
- KiCad documentation for PCB design and electronic schematic development.
- Arduino IDE documentation for embedded programming.
- XIAO ESP32-C3 technical documentation for pin mapping and microcontroller configuration.
- PIR sensor and servo motor datasheets for input and output integration.
4. What was designed?
The project involves the design of an interactive kinetic flower that combines mechanical movement, digital fabrication, electronics, and embedded programming. Rather than using existing solutions, several custom elements were developed specifically for this project.
- Petal geometry: a layered petal system designed to create a natural opening and closing motion.
- Kinetic mechanism: a custom motion transmission system that converts servo rotation into coordinated petal movement.
- Structural architecture: internal supports, guides, joints, and mounting features designed for assembly and motion control.
- Electronic system: a custom PCB integrating the microcontroller, sensor, actuator, switch, and status LED.
- Embedded behavior: the control logic responsible for detecting human presence and triggering the flower's response.
- System integration: the complete integration of mechanical, electronic, and structural components into a single interactive artifact.
5. What materials and components were used?
The project combines mechanical, electronic, and structural elements fabricated through digital manufacturing processes. The following materials and components are used to build the final prototype.
Mechanical and Structural Components
- 3D printed PLA petals.
- 3D printed petal supports.
- 3D printed central mechanism.
- 3D printed servo coupling components.
- Fasteners and assembly hardware.
Electronic Components
- XIAO ESP32-C3 microcontroller.
- PIR motion sensor.
- Servo motor.
- Custom PCB.
- Status LED.
- Power switch.
- External battery pack with integrated USB power board.
- Battery pack and wiring.
6. Where did they come from?
| Component | Source |
|---|---|
| XIAO ESP32-C3 | Seeed Studio / local electronics supplier |
| Servo Motor | Local electronics supplier |
| PIR Sensor | Local electronics supplier / Fab Lab inventory |
| Push Button Switch, LED, Resistors, Wiring and Connectors | Local electronics supplier / Fab Lab inventory |
| Custom PCB Materials | Fab Lab inventory |
| PLA Filament | Fab Lab inventory |
| Battery and Power Components | Local electronics supplier |
| Screws, Fasteners, Adhesives and Finishing Materials | Local hardware supplier |
7. How much did they cost?
The estimated cost corresponds to the development of a single functional prototype and includes electronic components, digital fabrication materials, structural elements, assembly hardware, and prototyping supplies. Fabrication equipment such as 3D printers, soldering tools, and laboratory machines were accessed through the Fab Lab infrastructure and are therefore not included in this estimation.
| Component | Description | Quantity | Approx. Total Cost (USD) |
|---|---|---|---|
| XIAO ESP32-C3 | Main microcontroller | 1 | $8 |
| Servo Motor | Petal actuation system | 1 | $6 |
| PIR Sensor | Motion detection | 1 | $3 |
| Push Button Switch | System activation control | 1 | $1 |
| LED + Resistor | Visual feedback system | 1 set | $1 |
| Custom PCB | Embedded electronics board | 1 | $5 |
| Battery | Portable power supply | 1 | $10 |
| Wiring and Connectors | Internal electronic connections | 1 set | $4 |
| PLA Filament | Structural and mechanical printed parts | 1 kg | $25 |
| Screws and Fasteners | Mechanical assembly | 1 set | $3 |
| Adhesives and Finishing Materials | Assembly and finishing | 1 set | $5 |
| Miscellaneous Components | Prototyping and testing materials | 1 set | $5 |
| Estimated Total Cost | $76 | ||
8. What parts and systems were made?
The final project is composed of several interconnected parts and systems that were designed, fabricated, programmed, and integrated during the development process.
- Petal system: layered petals that create the visual opening and closing effect.
- Mechanical transmission: a custom mechanism that converts servo rotation into coordinated petal movement.
- Structural components: 3D printed supports, guides, connectors, and internal parts.
- Custom PCB: an embedded electronics board for connecting the microcontroller, sensor, actuator, switch, and LED.
- Sensing system: a PIR sensor used to detect human presence.
- Actuation system: a servo motor used to drive the central mechanism.
- Control system: Arduino-based programming using the XIAO ESP32-C3.
- Integrated assembly: final enclosure, wiring, battery power, and complete system integration.
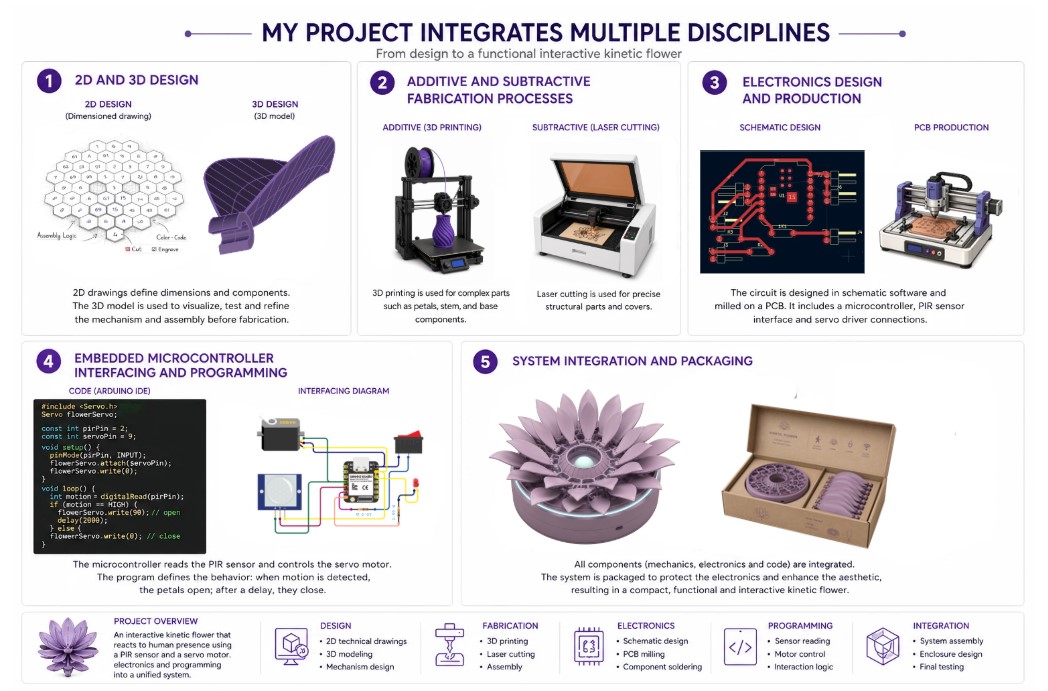
9. What processes were used?
The project combines multiple digital fabrication and embedded systems processes to design, manufacture, and integrate the final interactive flower prototype.
- CAD design: Rhino 3D was used to develop the petal geometry, mechanical components, structural supports, and assembly features.
- Rapid prototyping: cardboard prototypes were used during the early stages to evaluate movement, dimensions, and assembly concepts before fabricating the final parts.
- FDM 3D printing: the petals, mechanism, structural components, and enclosure elements were fabricated using PLA filament.
- Laser cutting: laser cutting was used to fabricate the project packaging and presentation elements.
- PCB design and fabrication: a custom PCB was designed and manufactured to connect the microcontroller, sensor, actuator, switch, and LED.
- Embedded programming: the XIAO ESP32-C3 was programmed using Arduino IDE to process sensor inputs and control the flower's behavior.
- System integration: mechanical, electronic, and software subsystems were assembled, tested, and refined into a fully functional prototype.
10. What questions needed to be answered?
Although the system is functional, several technical and design questions remain open:
- Mechanical performance: Is the movement smooth and consistent across all petals? Are there friction or alignment issues?
- Sensor reliability: How accurate is the PIR sensor under different lighting and environmental conditions? Does it generate false positives?
- System robustness: Can the system operate continuously without failure? How do components behave over time?
- Integration: How effectively are the electronic and mechanical systems synchronized?
- User experience: Is the interaction intuitive and engaging, or does it feel repetitive?
These questions define the next iteration of the project and highlight the transition from prototype to refined system.
11. How was it evaluated?
The project will be evaluated according to the performance of the complete integrated system, not only by the operation of each individual component.
- Reliable detection of human presence using the PIR sensor.
- Consistent opening and closing movement of the petals.
- Correct synchronization between sensor input, microcontroller logic, and servo actuation.
- Stable mechanical operation without excessive friction or misalignment.
- Clean integration of electronics, wiring, power supply, and structure.
- Autonomous operation using the integrated power source.
- Quality of the interaction and the perception of an organic response.
12. Remaining Tasks
- Refine the final documentation and connect the project development to the corresponding weekly assignments.
- Prepare and upload the final presentation slide.
- Edit and upload the final project video.
- Organize and publish the final design files, code, and fabrication files.
- Verify that all final project links are correctly included in the presentation schedule.
The project development has been documented through a structured schedule that tracks milestones, completed tasks, and upcoming activities. The complete timeline can be consulted in the project schedule. The remaining tasks are listed below.
13. Presentation Materials
As part of the final project development, a presentation board and preliminary video were created to communicate the project's objectives, technical implementation, and current level of completion. These materials summarize the design process and demonstrate the functionality of the integrated system developed throughout Fab Academy.
Preliminary Presentation Slide
The presentation slide provides a visual summary of the project, including the concept, design process, digital fabrication methods, electronics, programming, and system integration.
Preliminary Prototype Video
The prototype video presents the current functionality of the interactive flower, showing the opening and closing behavior achieved through the integration of the mechanical mechanism, PIR sensor, servo motor, and embedded control system.
14. Project Timeline (20 Days of may)
The final phase of the project includes design refinement, fabrication, system integration, and documentation. Additional work was required to complete the petal fabrication and shaping process.
| Task | Day 1-4 | Day 5-8 | Day 9-12 | Day 13-16 | Day 17-20 |
|---|---|---|---|---|---|
| Refine petal design | ● | ||||
| Print remaining petals | ● | ● | |||
| Heat-form petals | ● | ||||
| Adjust central mechanism | ● | ||||
| Servo integration | ● | ||||
| Build final structure | ● | ||||
| System validation | ● | ● | |||
| Process documentation | ● | ● | ● | ||
| Final documentation upload | ● |
The workflow includes overlapping stages, especially during fabrication, integration, and validation. Documentation is developed in parallel to ensure a complete and accurate final submission.
Final Reflection
This project represents a transition from conceptual design to a working interactive system. It required the integration of multiple disciplines, including digital fabrication, electronics, and mechanical design.
One of the main learnings is that the complexity of a system lies not in its individual components, but in how they interact. Achieving a functional result depends on the coordination between structure, movement, and control logic.
The project also highlights the importance of iteration. Each stage revealed new challenges, particularly in alignment, tolerances, and system integration. These challenges are part of the process of transforming an idea into a functional object.