
Exploration III: Petal Lifting Mechanism
1. Reference Mechanism Study
After identifying the limitations of the internal cable system, the project shifted toward the study of an existing kinetic reference. A lotus-shaped opening mechanism was used as a case study to better understand how layered components can generate coordinated petal motion.
Instead of copying the reference directly, the purpose of this stage was analytical. A printed reference prototype was used to observe how movement was distributed, how multiple petals could open in a synchronized way, and how relative displacement between levels could be translated into a visible transformation.
This study made it possible to break down the mechanism into clearer principles. First, the motion was not dependent on flexible pulling elements, but on rigid parts that moved in a guided sequence. Second, the opening of the petals was controlled by geometry and contact, not by uncontrolled deformation. Third, layering the components made it easier to separate structural support from moving elements.
The most important outcome of this stage was conceptual: it changed the way the mechanism was understood. Instead of thinking about the flower as a soft object that needed to be pulled open, the project began to approach it as a coordinated mechanical system in which motion could be distributed through structure, levels, and controlled points of contact.
2. Development of Petal Lifting Mechanism
Based on the lessons learned from the reference mechanism, a third mechanical iteration was developed. In this version, the project moved away from cable transmission and adopted a direct lifting logic.
The new idea was to use a central mechanism capable of moving vertically. This movement would then activate one point under or near each petal. In this way, the petals would no longer depend on tension or flexible routing, but instead on a defined contact relationship with the central moving structure.
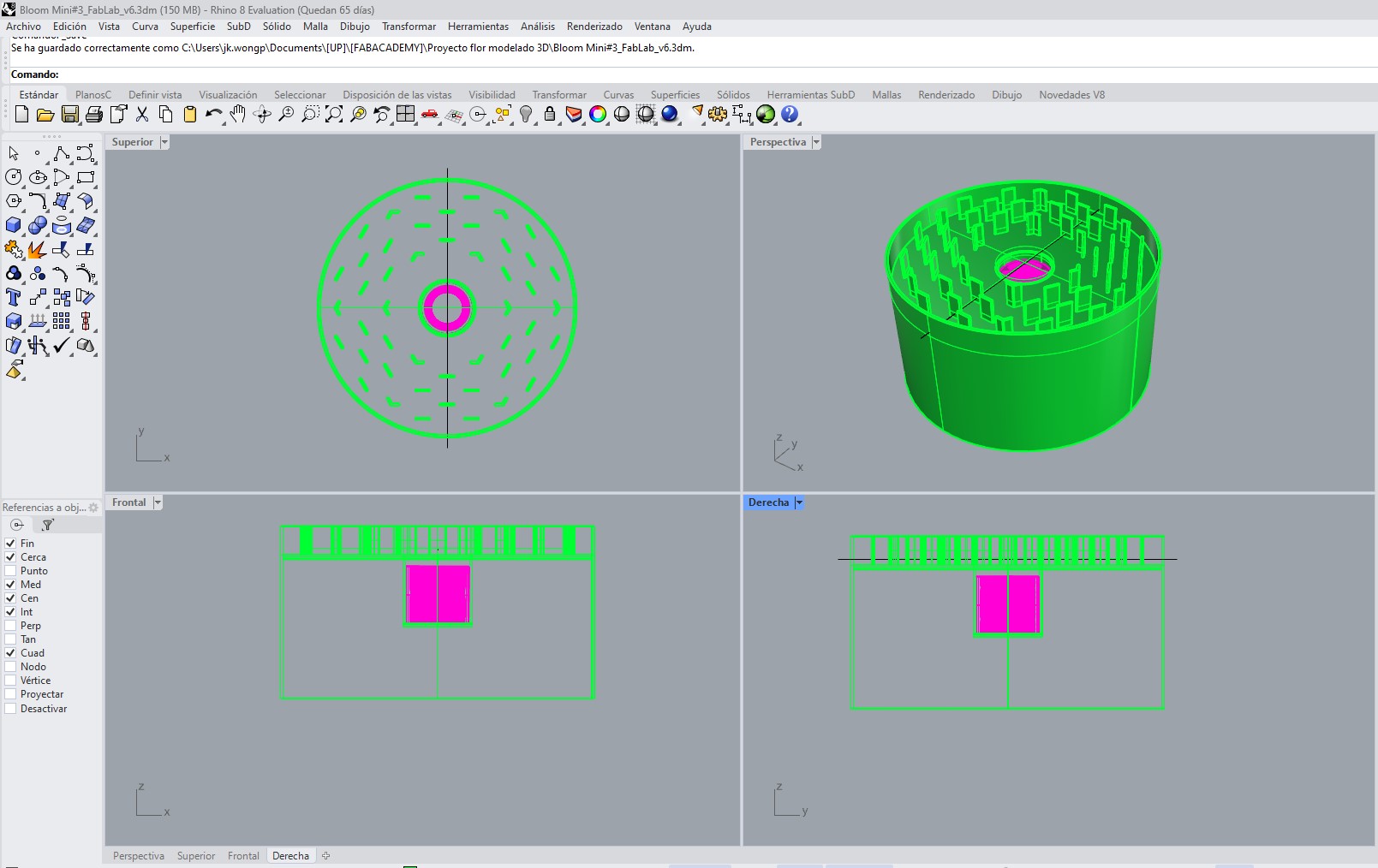
A central cylindrical structure was then introduced. This element acts as the main actuator, translating vertical motion into distributed mechanical responses across the system.
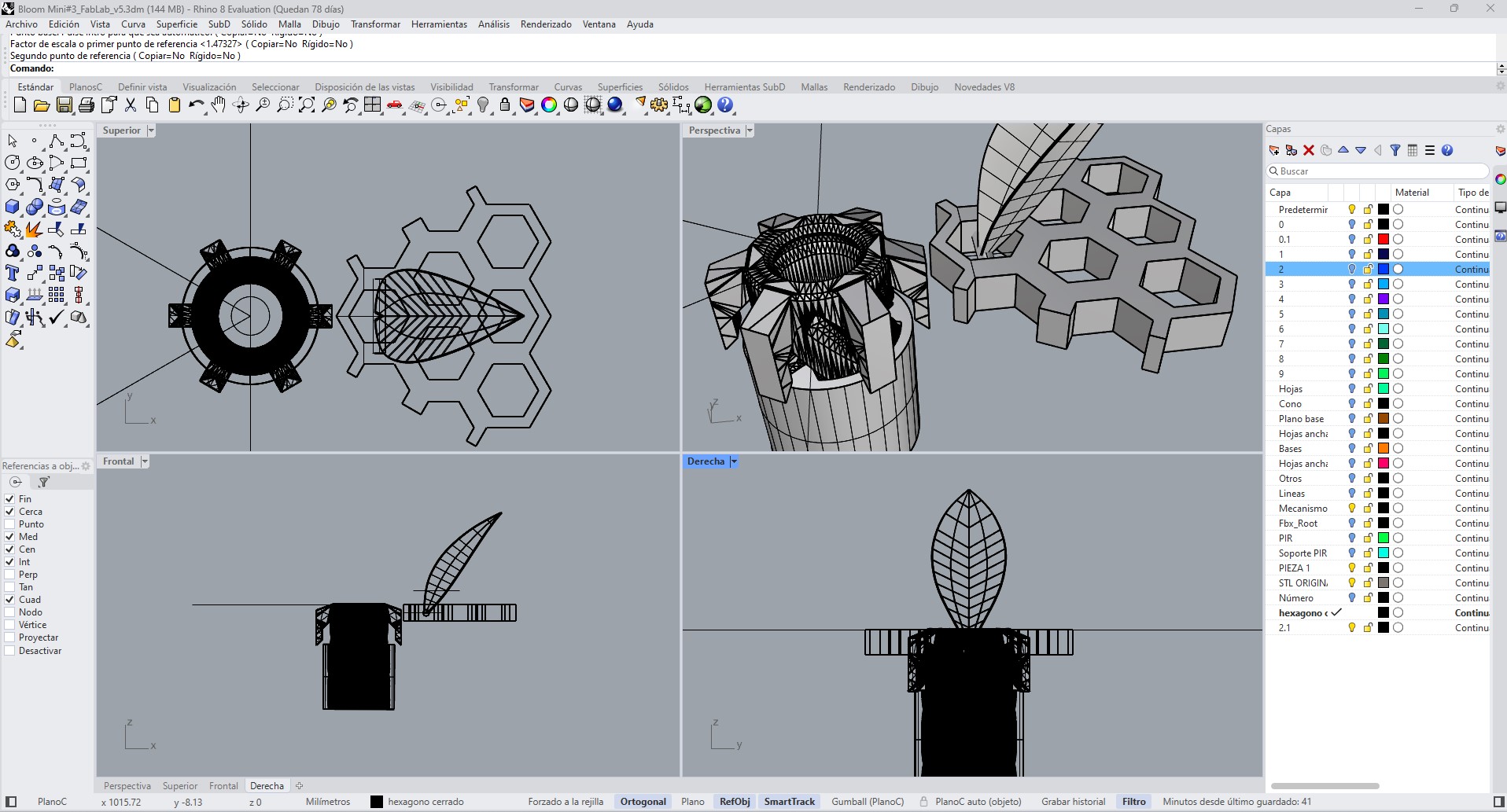
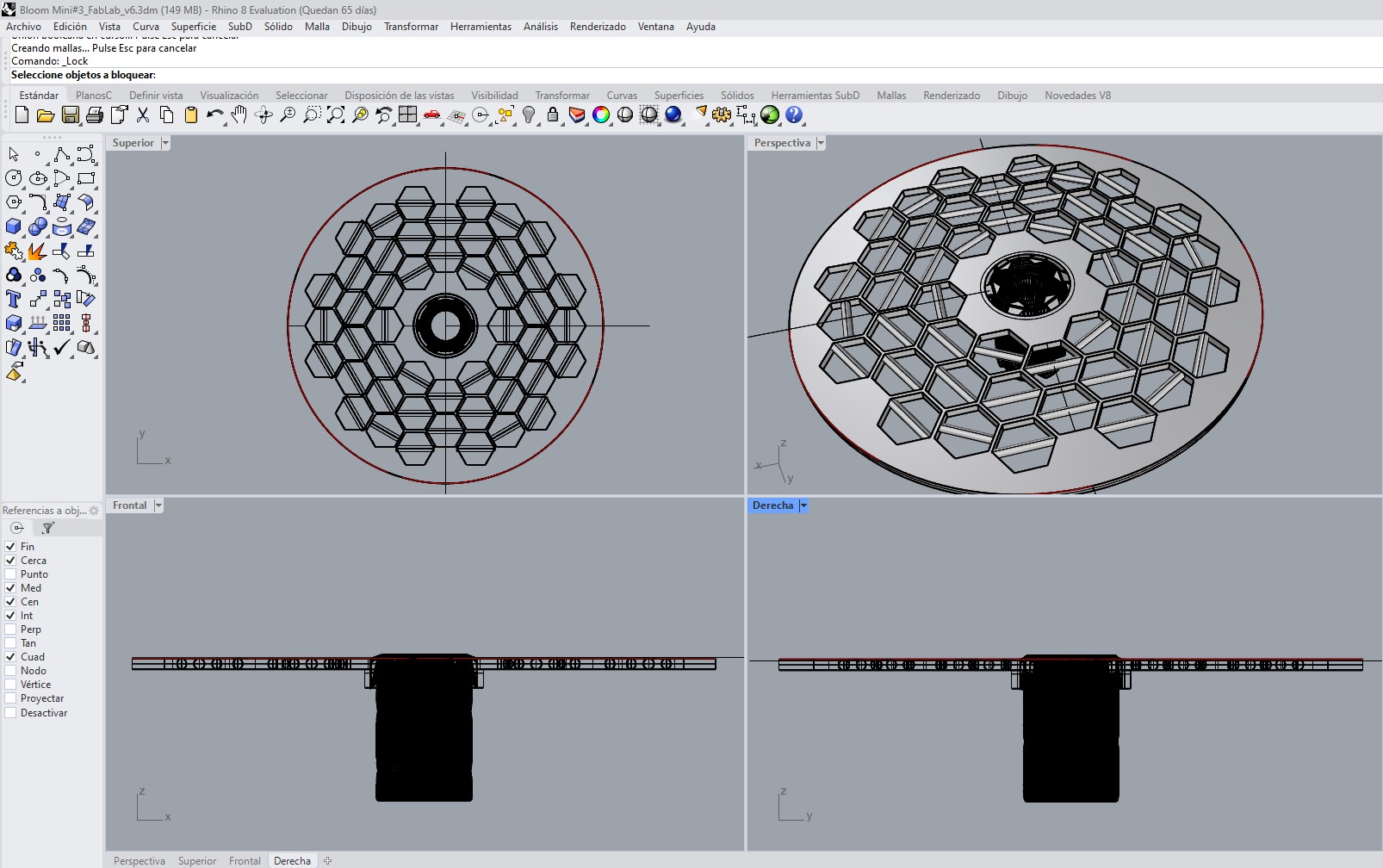
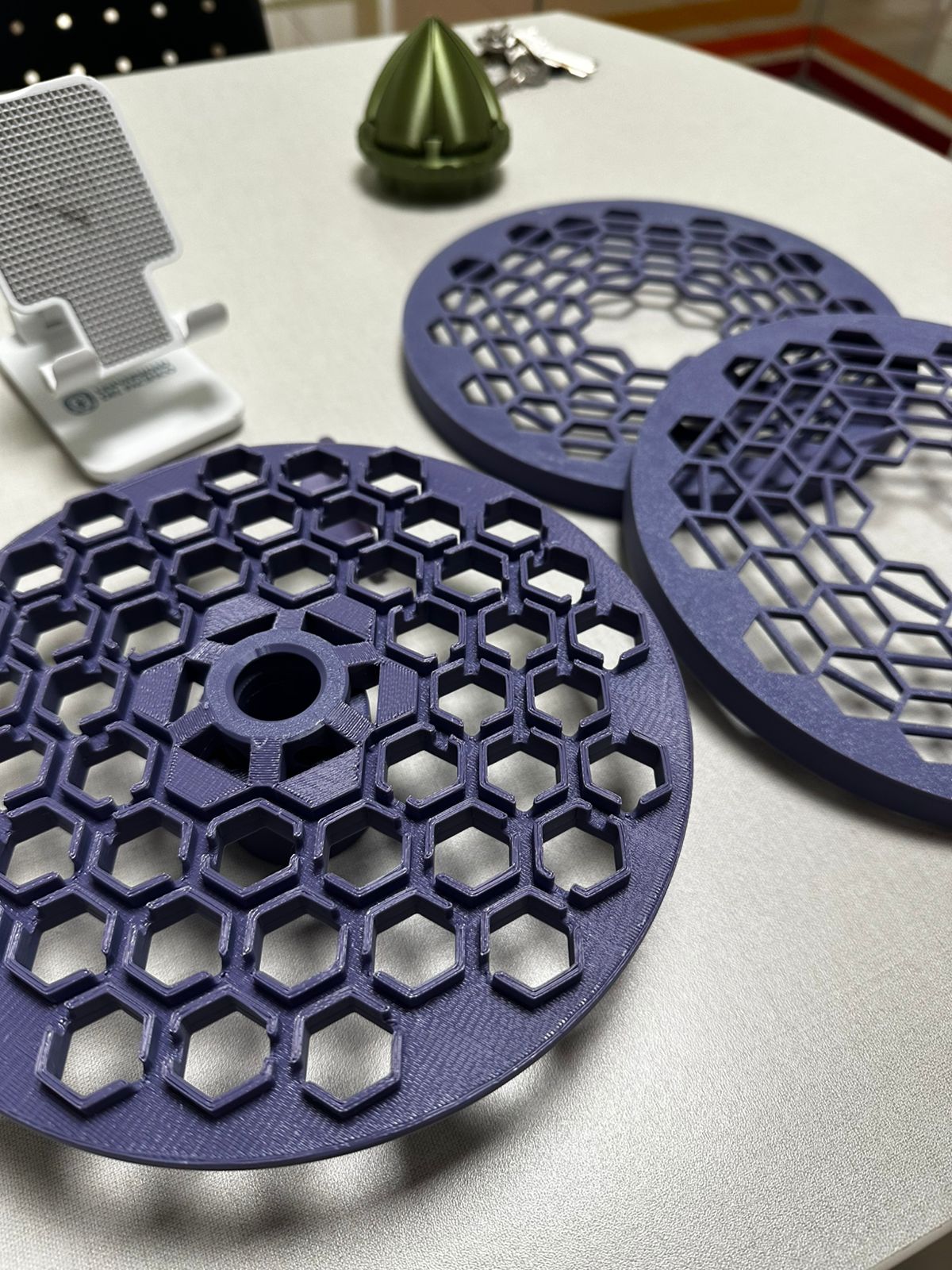
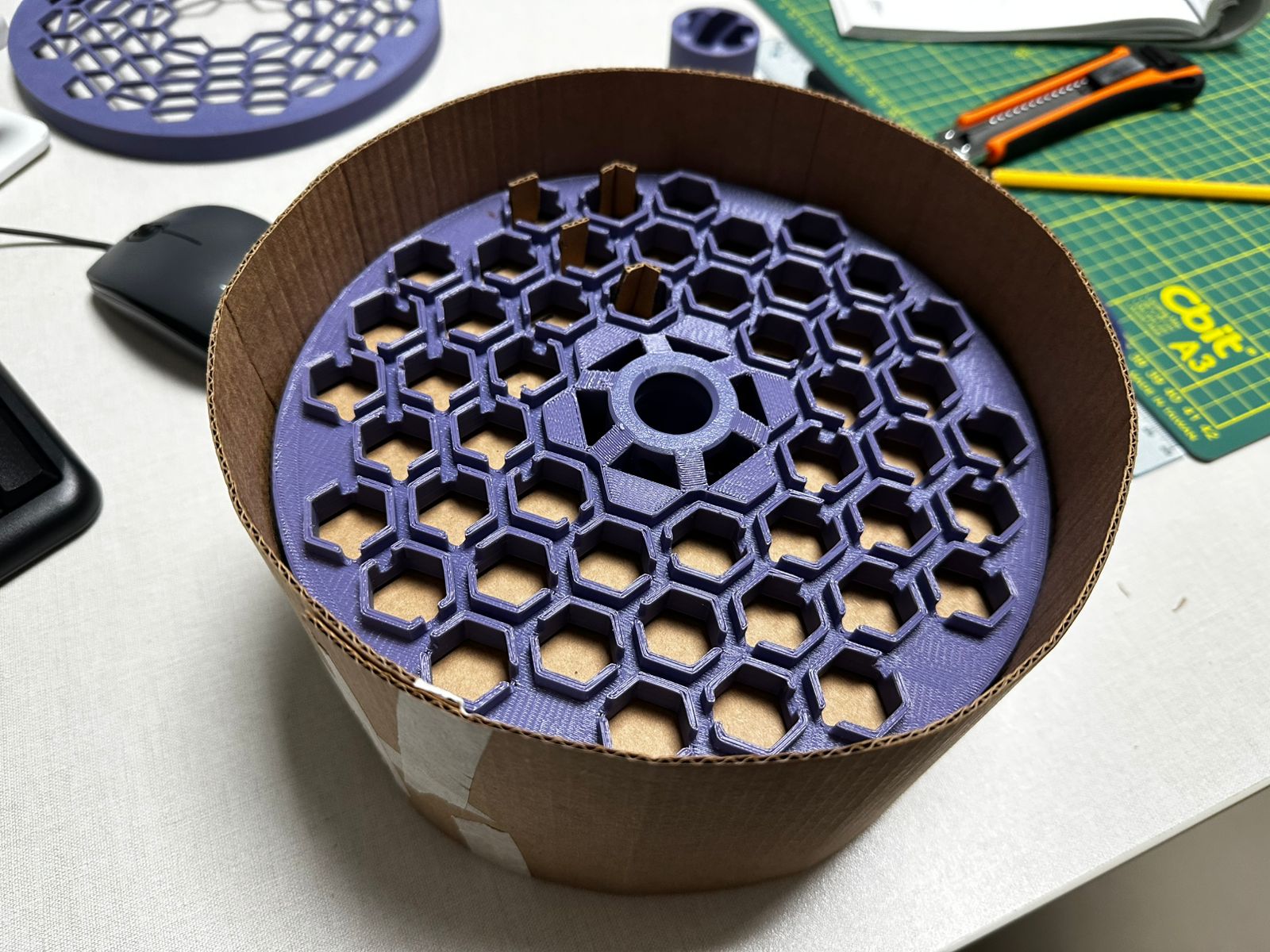
The next step was to explore how each petal could be mechanically connected to a structured base. A hexagonal modular system was used to organize the distribution of contact points, allowing a radial and repeatable logic across the entire surface.
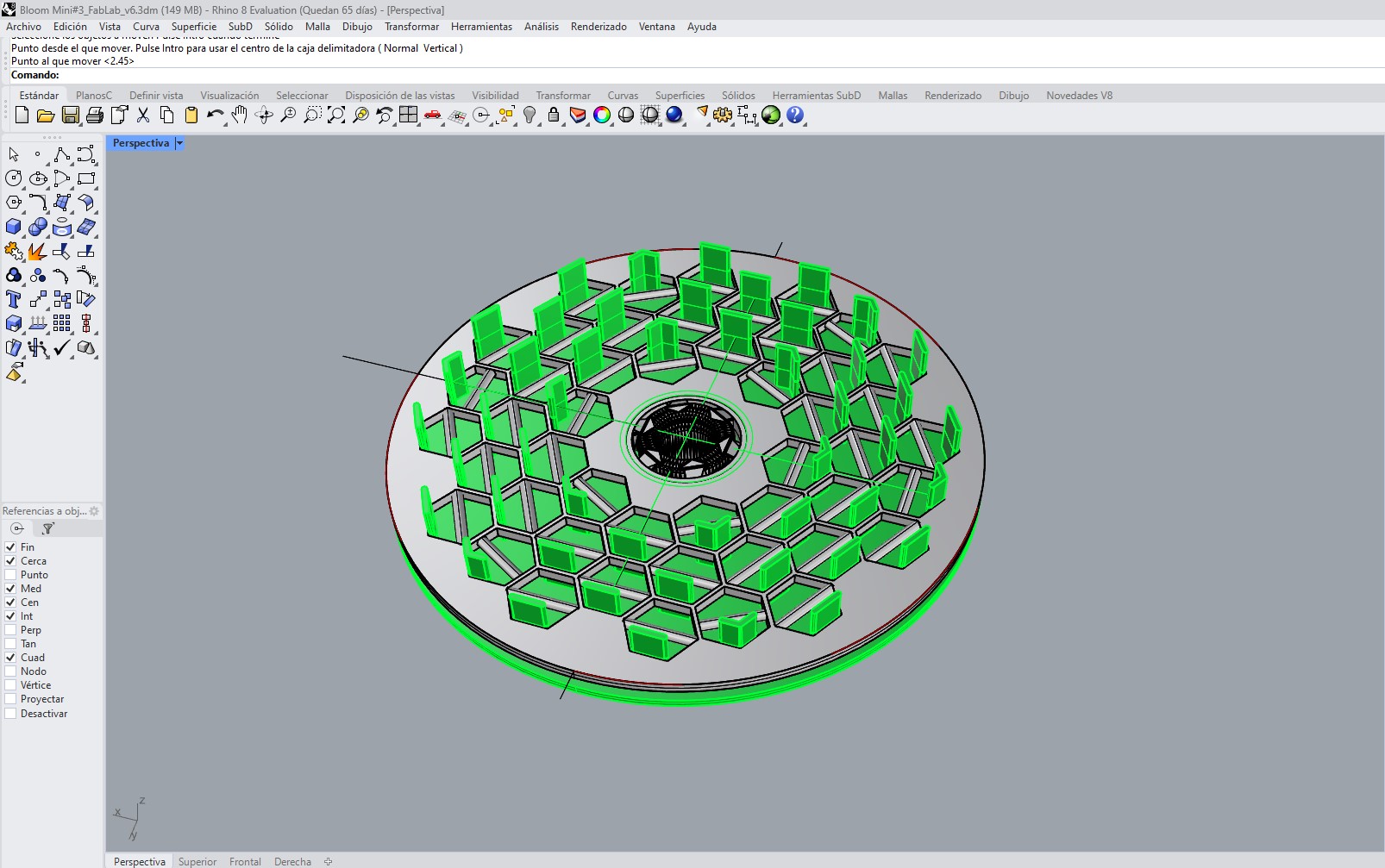
Each hexagonal cell was designed to host a vertical element that would act as a lifting interface. This transformed the system into a field of discrete activation points instead of a continuous or flexible mechanism.
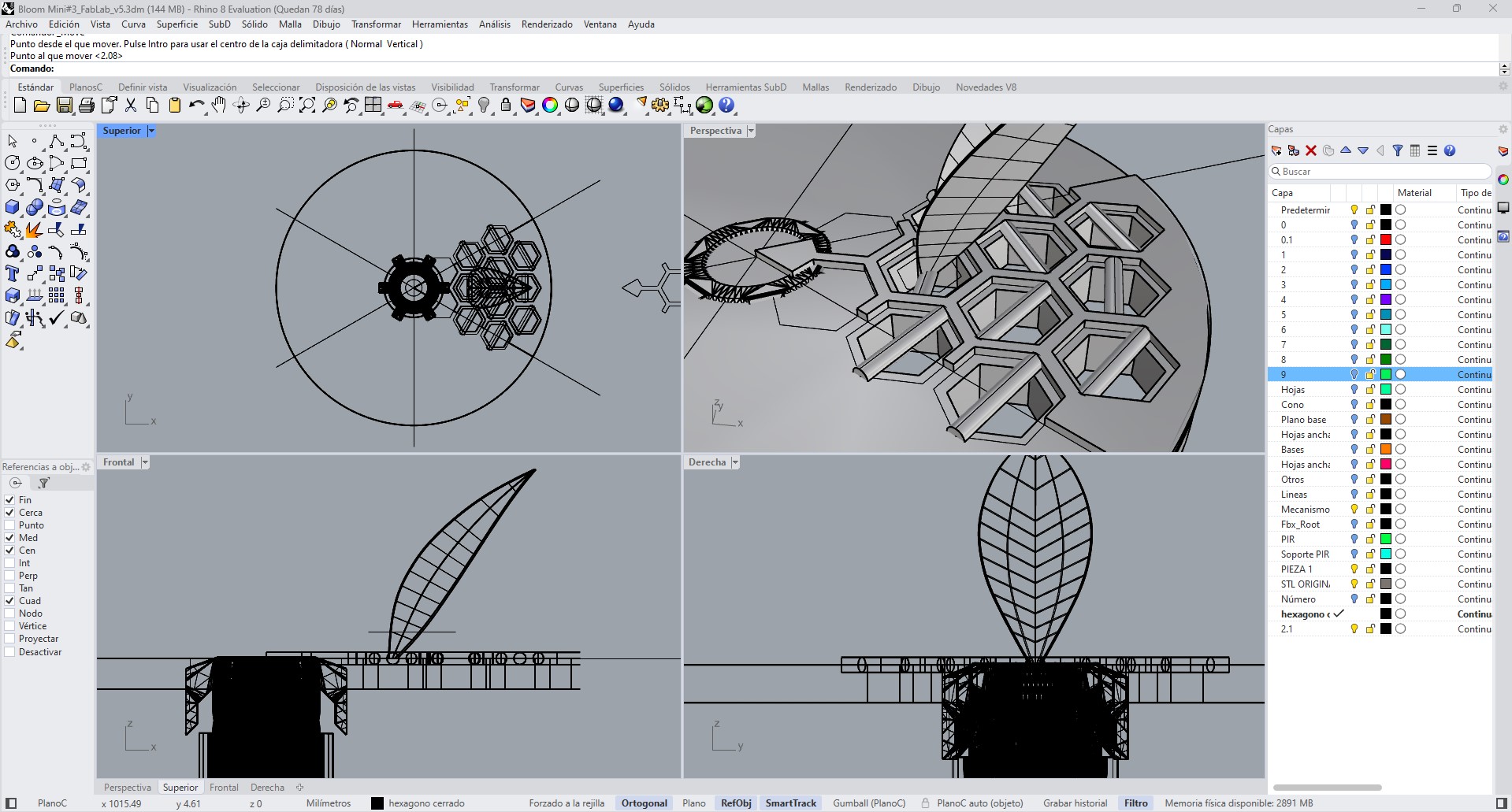
Additionally, a dedicated support for the PIR sensor was designed and integrated at the center of the main structure.
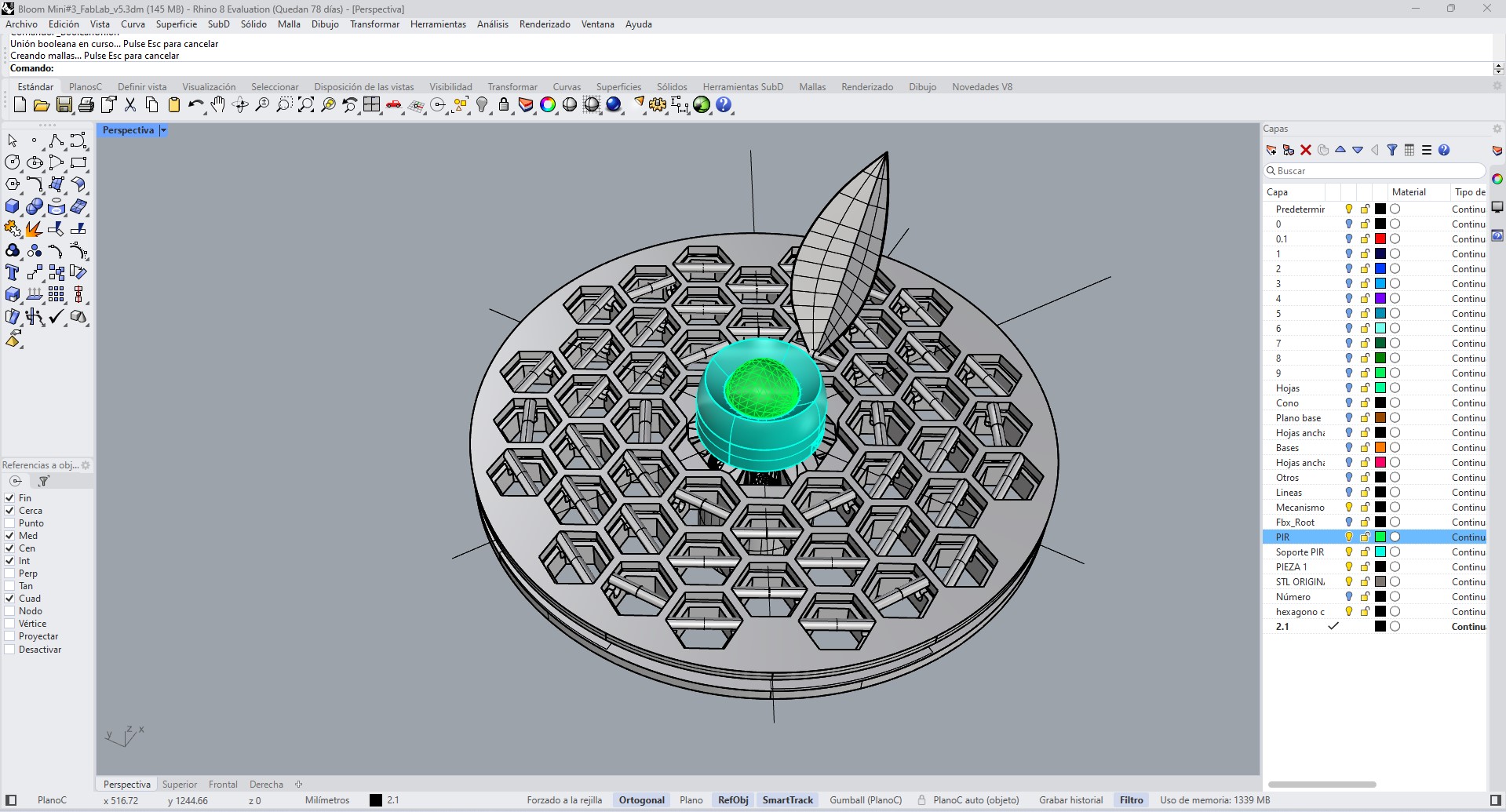
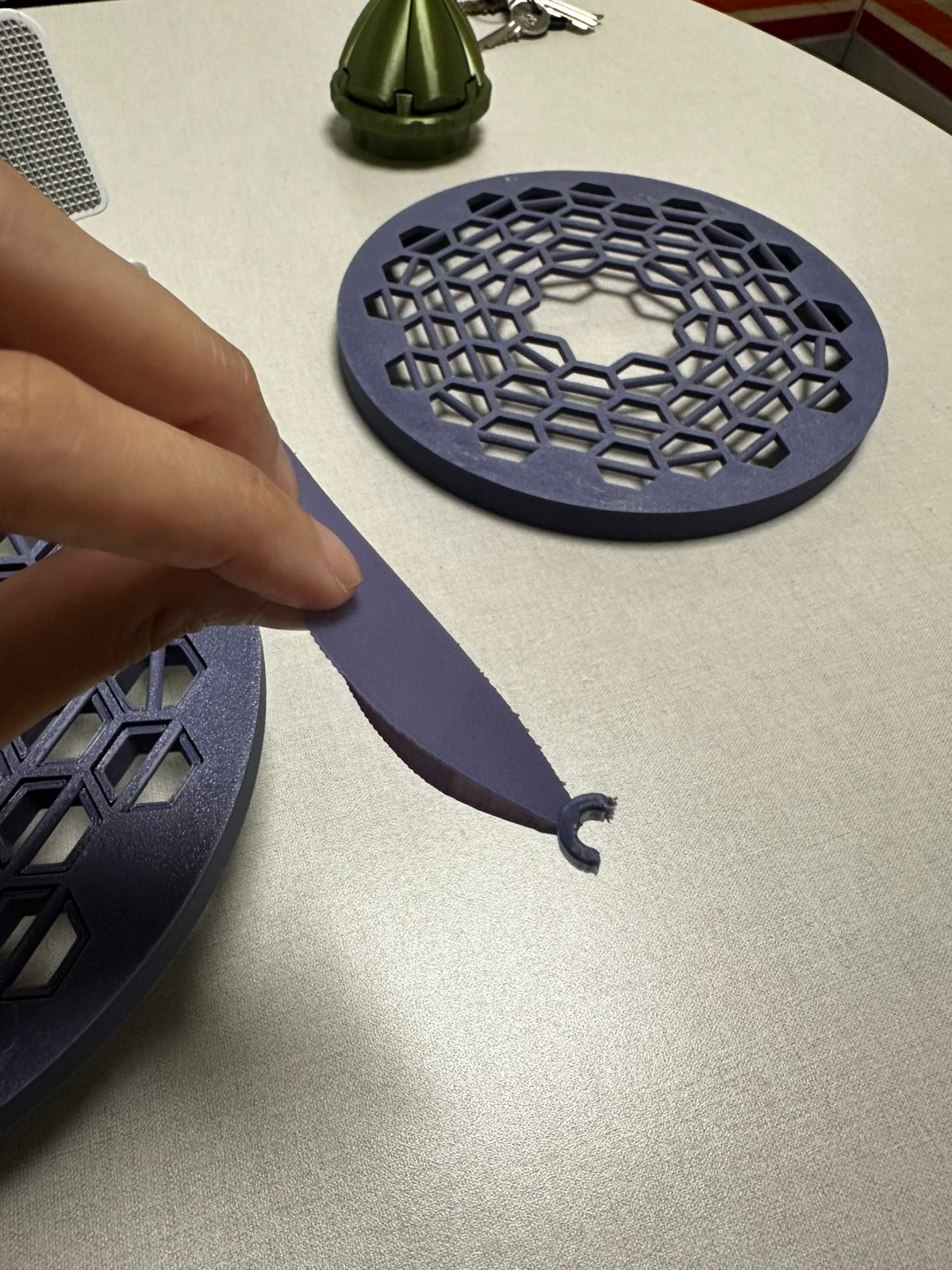
The design was fabricated; however, the intended movement was not achieved. As a result, the mechanism was modified by introducing defined support points for each petal. With this adjustment, when the central mechanism rises, it pushes these points and causes the petals to rotate into a closed position. When the mechanism descends, the petals return to an open position according to their geometry and support conditions.
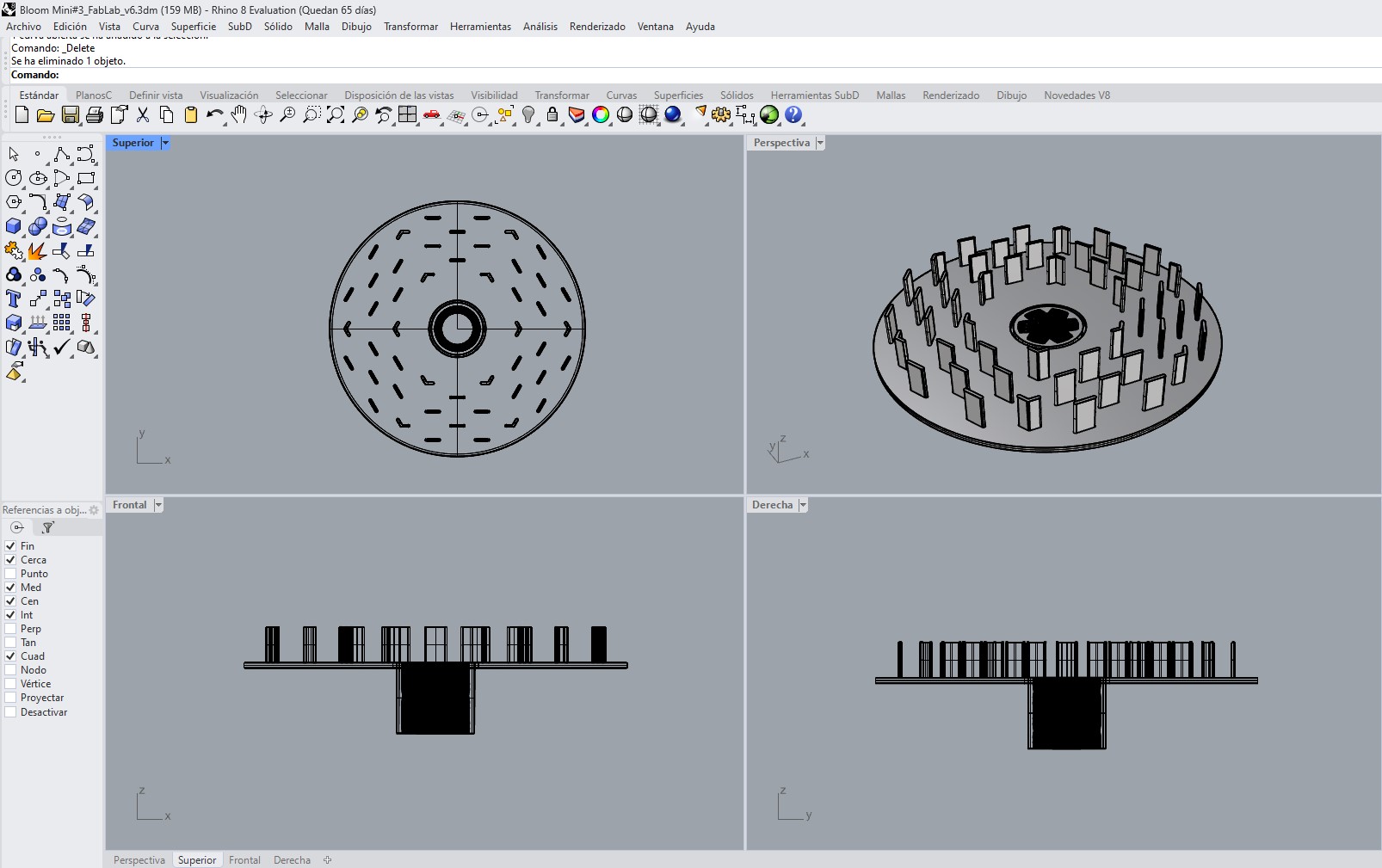
Additionally, a structural base was designed to support the different levels of the mechanism. Some components are fixed to this base, while others are designed with clearances and guide rails to allow controlled movement. The base also incorporates space to house the electronic components in its lower section.
Several iterations were required to refine spacing, alignment, and interaction between components. Special attention was given to tolerances and clearances to ensure that the vertical elements could move without interference.
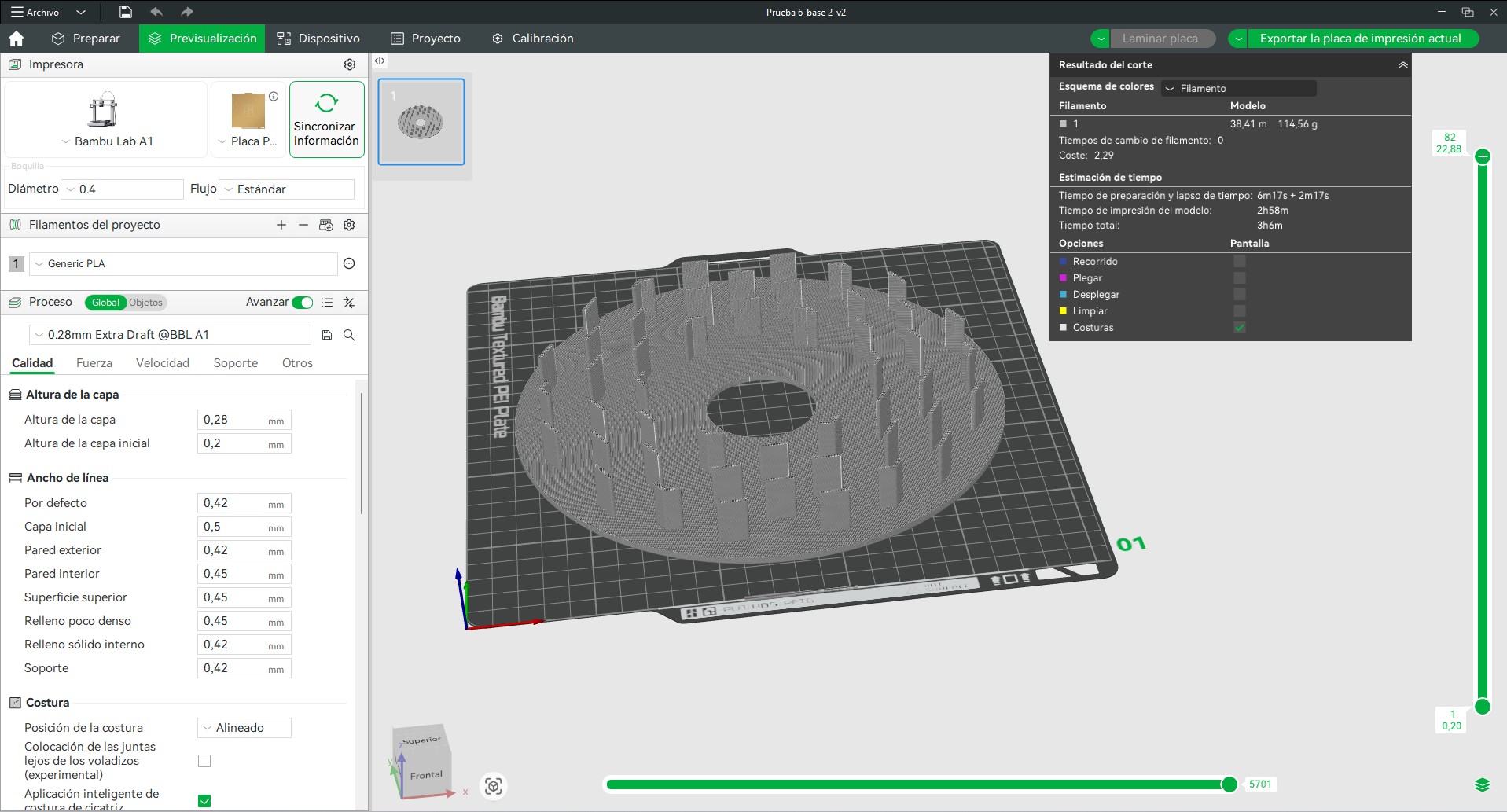
The system was then prepared for fabrication, validating the geometry through slicing simulations. This step helped identify potential issues such as unsupported areas, excessive material usage, and printing time constraints.
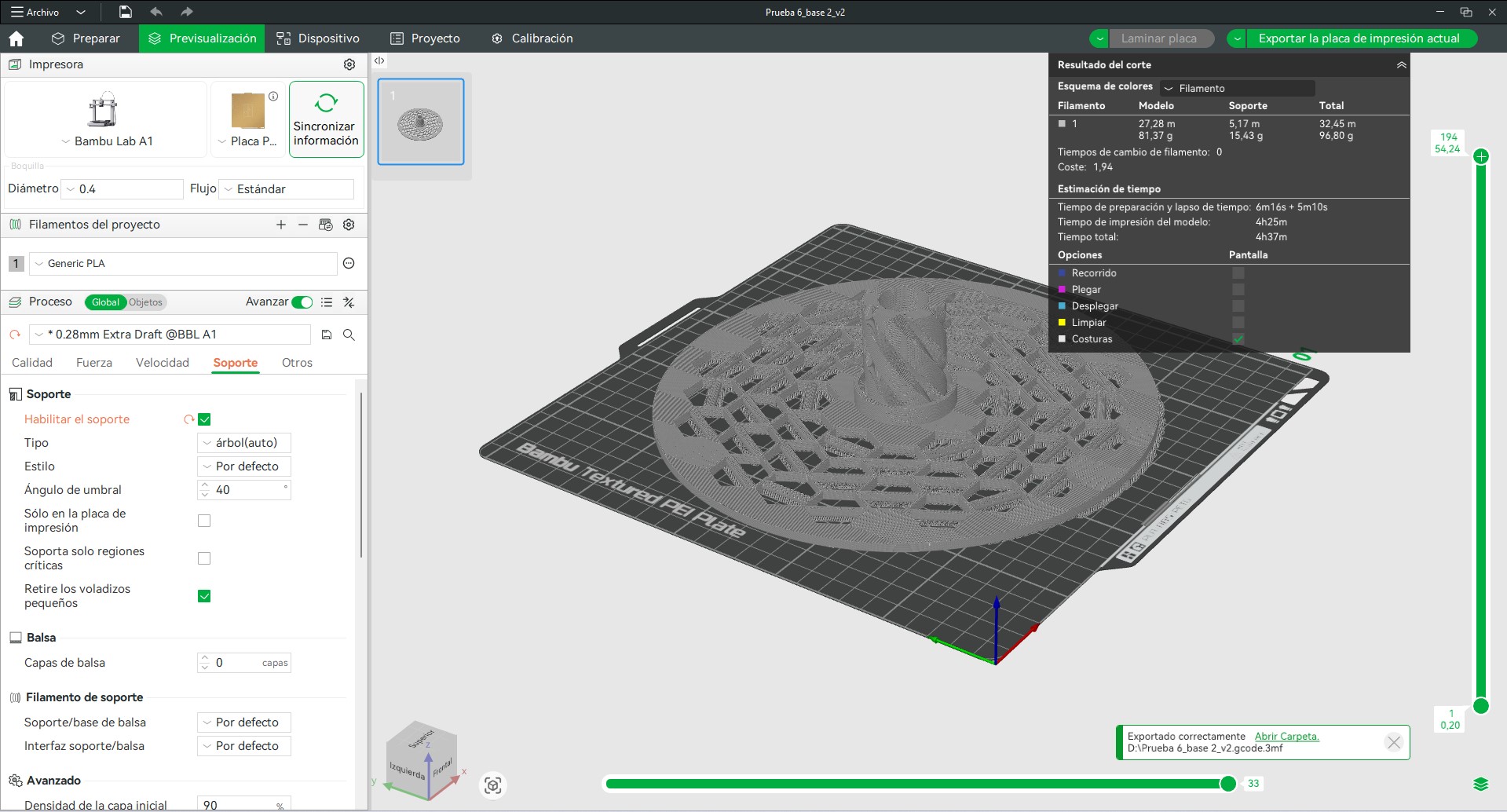
This new iteration offered several advantages. It simplified the system, improved the predictability of movement, and made fabrication more feasible. It also introduced a more modular structure, since each petal could be understood as an individual response unit connected to a larger central mechanism.
At this stage, the project was still under refinement, but the mechanical direction became much clearer. The system was no longer trying to imitate organic behavior through flexible complexity; instead, it began to build that behavior through structured motion and controlled geometry.
3. Physical Prototyping in Cardboard
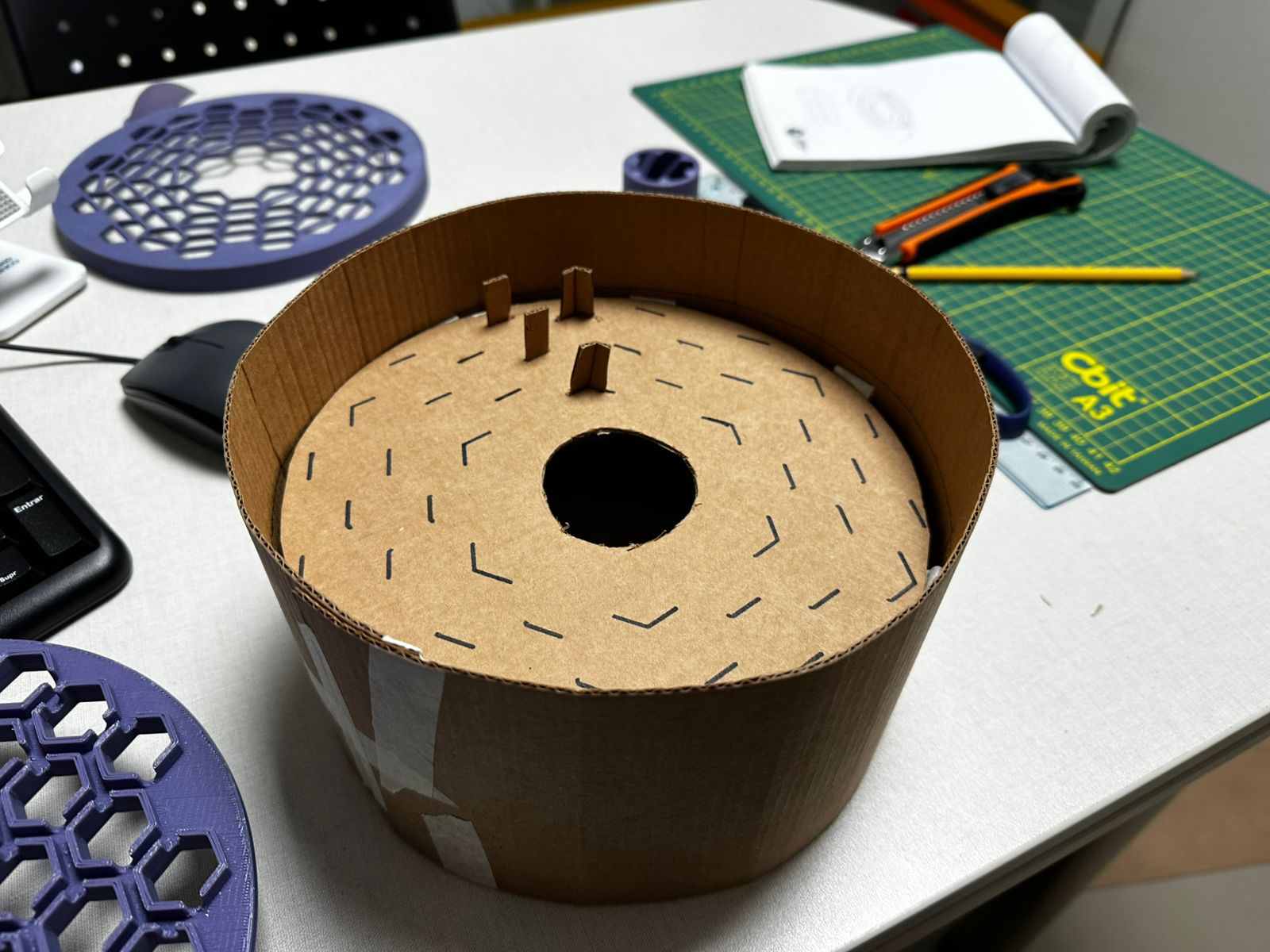
Before continuing with more 3D printed iterations, especially the largest parts, a low-fidelity prototype was developed in cardboard. This stage was important because it allowed rapid validation of dimensions, spatial arrangement, and assembly logic without investing additional print time.
The cardboard prototype was used to check the scale of the flower, the radial distribution of the petals, the internal space required by the mechanism, and the general relationship between moving and structural parts. Because the material was fast and easy to cut, it provided a practical way to test the system at full scale and identify geometric issues early in the process.
This step confirmed that the overall arrangement was viable and that the internal volume and radial logic were working. More importantly, it helped separate which problems belonged to the geometry of the system and which were specific to the printed parts. In that sense, the cardboard model functioned as a fast decision-making tool rather than just a rough mock-up.
Key Learnings
- Analyzing a reference mechanism helped understand how to distribute motion through structure instead of copying form.
- Switching from flexible cables to rigid, guided elements improved control and predictability.
- A central vertical actuation can efficiently trigger coordinated movement across multiple petals.
- Using discrete contact points (hexagonal grid) simplified the system and made it more modular.
- Failed iterations revealed the need for defined support points to control petal rotation.
- Proper tolerances and clearances are critical to ensure smooth movement between components.
- Low-fidelity prototyping (cardboard) allowed fast validation of scale and geometry before fabrication.