
Exploration II: Internal Cable System
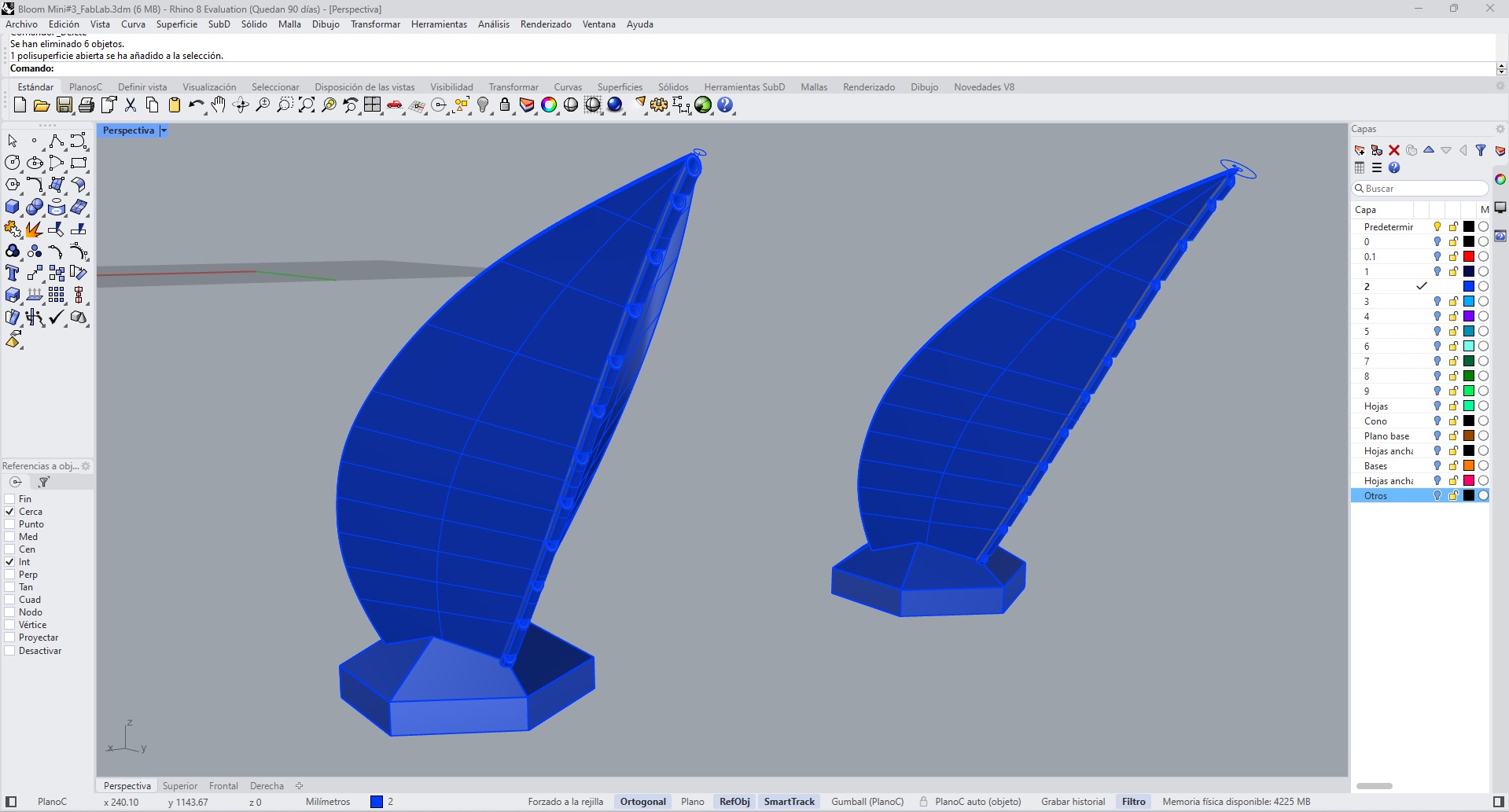
Once the formal language of the flower had been defined, the next challenge was to introduce movement. The first mechanical strategy explored was based on an internal cable system integrated into the petals.
The intention of this approach was to transmit force from a central point toward each petal using flexible internal elements. In principle, this would allow a single input movement to activate multiple parts at once. The idea was attractive because it suggested a lightweight mechanism hidden inside the flower, potentially preserving the organic appearance of the petals.
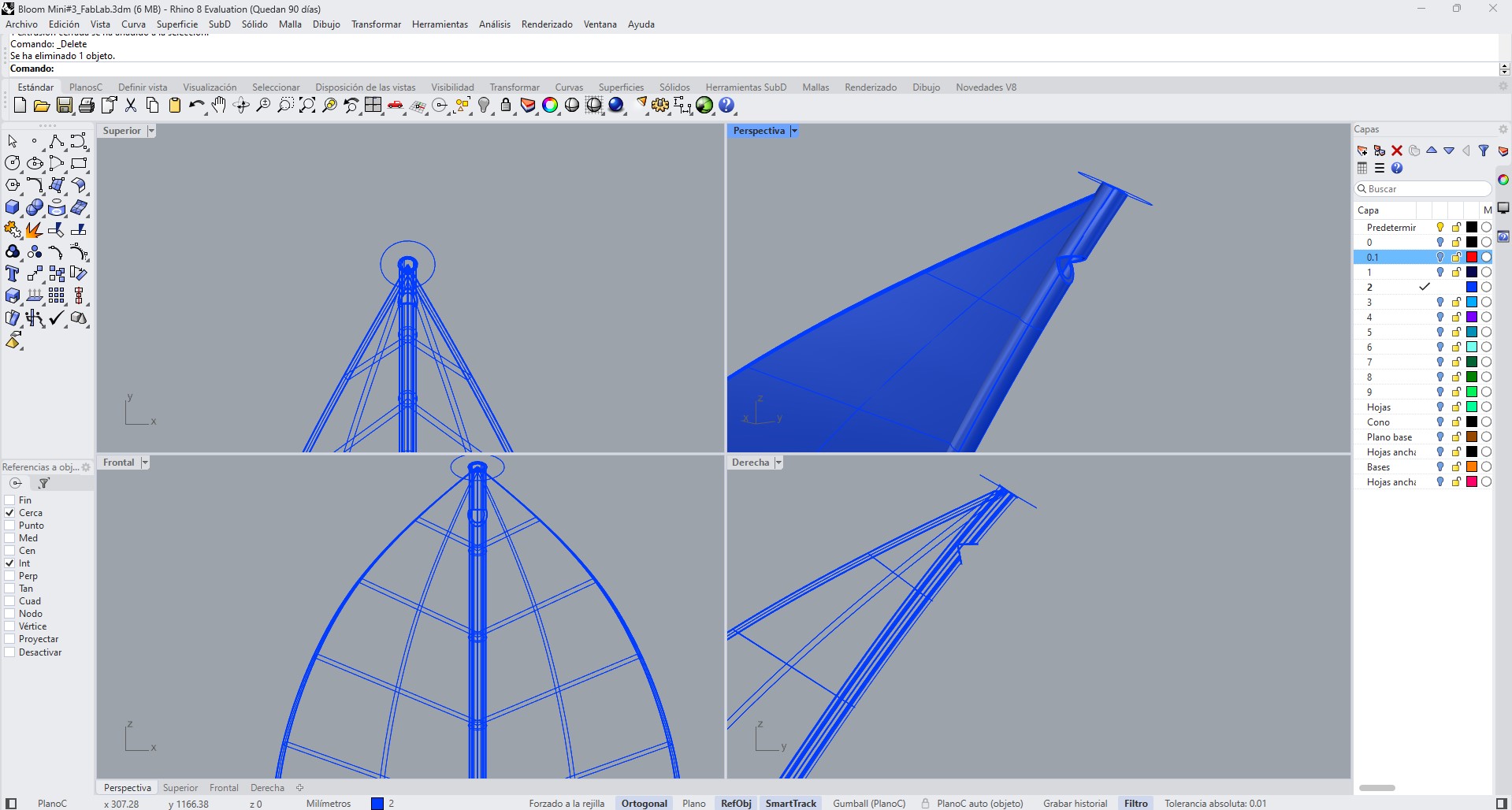
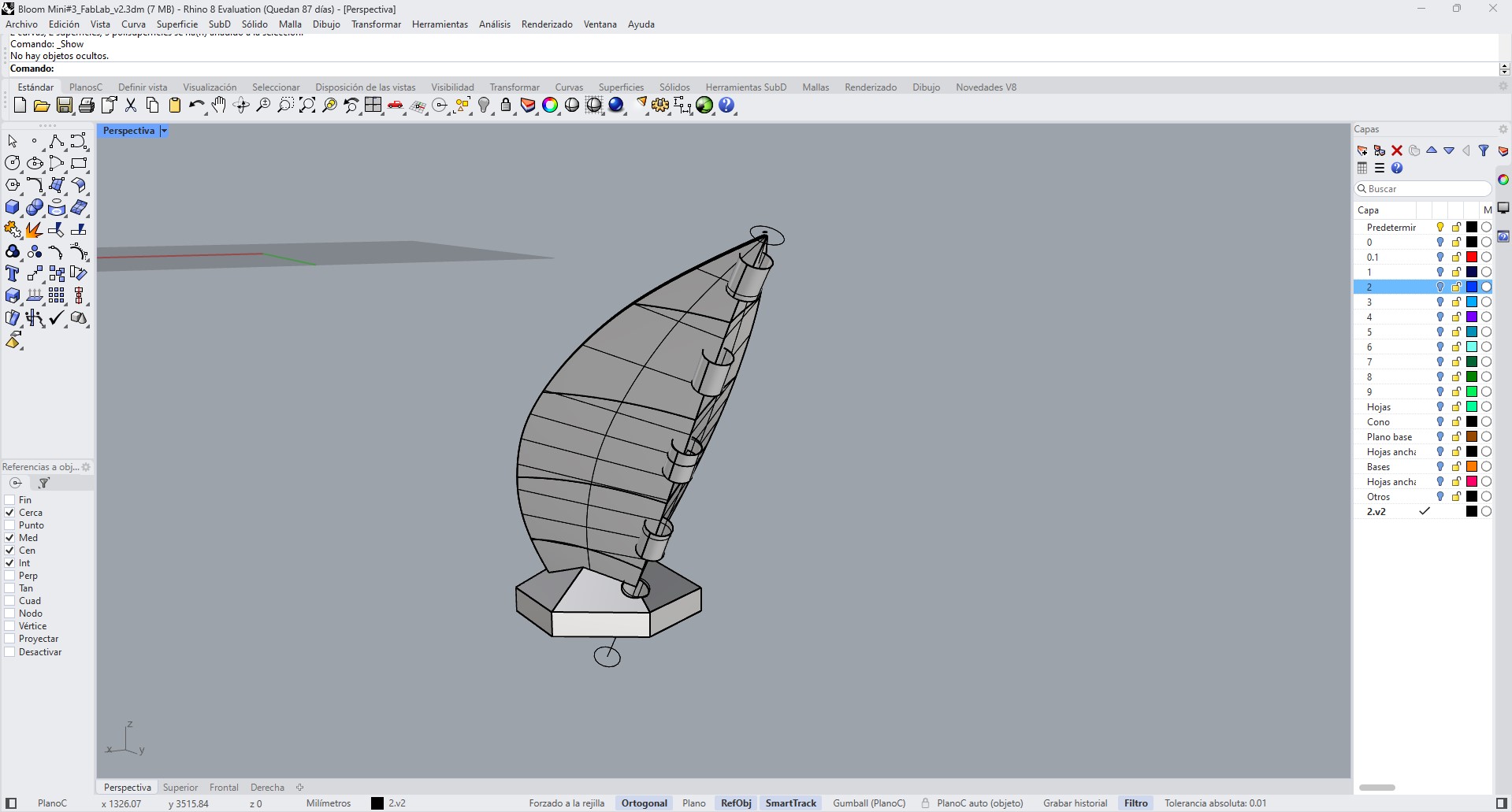
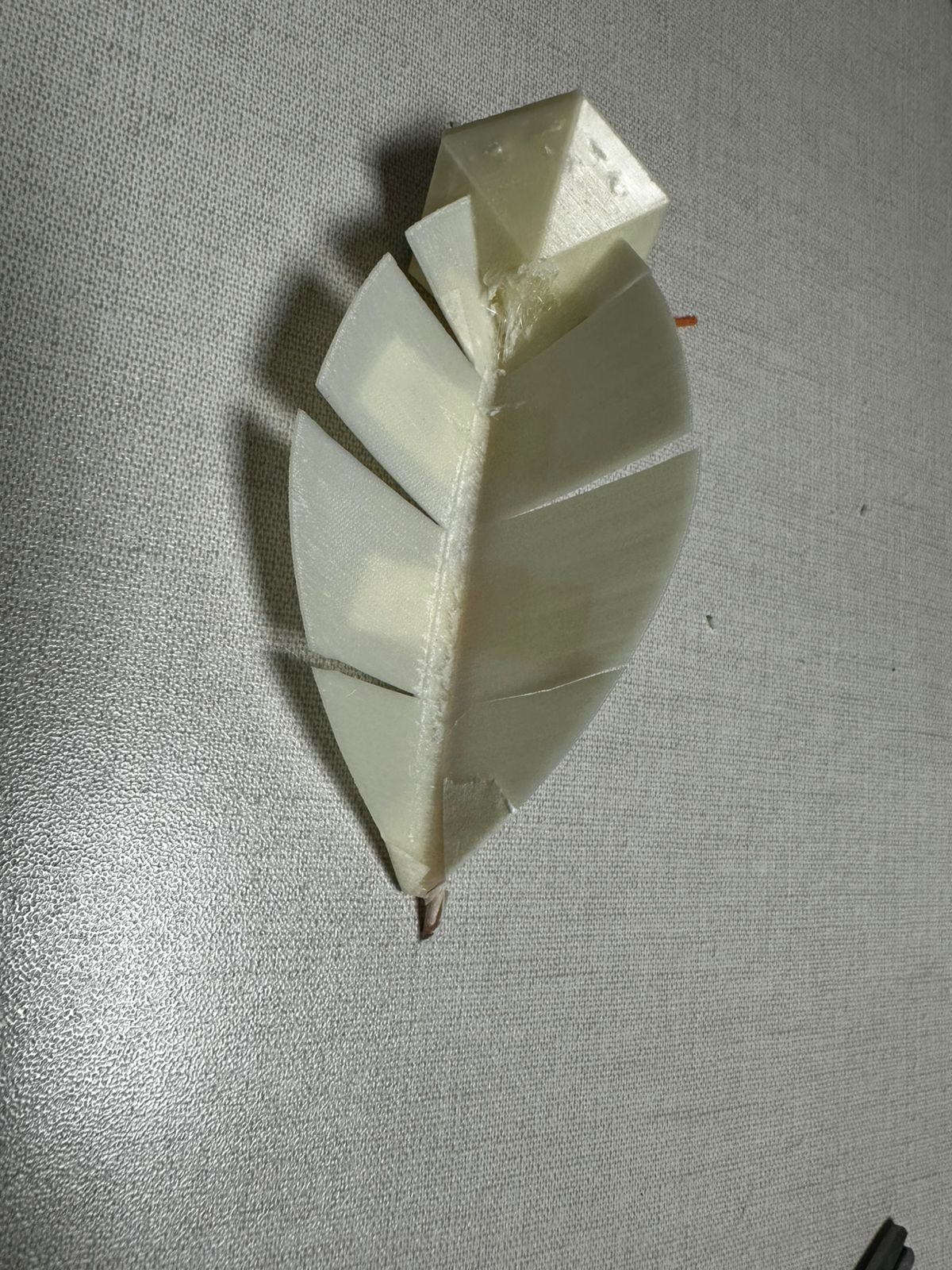
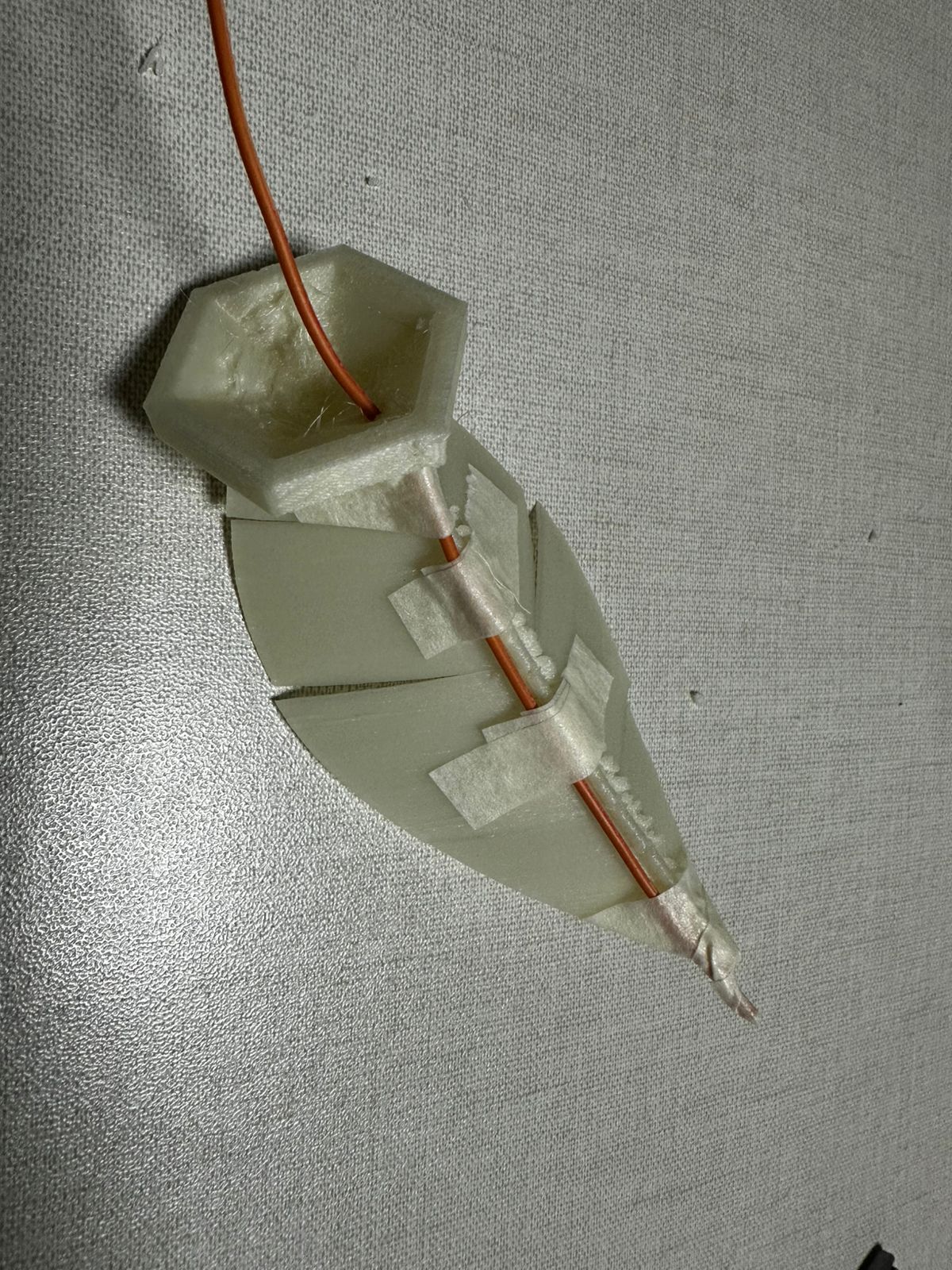
The development of this stage involved testing how the internal path of the cable could be integrated into the petal geometry, how tension could be distributed, and how the petals would react when pulled from the center. This required thinking simultaneously about form, routing, anchoring points, and the deformation behavior of each element.
Key Learnings
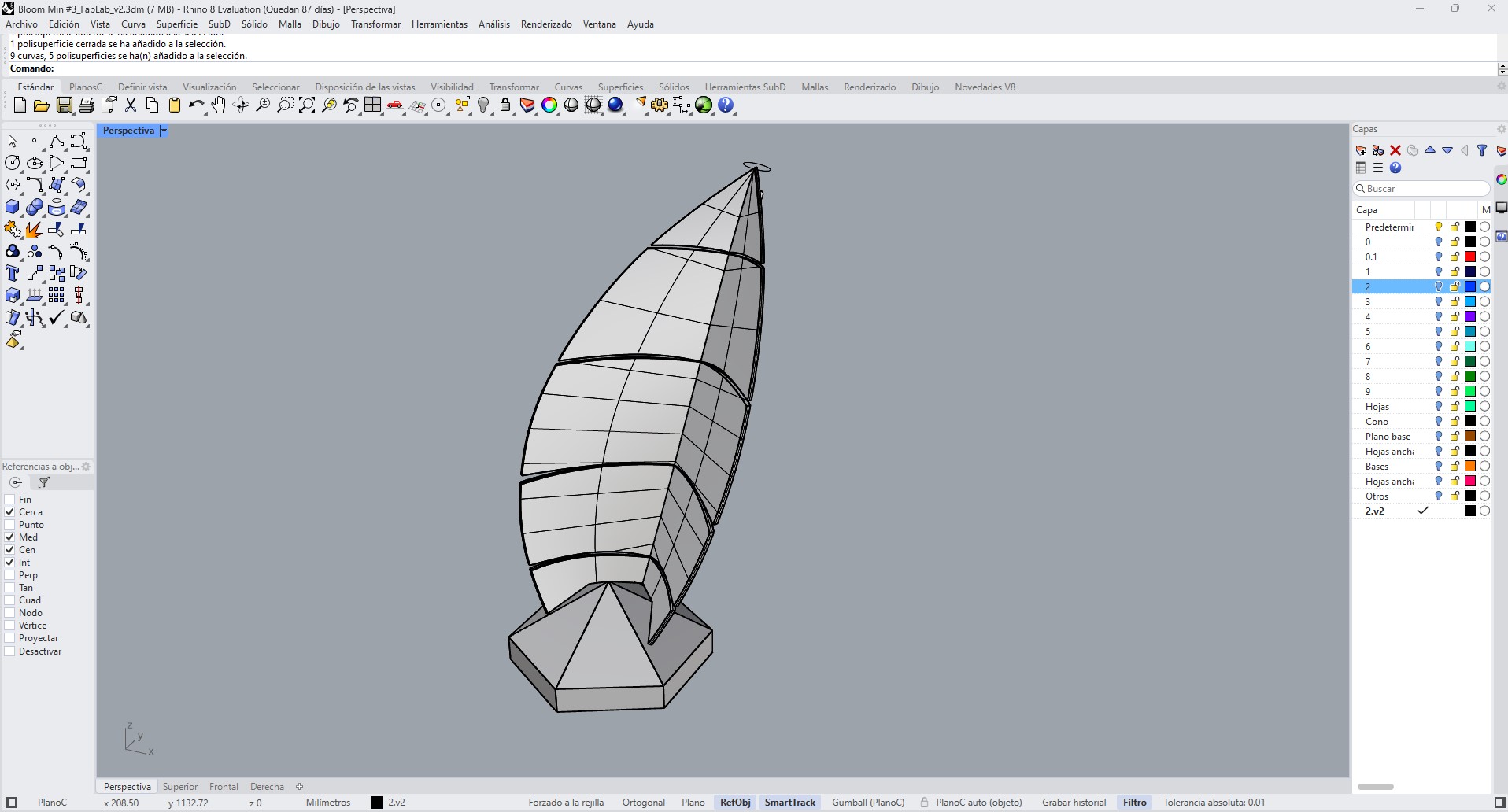
However, this strategy introduced several difficulties. The geometry became harder to control because the motion depended on flexible behavior rather than guided movement. The response of the petals was not fully predictable, assembly became more complex, and the system required too much adjustment to maintain consistency. As a result, the motion lacked the precision and repeatability needed for the project.
This first mechanical exploration was therefore discarded, but it was still useful because it clarified an important design decision: the project required a more rigid and geometrically controlled mechanism instead of a system based primarily on tension and flexible transmission.