Invention, Intellectual Property and Income.
overview.
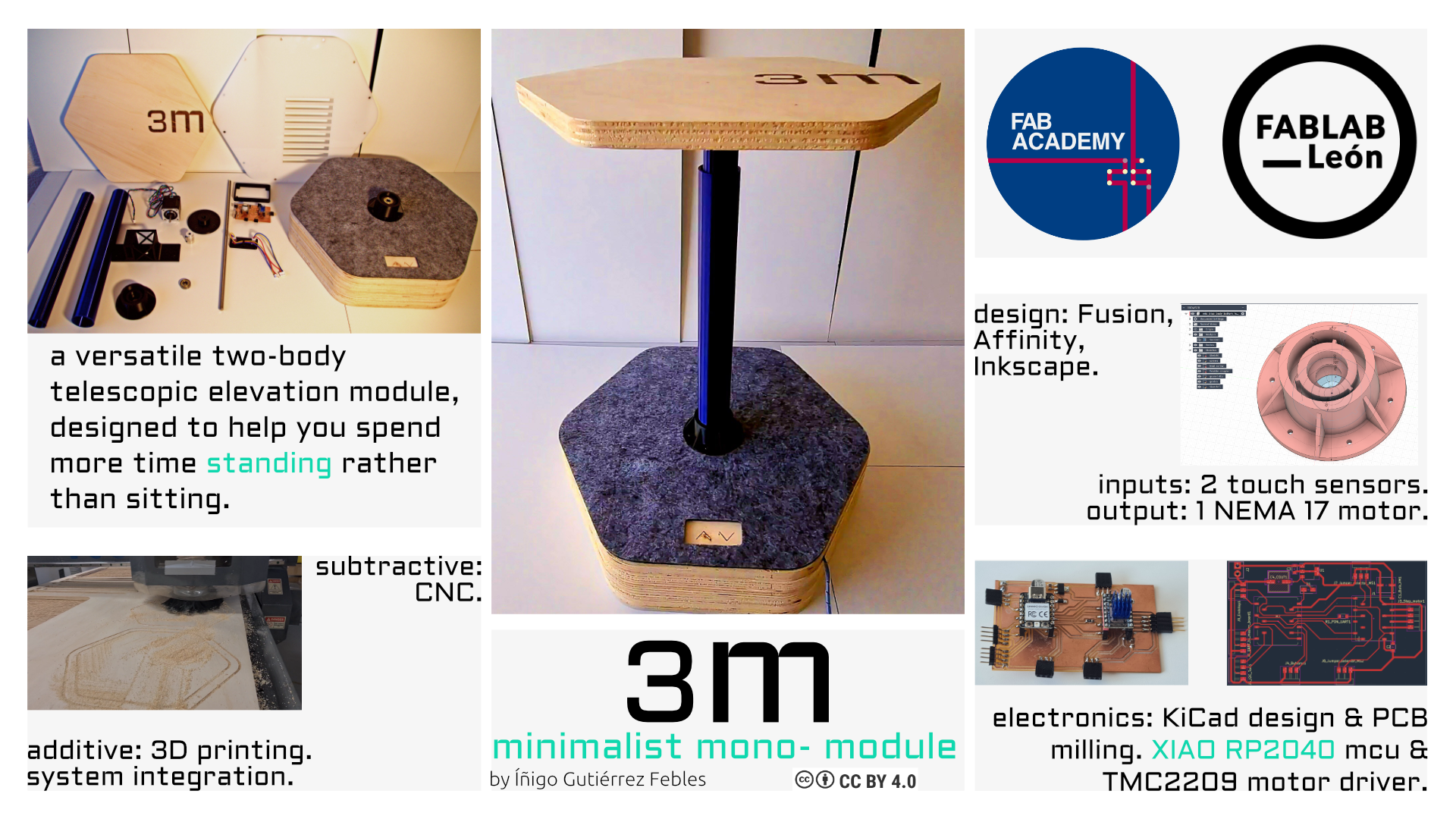
This week is about how the 3m module leaves the lab: who it could be useful to, how I share it, under which license, and where things stand now that the defense is done.
The final project is the 3m: minimalist-mono-module, a single telescopic elevation module. It works: it raises and retracts under its own drive train. The full four-leg desk it points to is the product vision, not this deliverable — that comes in later iterations.
learning objectives.
- Develop a plan to share the work and raise awareness of it.
- Choose a license that matches my openness philosophy and justify it.
- Outline realistic future opportunities for the project.
- Track the final-project status now that it has been presented.
assignment.
- Develop a dissemination plan for the final project.
- Complete the final project and track progress.
dissemination plan.
who is it for.
- Makers who want a real mechatronic elevation mechanism, not just a desk-frame kit.
- People with a privacy-first, open-source mindset who don’t want a cloud-locked commercial desk.
- Future me / future iterations: the mono-module is the seed of a multi-leg desk.
how I share it.
Honest and small-scale, on purpose:
- Site documentation — the full build lives here: BOM, CAD, KiCad files, firmware, assembly steps. This is the main channel.
- The video — I share the presentation video with friends and anyone curious.
- In person — if someone visits, I show the module working physically. No formal workshop or campaign; that is not the point of this project.
intellectual property and licensing.
My orientation: fully open, attribution only. Anyone may use, modify, build on, and even sell it — the only condition is crediting the original author and linking back to the source.
A single project mixes documentation, code and hardware, which need different tools, so the intent maps to three licenses:
| Layer | What it covers | License | What it requires |
|---|---|---|---|
| Documentation + CAD/design | this site, Fusion files, drawings | CC BY 4.0 | attribution only |
| Firmware / software | XIAO RP2040 source code | MIT | keep copyright + license notice |
| Hardware design | the physical module itself | CERN-OHL-P 2.0 | attribution, permissive (no copyleft) |
CERN-OHL-P 2.0 is the Permissive variant of the CERN Open Hardware Licence — the hardware equivalent of MIT: use, modify, manufacture and distribute freely, just keep the notices. I deliberately avoided the reciprocal CERN variants (-W / -S) and the common CC BY-NC-SA for the same reason: NonCommercial and ShareAlike add restrictions I do not want.
Attribution mark used on the final-project page and in the presentation:
3m: minimalist-mono-module © 2026 by Íñigo Gutiérrez Febles is licensed under CC BY 4.0![]()
![]()
Plain-text version for the video and slide credits:
3m: minimalist-mono-module © 2026 by Íñigo Gutiérrez Febles is licensed under CC BY 4.0. To view a copy of this license, visit https://creativecommons.org/licenses/by/4.0/
income and future development.
For now this is learning and personal use only — no business plan, no income.
Looking ahead, I see it becoming a proper open-hardware / open-software project with a mixed model:
- DIY profile — everything is documented and downloadable; you build it yourself, free, under the licenses above.
- Done-for-you profile — for users who just want it working, the same design becomes a finished product they can buy.
The technical path there runs through the next iterations: moving from one mono-module to a multi-leg desk, where the real challenge is coordinating several legs in sync.
final project status.
The 3m module was presented and defended. Tracking, now that the milestone is past:
what is done.
- 3m module built and defended; the mono-module elevates and retracts under its own drive train (T8x8 leadscrew, NEMA 17, TMC2209, FastAccelStepper with soft position limits).
- PETG concentric cylinders printed full length (360 mm) with radial anti-rotation ribs at 120 degrees.
- Custom milled control PCB (XIAO RP2040 + TMC2209 + LM2940) and two TTP223 capacitive touch controls.
- Presentation video and slides produced.
what is next (future iterations).
- Move from a single module to a multi-leg desk — coordinating motion across legs.
- Mechanical refinements identified during the build (e.g. internal shoulder for the nut block).
what is working / what is not.
- Working: the elevation mechanism, the anti-rotation ribs, the touch control, the position limits.
- Open question: how the single-module logic scales to several synchronized legs.
what I learned.
See reflections below.
reflections.
The legal side of making — licenses, patents, the whole thicket of legalese — is complex and not especially inviting; I doubt it attracts many makers or maker-wannabes, myself included. But choosing a license forced me to actually decide what I want, and what I want turned out to be simple and generous: if someone can take my documentation, get inspired, and build their own thing from it, that is a beautiful and inspiring outcome. Picking plain attribution (CC BY) over the more common CC BY-NC-SA was a deliberate choice to keep that door fully open instead of half-closing it with NonCommercial and ShareAlike clauses I did not actually believe in.
The lesson: pick the license that matches what you genuinely want to allow, not the one everyone defaults to.
design files.
- Licenses:
- Documentation + design — CC BY 4.0: https://creativecommons.org/licenses/by/4.0/
- Firmware / software — MIT: LICENSE (repo root)
- Hardware — CERN-OHL-P 2.0: /2026/labs/leon/students/inigo-gutierrez/files/week18/cern_ohl_p_v2.pdf
- Final project page: https://fabacademy.org/2026/labs/leon/students/inigo-gutierrez/final-project/
- Presentation slide: /2026/labs/leon/students/inigo-gutierrez/presentation.png
- Presentation video: /2026/labs/leon/students/inigo-gutierrez/presentation.mp4
{kind=link}